基板の絶縁テスターを最大効率で運用する
協調ロボットマシンテンディング
導入事例:
Cisel s.r.l.様
商品名:協調ロボット「TMシリーズ」
搬送 検査 省力化・自動化 情報化
ワーク脱着時間を最小化。生産性と品質向上を両立の協調ロボット
-
1.標準搭載カメラがワーク位置を検出。自動補正しながらワークを整列
-
2.180度回転の取出/投入3個取りハンドが検査サイクル時間を最小化
-
3.最大効率400個/時で所定のテストを実現
イタリアのCisel s.r.l.(以下Cisel社*)が導入した協調ロボットの活用事例です。
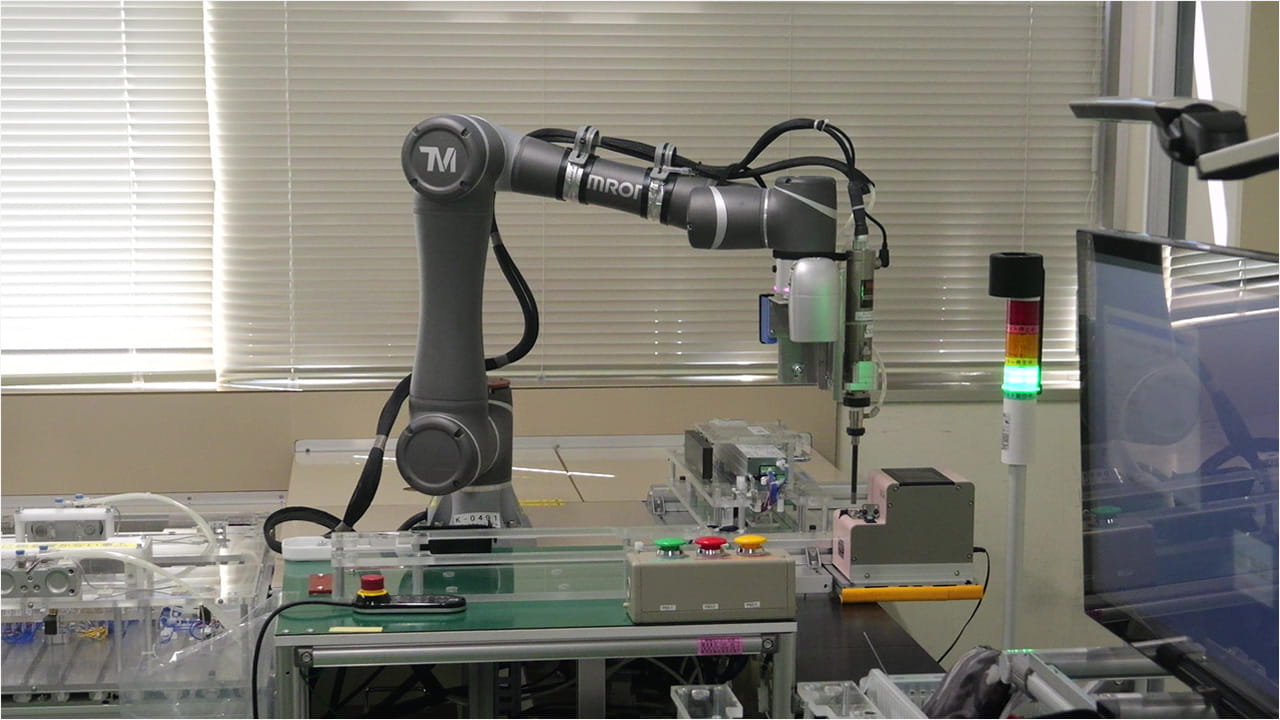
Cisel社は、自動車向けパワーステアリングシステム用基板の通電テスト工程にオムロンの協調ロボットを選択しました。
アプリケーションに使用されるTM5は、これまで人手で1枚ずつ行っていたワークの脱着作業を自動化しました。
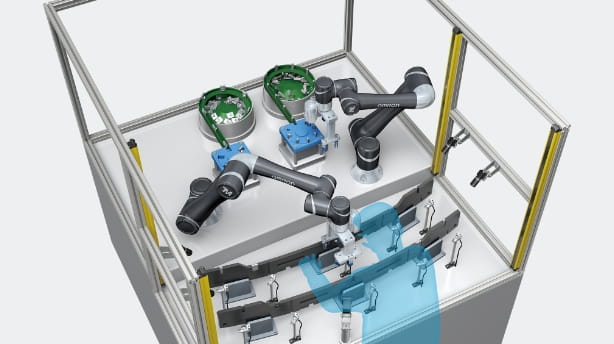
具体的には、協調ロボットがワークを3枚同時にピックアップしテスターに配置します。テスターが絶縁特性を計測した後にロボットがワークを取り出し、計測結果に応じたトレーに並べていきます。
ワークの脱着・配置作業中、標準搭載カメラがワークの位置を検出し、ロボットは補正動作を行います。また、ワークを並べていく中で変化する位置座標もカメラが計測。ロボットは配列位置の変化に追従して整然とワークを配置していきます。
さらに、取出と投入を1サイクルアクションで実行する180度回転機構つきの3個取りハンドにより、1時間あたり400個という従来比最大の効率で所定のテストをおこなえるようになりました。
人に代わって協調ロボットがワーク脱着作業を実行することで、反復作業による人為的ミスを排除(ポカヨケ)することができています。
注「マシンテンディング」
マシンテンディングとは、加工機や装置に対してワーク投入と取り出し作業をすること。
安全柵や囲いの設置など、設備/装置への改造を最小化した導入ができる協調ロボットに最適なアプリケーションです。
*1976年に設立されたイタリアのCisel社は、高品質でハイテクなプリント基板の設計と製造のリーディングカンパニーです。
新着動画協調ロボットの動画をすべて見る


協調ロボットの
資料ダウンロードダウンロード資料をすべて見る


協調ロボットによるパレタイジング作業の自動化
協調ロボットによるパレタイジングシステムの特長、導入から安全稼働にむけた参考情報をご案内
導入事例:株式会社ナム様
金属及び樹脂クリップの組付け作業を自動化
2台の協調ロボットで組付け作業を自動化し、サイクルタイムの短縮と生産品質の向上を両立