モバイルロボット
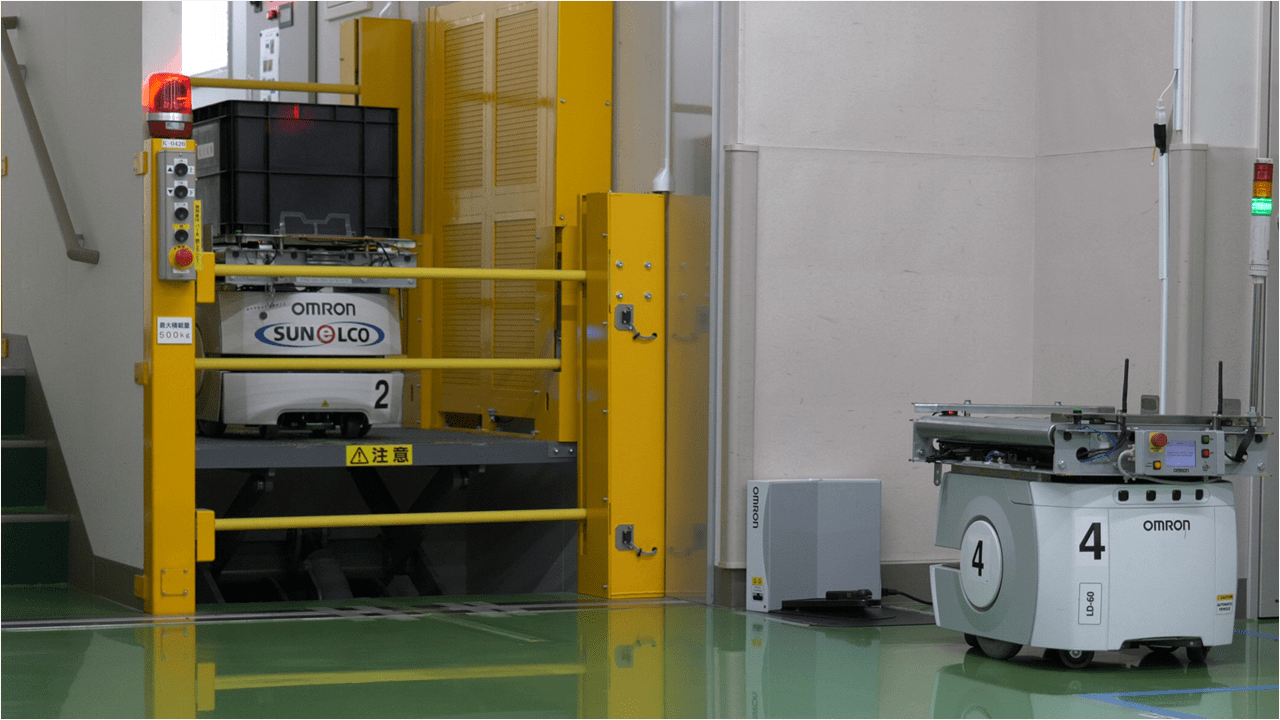
資材や部品を自律搬送し、高度な障害物回避で変化の多い生産現場でも搬送を効率化
最大100台までの一括管理により、搬送プロセスを最適化
ラインアップ



ソフトウェア&コントローラ/オプション

ソフトウェア
MobilePlanner
モバイルロボット統合ソフトウェア

コントローラ
FLOW Core Fleet Manager
最大100台のモバイルロボットの運行管理

呼出し ドアオープナー
モバイルI/O ボックス
呼び出しと外部デバイス制御の運用自動化ツール

位置認識
High Accuracy Positioning System(HAPS)
高精度停止オプション
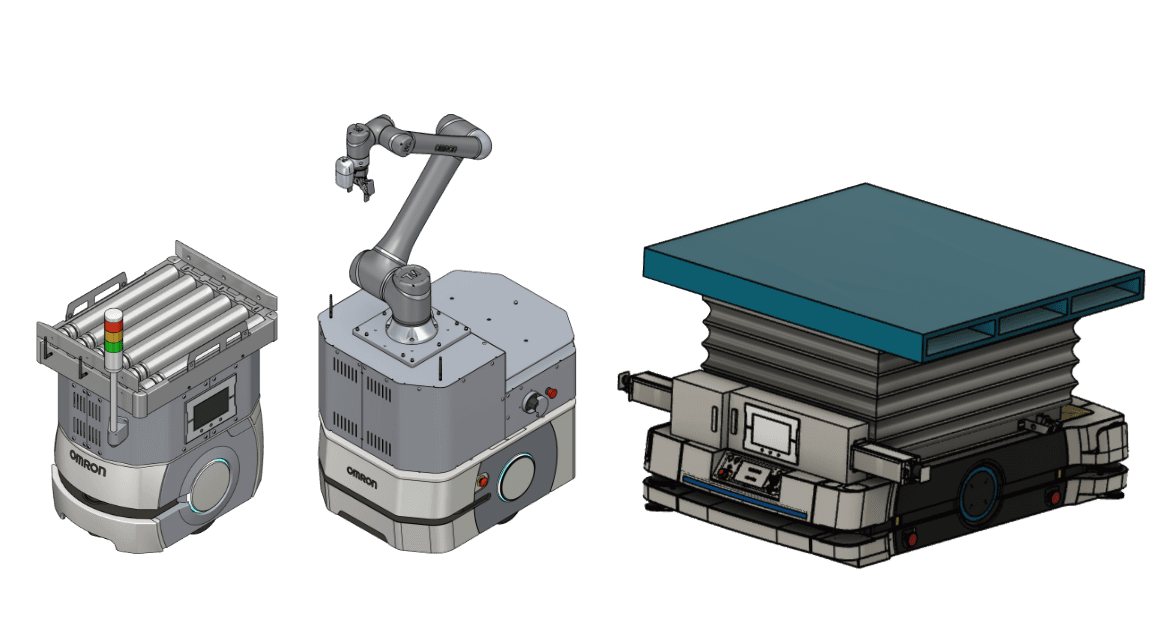
用途別アプリケーションモデル
リフタ・コンベア・カートなどの機構を搭載した、パートナーメーカ提供のモバイルロボット拡張モデルです。用途に合わせた構成をカタログモデル化しており、導入イメージを持ちやすく、設計工数の削減に貢献します。
用途別アプリケーションモデルを見る


モバイルロボットの
活用ガイド・事例
すべて見る

ロボットシステム導入カタログ
(オムロンフィールドエンジニアリング株式会社)
オムロングループならではの、ロボット導入後のメンテナンスサービスや保守契約についてもご理解いただける内容です。

モバイルロボット(AMR)導入までの7つのステップと運用における3つのポイント
搬送の自動化を実現するモバイルロボットの構想から導入までを説明した参考資料をご案内いたします。

導入事例:三機工業株式会社様
自社施工現場の空調性能検査
自律走行型の風量測定ロボット[開発中]により空調性能試験工数を従来比75%削減
モバイルロボットのセミナ情報

モバイルロボットの
よくあるご質問すべて見る
![]()
ソフトウェア
MobilePlanner
モバイルロボット統合ソフトウェア
MobilePlannerソフトウェアは、マップの作成やモバイルロボット設定の管理ができます。

- モバイルロボットの走行位置のモニタ、複数ロボットの走行監視、モバイルロボットへの走行指示
- マップファイル、到着地点、タスクの作成と編集。ロボットからのスキャンデータから走行マップを制作しますが、モバイルロボットからFleet Manager経由で、マップ制作のためのデータ要素をインポートします。MobilePlannerにより集積データ分析によるマップの生成をします。
- モバイルロボット設定(充電のドッグ位置、進入禁止エリアの設定など)
![]()
位置確認
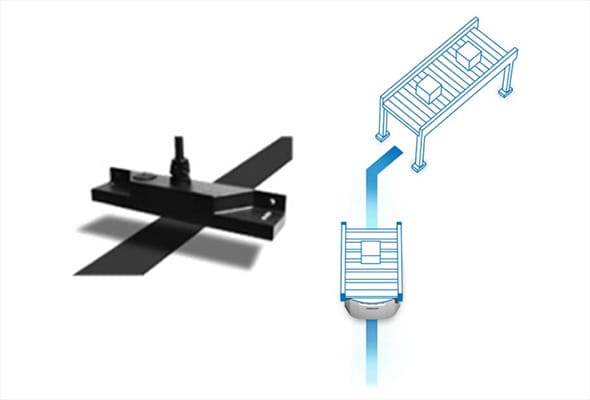
HAPS
(High Accuracy Positioning System)
高精度停止オプション
- 特長
- 精密なドッキングやワークの受け渡しでは、ミリ単位の停止精度が求められます。HAPS(High Accuracy Positioning System)は、こうした高精度な位置決めが必要な工程に対応するオプション機能です。必要な位置決めポイントにのみ磁気テープを設置することで、モバイルロボットを±10mmの位置精度、±0.5°の回転精度で正確に停止・位置合わせすることが可能です*。
- 直進はもちろん、角度をつけた接近や後退時でも精度を維持し、自律走行の自由度を活かしながら、繰り返し安定した位置決めが行えます。
- 詳細については、各ロボットページの定格・性能で、ご確認ください。
- *単体運用時
ロボットの導入サポート
検討から課題解決まで一貫してサポート。導入後のアフターケアもお任せください
