協調ロボットの
動画一覧
導入事例
導入事例:旭光電機株式会社様
限られた生産リソースを最大限に活用。生産人員削減と生産性アップを実現
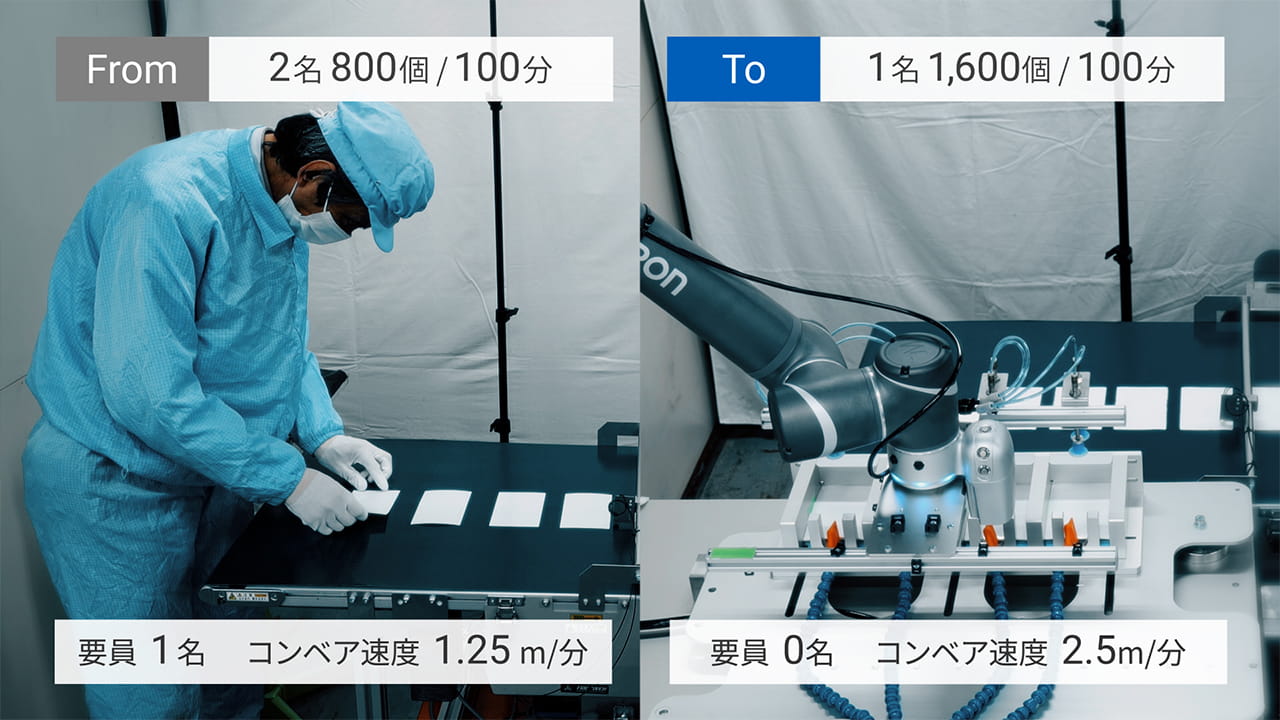
2人持ちU字セルラインを1人持ちに変えた協調ロボット

導入事例:REITEC様
FMCG製造顧客のニーズに焦点を当てたフレキシブル協調ロボットパレタイザー
導入事例:FlexLink AB様
多品種、少量梱包に最適な出荷工程 生産ライン最終端のパレタイジング
スウェーデンに本社を置くFlexLink AB様が開発した協調ロボットパレタイジングシステムの事例です。顧客の自働化ニーズに応えるパレタイザーを提案しています。
導入事例:Hanover Displays Ltd.様
既存検査装置のままダークファクトリーを具現化
2年で投資回収する協調ロボット

導入事例:Cisel s.r.l.様
基板の絶縁テスターを最大効率で運用する協調ロボットマシンテンディング
導入事例:Leica Geosystems AG様
1台の協調ロボットで樹脂充填と製品搬送を自動化し、作業環境の改善と増産課題を同時に解決

導入事例:Reeco Automation Ltd.様
設置から5分で稼働開始
現場で使いこなせる協調ロボットパレタイザー
フットプリントが小さく(従来比40%)、移設自在なパレタイジングシステムの事例です。

導入事例:LITMAT S.p.A.様
人に代わってマグネットを接着
接着剤を充填しながら外観検査を実践する協調ロボット

導入事例:株式会社ナム様
成形機マシンタクトに応じたクリップ組付けを自動化 人と機械が協調する組立工程のロボット実用化事例
SIer協会に加盟の株式会社ナム様による協調ロボット組立工程の自動化事例です。

導入事例:Bluengineering srl 様
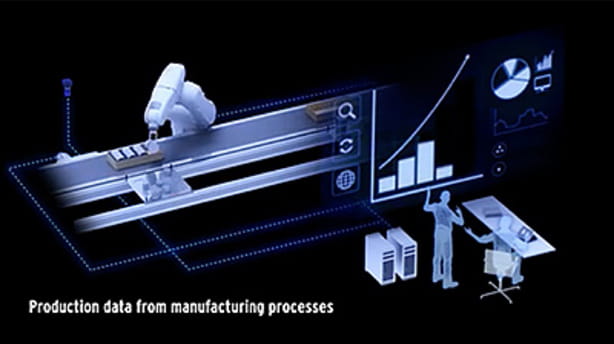
Industry4.0時代のフレキシブル生産を支える
協調ロボットのラベル貼り
導入事例:家庭用理美容器メーカ様
シングル段取り替えと生産品質向上を実現する
人と機械が協調した製品組立て工程

導入事例:株式会社ホリゾン様
製本機へのワーク投入工程を自動化し、オペレータ1名を専従作業から解放
開発マネージャーが語るオムロンの協調ロボット選定理由
導入事例:大成ラミネーター株式会社様
設備や部品を変えることなくラミネート加工現場を進化
省人化1名・生産性2倍を自社現場で実証
導入事例:株式会社有川製作所様
2台の協調ロボットを導入し、プレス機への製品セットと取り出し作業を自動化
ロボットシステムの内製化により、社内の技術人材を育成
導入事例:Fischer Gears社様
協調ロボットを工作機へのマシンテンディングに採用
“ランドマーク”の活用で移設しての使用に対応

導入事例:聖徳ゼロテック株式会社様
危険で単調な製品セット&完成品取り出し作業を自動化。人手作業から作業員を解放し、生産数の安定化を実現

導入事例:オムロン上海有限公司
多品種少量生産の現場で生産性の向上と投資回収期間の短縮を実現
デモ動画

慢性的な人手不足を解消するフレキシブルなロボットによる移載
協調ロボットTM25Sを活用したAMRへのFOUP移載デモ

JISパレットに対応した協調ロボットパレタイジング
導入容易なアプリケーションモデル
既存スペースを活かしたパレタイズ自動化により重労働から人を解放
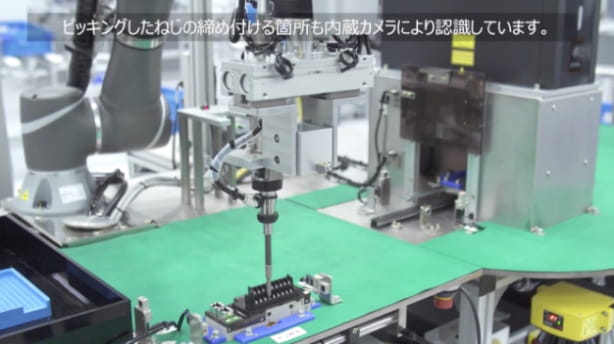
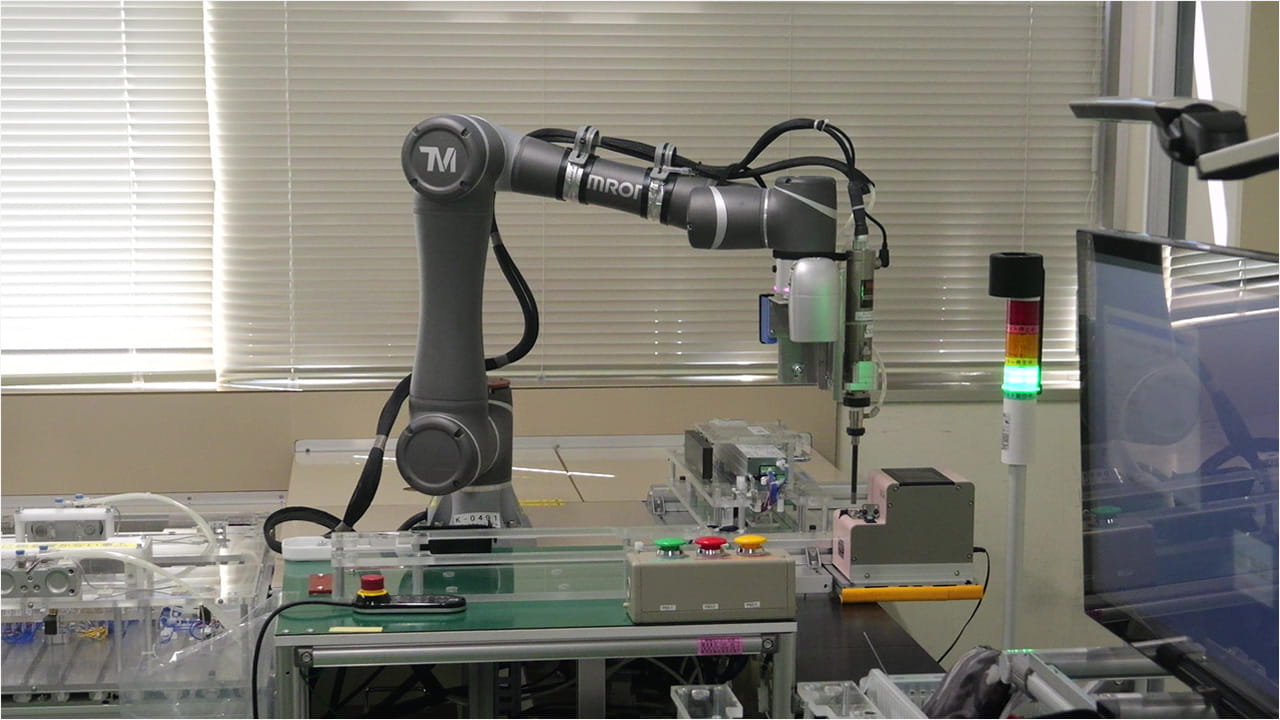
標準搭載のカメラがネジの位置を正確に認識、ネジ締め工程の品質を均一化
協調ロボットによるネジ締め作業の自動化

人と機械が同じ環境で安全に協業生産。協調ロボットによる生産ラインの省力化
人と協業する生産ラインでのネジ締めと製品ハンドリングの自動化

人と協働しておこなう荷積み・荷降ろし作業(パレタイザー)の自動化
協調ロボットを活用した既存スペースのまま導入できる安全でコンパクトな荷積み・荷降ろし作業の自動化をご提案します。

工作機への部品供給と取り出し作業の“マシンテンディング”の自動化
工作機や旋盤・プレス加工機等にワークを設置する作業を協調ロボットで自動化。

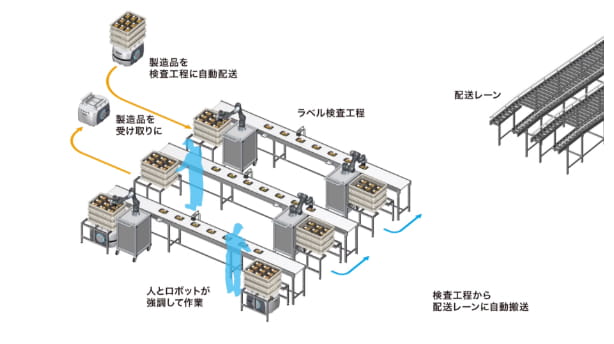
「人手不足」の課題解決。人と協調ロボットが協働する食品検査工程
協調ロボットが作業者と同じ空間で惣菜容器を番重詰め[FOOMA JAPAN 国際食品工業展2019出展]
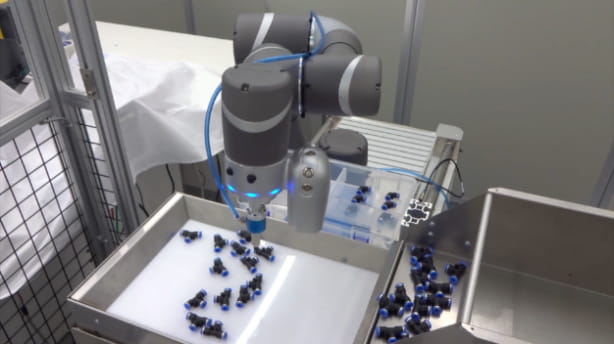
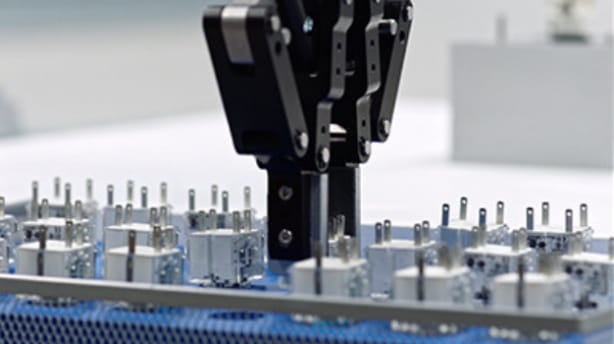
協調ロボットとAnyFeeder(パーツフィーダ)を組み合わせたバラ積み部品の整列
人手に頼らないピッキング作業を協調ロボットとAnyFeederで実現
協調ロボットのビジョンを使った検査と整列~工程ごとの別作業を簡単実現~
短時間での立ち上げと段取り替えを実現、ロボットを移設しても再設定不要で稼働時間の最大化が可能。

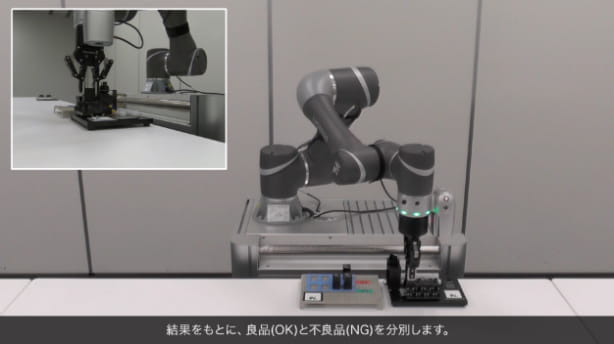
検査機と連動 カメラで視認~仕分け整列。テスト結果をカメラで認識し不良品仕分け
協調ロボットによる検査判定の仕分け処理の自動化を実現できます

協調ロボット 人と同じ空間で働ける安全設計
安全センサと連動、人の接近を検出し動作モードを自動切換え

ビルトインビジョンでリレーのソケット挿入自動化
ビルトインビジョン(標準搭載カメラ)で、ワークのピッキングと組立を簡単に実現とします。
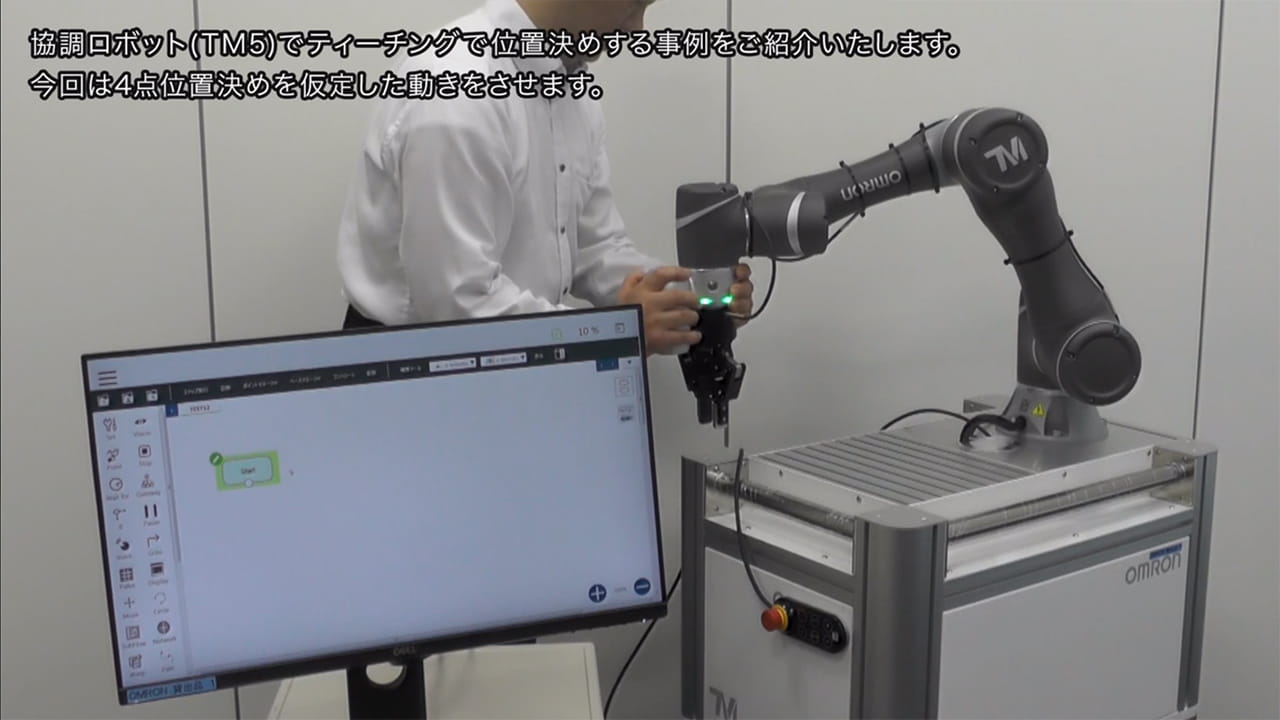
簡単位置決め。ダイレクトティーチング
人の手による操作をロボット動作プログラムに自動変換します
体験動画セミナ

動画セミナ1
開梱と初期設定
協調ロボット TMシリーズの開梱から初期設定を行う方法を説明します。

動画セミナ2
基本動作のプログラミング
この動画では協調ロボット TMシリーズを動かす基本を説明します
動画セミナ3
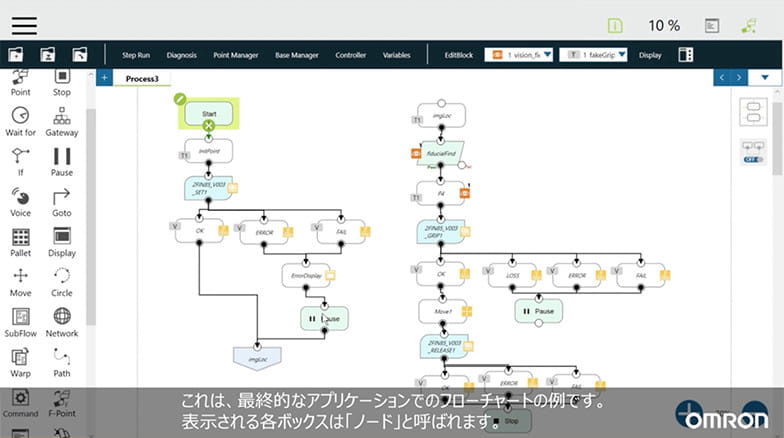
フローチャートを使ったプログラミング
この動画では、“TMflow”というソフトウエアを使用して協調ロボットをプログラミングする方法を説明します。

動画セミナ4
グリッパを取り付ける方法
この動画では、ロボットでグリッパを使用する方法を紹介します。
動画セミナ5
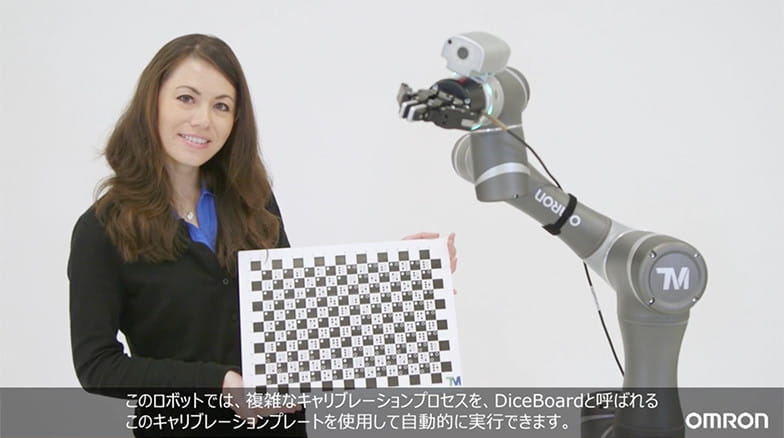
ビジョンキャリブレーションとビジョンノード
この動画では、ビルトインビジョンとビジョンシステムの使用方法を説明します。

動画セミナ6
ビジョンによるピック&プレース
この動画では、カメラとビジョンシステムを利用するアプリケーションでピック&プレース動作を説明します。
動画セミナ7
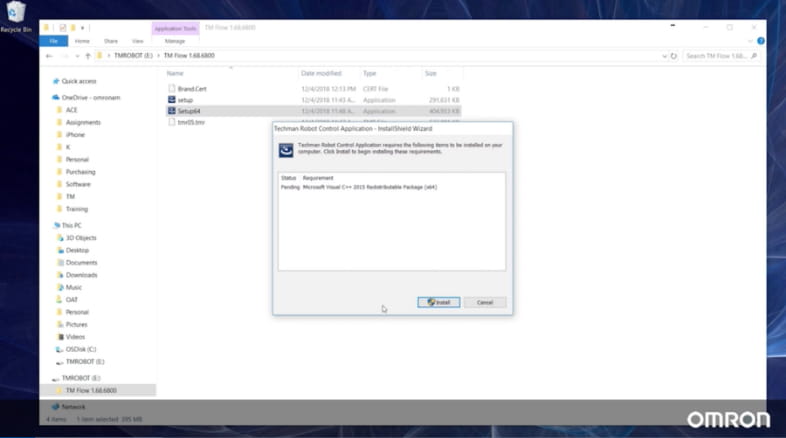
TMflowのアップデート方法
この動画では、コントロールボックスやクライアントPC上のTMflowソフトウェアのアップデート方法を説明します。
動画セミナ8
Modbusを介した通信
この動画では、TMflowでModbus TCP通信を使用する方法を説明します。
動画セミナ9
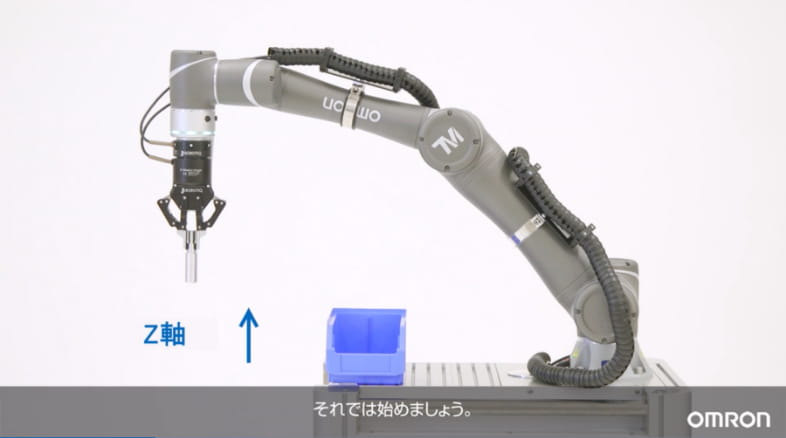
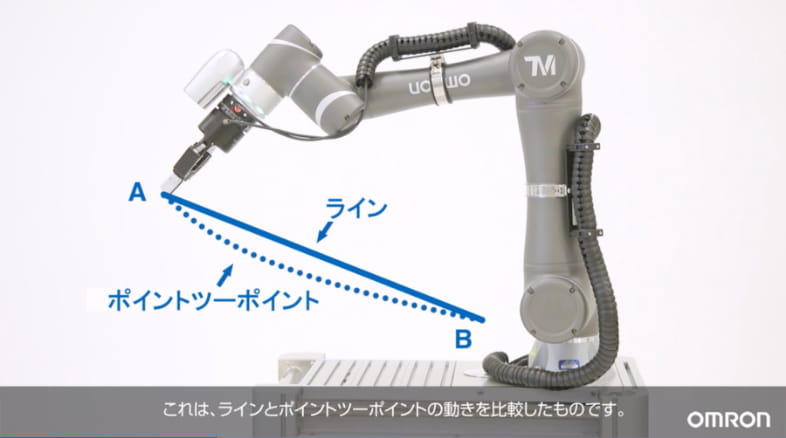
高度な動きの方式
この動画では、さまざまな種類の高度な動きを説明します。協調ロボットがこのような動きをすることで、お客様の用途を実現できます。