Country Selector


- ホーム>
- 商品情報>
- 特設サイト>
- 「汎用センサ」の基礎知識>
- 磁気形近接センサ(原理と構造)

磁気形近接センサ(原理と構造)
磁気形近接センサ(原理と構造)
1. 動作原理
磁気形近接スイッチは、磁気検出素子によって、その動作原理が異なる。表7に代表的な検出素子による動作原理の概略とその特徴を示す。 リードスイッチ形の詳細な動作原理を以下に説明する。

・リードスイッチ形
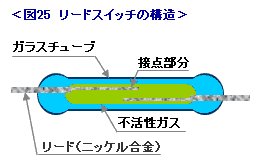
検出素子にリードスイッチを使用した磁気形近接スイッチの基本的動作はリードスイッチによって決まる。 リードスイッチは図25のように2枚のニッケル合金(磁性体)リードの一部をオーバーラップさせ、ガラス管に封入したもので、 このオーバーラップ部分は表面に金、銀及びロジウムなどの接点処理が施されており、さらに接点の活性化を防ぐためにガラス管内に不活性ガスを封入している。
リードスイッチに電磁コイルまたは磁石によって磁界が作用するとリードが磁化され、磁界の2乗に比例したオーバーラップ部分の吸引力Fpが生じる。
この吸引力でリードがたわむと、リード自体の弾性により反発力Fsが生じる。
すなわち、Fp>Fsであるような磁界において接点は閉成される。
また、Fp<Fsとなるような磁界において接点は開放される。
磁気形近接スイッチでは、このようなリードスイッチの動作機構を利用し、磁石との組合せにおいて各種の機能を得ている。
2. 構造とその動作
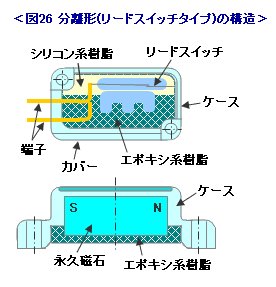
磁気形近接スイッチの構成は、大別して一体形、分離形、溝形の3種類がある。これらの構成には応用上、それぞれ特徴があり、1. 動作原理で示した各種検出素子の特徴と組合わせて使用されている。分離形・リードスイッチ形の内部構造の実際例を図示する。(図26参照)
分離形は、検出素子と永久磁石が別々のケースに内蔵され、エポキシ樹脂などで完全に埋め込まれている。永久磁石を検出体として、 その近接を検出するものが基本動作である。分離形の場合、接続方式はリード線引出式、ネジ端子式、差込み式と各種方式が取られている。(弊社磁気形近接センサ形GLSはネジ端子式である。)
出典 : 社団法人 日本電気制御機器工業会「制御機器の基礎知識-選び方・使い方-センサ編」 2001年7月
掲載の記事・写真・図表などの複写及び無断転載を禁止します。
著作権は社団法人 日本電気制御機器工業会に属します。
一部誤記修正しています。

磁気形近接センサ商品
磁気形近接センサ商品
近接センサ関連情報


 Facebook
Facebook© Copyright OMRON Corporation 1996 - 2026.
All Rights Reserved.