複雑化・短期化
商品の多様化やライフサイクル短期化により、生産設備開発が複雑化、短期化している。
技術者不足
世界レベルの労働者不足と人件費高騰により技術者の確保が難しくなっている。

商品の多様化やライフサイクル短期化により、生産設備開発が複雑化、短期化している。
世界レベルの労働者不足と人件費高騰により技術者の確保が難しくなっている。
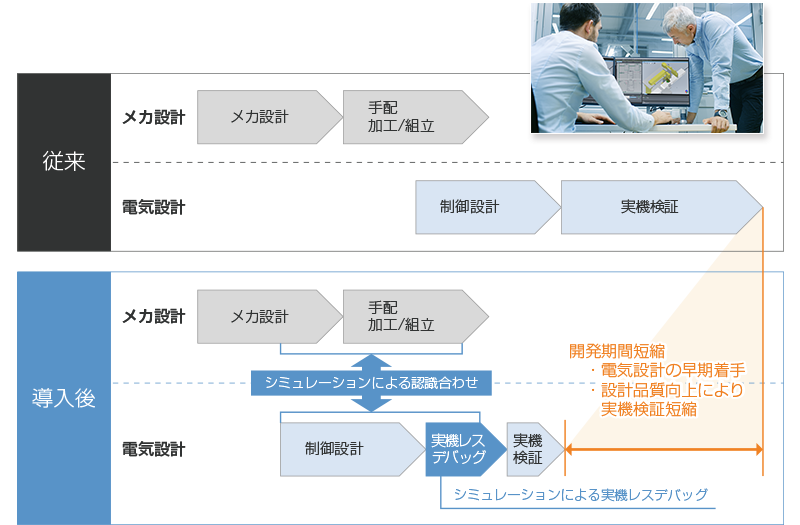
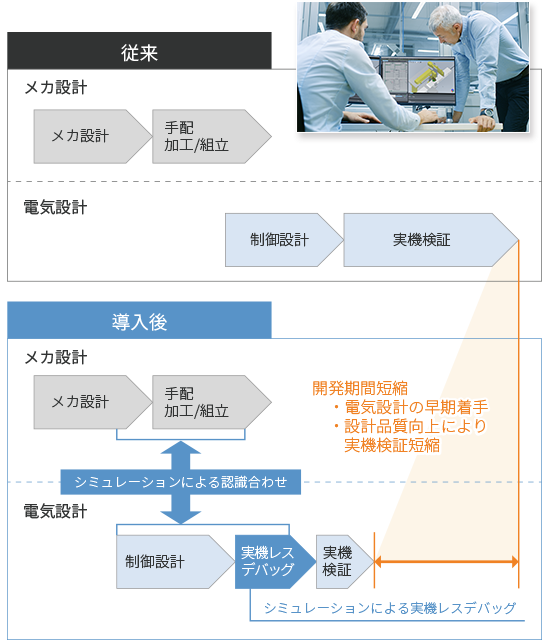
メカ設計の動作仕様設計完了後に制御プログラムを作成し、机上デバッグを行ったにもかかわらず、実機検証時に仕様どおり動作しないことが発覚し、設計の後戻りが発生する。
動作仕様設計が不十分なまま開発を進めた結果、開発の途中で仕様の追加や変更が頻繁に発生し、開発期間が延びる。
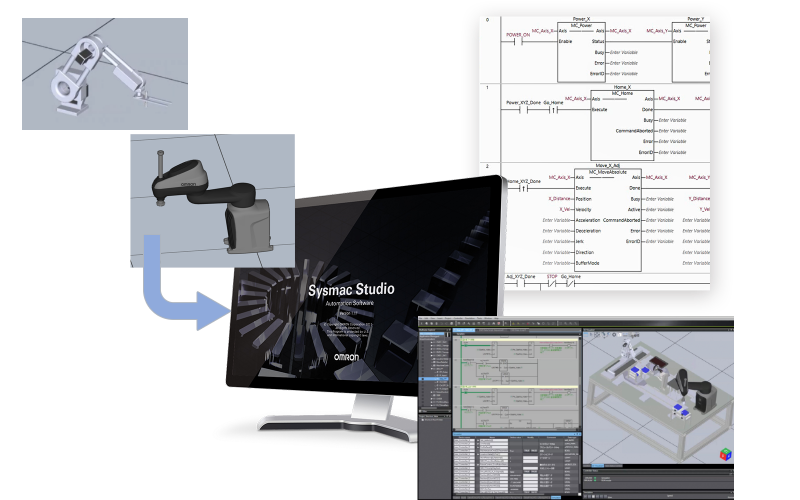
設備開発時に、作成した制御プログラムの動作をすぐに仮想環境上で確認し、検証することができます。設計段階でプログラムの精度を高めることできるため、実機検証時の後戻りを低減し、開発期間を短縮できます。
工程設計時の実現性検証や、メカ設計者と電気設計者の動作設計の際の認識合わせなどに活用することで、開発上流での設計品質を向上させ、お客様の設備開発効率を大幅に向上させることができます。
3DCADデータ
高価なCADソフトをインストールする必要がなく、導入コストが削減できます。
*3DCADデータはSTEP/IGESをサポートしています。

Pick&Place装置のシミュレーションを例に1分13秒でご紹介します。
これまで3Dシミュレーションでワークの動きを作るには、シェイプスクリプトでのプログラミングが必要でしたが、設定を行うだけで設備内でのワークの動きが実現できるようになりました。
| 動作設定種類 | イメージ | 説明 |
|---|---|---|
| 生成 |  |
ワークとしての3D形状データを、任意の場所に生成します。 |
| 消去 |  |
任意の場所でワークを消去します。 |
| 把持 |  |
ロボットハンドなどでワークを掴んだり、離したりする状態を作ります。 |
| 搬送 |  |
コンベア上をワークが流れるような状態を作ります。 |
| 押出 |  |
シリンダ等でワークを押す状態を作ります。 |
| センサ |  |
センサでワークを検出した状態を作ります。 (ON/OFF状態がラダープログラムに反映されます) |
| 物理シミュレーション |  |
ワークが落下したり、滑り台を落ちる状態を作ります。 |
これまで3Dシミュレーションの対象であったメカニカル機構に加え、カスタムメカニカル機構、パラレルリンク機構も可能となりました。
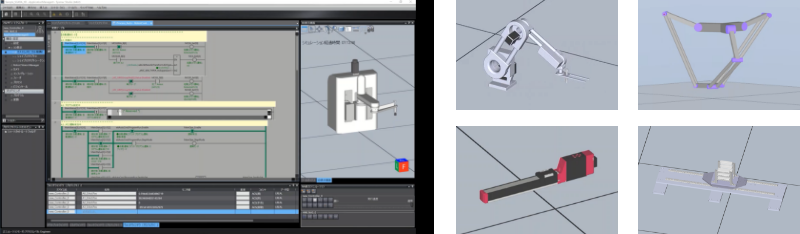
【カスタムメカニカル機構で実現可能な機構】
電動シリンダ
電動チャック
エアチャック
カスタムロボット(パラレルリンク機構、シリアルリンク機構)
カスタムメカ(直動/回転動作の複合機構)
3DCADを使用したシミュレーションのセッティングが、ウィザード形式により、CADメーカソフトよりも圧倒的に簡単なオペレーションで設定できます。

機構を追加しシミュレーションするための設定方法を例に1分05秒でご紹介します。
OpenUSDファイルを使用し3Dデータを簡単に再利用できます。
OpenUSDファイルを使用しシミュレーションするための方法を例に1分14秒でご紹介します。
センサやソレノイド(シリンダ、チャック)であっても、シミュレーション専用プログラムを作成する必要がなく、3Dシミュレーションのセッティング時間を大幅に短縮できます。
ワーク検出用センサの設定を例に1分17秒でご紹介します。
Sysmacは、オムロン株式会社製FA機器製品の日本及びその他の国における商標または登録商標です。
inCAD LibraryのCADデータは株式会社ミスミの許可を得て使用しています。
CADデータに含まれる一切の情報の著作権は株式会社ミスミまたは株式会社ミスミの取り扱いメーカーに帰属します。
株式会社ミスミは部品を組合わせての販売は実施しておりません。また、部品を組合わせた場合の品質・正確性・機能・安全性・信頼性等は一切保証いたしません。
スクリーンショットはマイクロソフトの許可を得て使用しています。
使用している製品写真や図にはイメージ画像が含まれており、実物とは異なる場合があります。