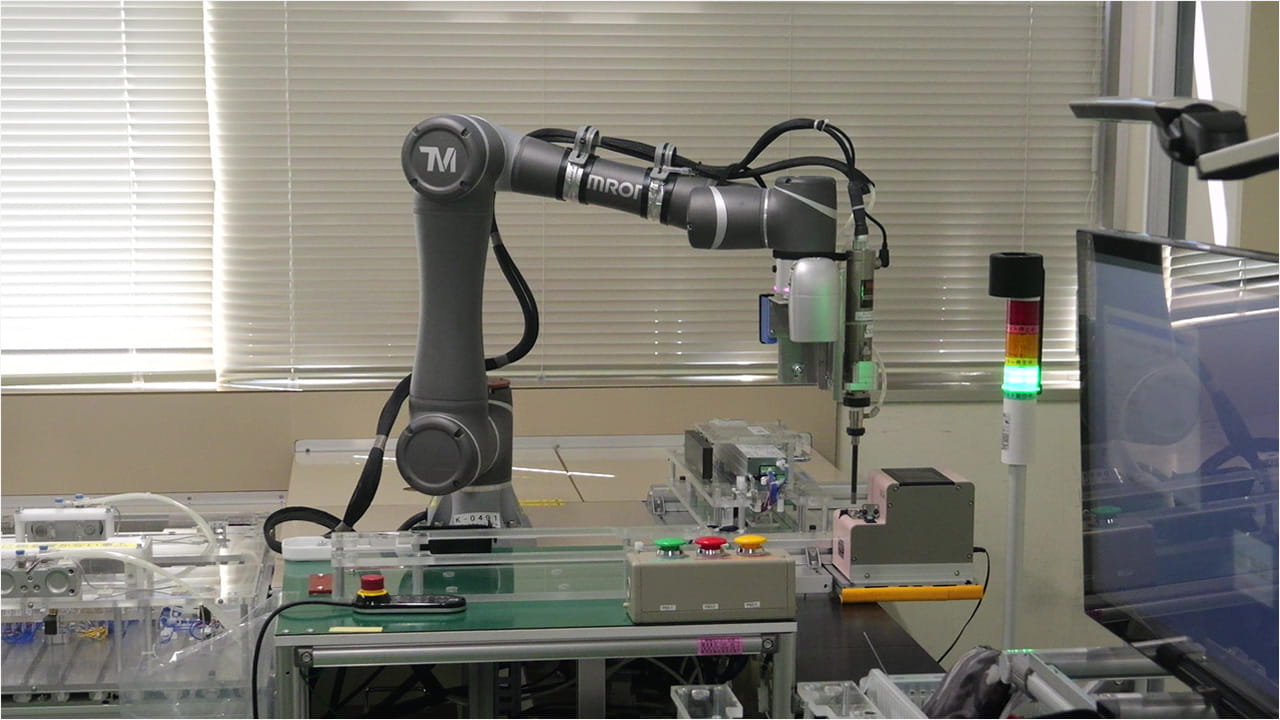
協調ロボット
人と同じ空間で協調し、安全柵なしで使える安全性
標準搭載カメラと直感的ツールで、多様な作業に柔軟かつ簡単に対応


ロボットハンド/オプション













協調ロボットの活用ガイド・事例
すべて見る

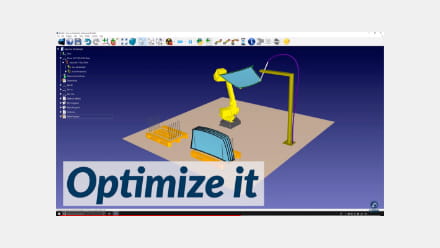
協調ロボットによるパレタイジング作業の自動化
協調ロボットによるパレタイジングシステムの特長、導入から安全稼働にむけた参考情報をご案内
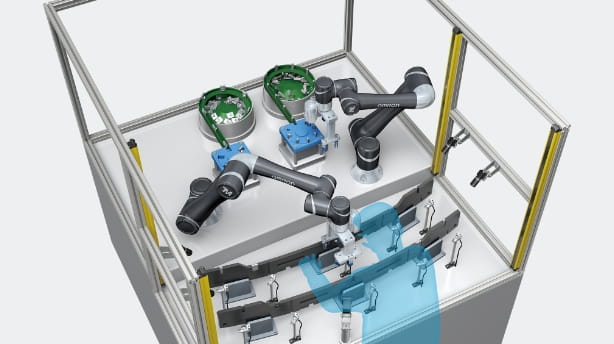
導入事例:株式会社ナム様
金属及び樹脂クリップの組付け作業を自動化
2台の協調ロボットで組付け作業を自動化し、サイクルタイムの短縮と生産品質の向上を両立
協調ロボットのセミナ情報

協調ロボットの
よくあるご質問
すべて見る
ロボットの導入サポート
検討から課題解決まで一貫してサポート。導入後のアフターケアもお任せください
