協調ロボットとAnyFeeder*(パーツフィーダ)を
組み合わせたバラ積み部品の整列
商品名:協調ロボット「TMシリーズ」&AnyFeeder
検査・確認 省力化・自働化 タクトタイム短縮 効率化(業務・作業)
人手に頼らないピッキング作業を協調ロボットとAnyFeeder*で実現
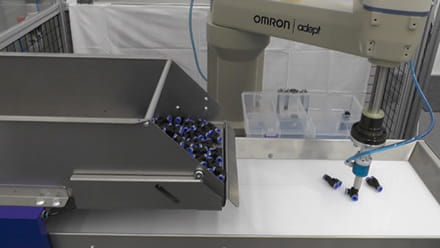
- 1.AnyFeederが供給した部品を協調ロボットが判別
- 2.部品をピックし、指定の位置に整列して配置
- 3. AnyFeederはアタッチメントなしに多品種部品に対応
協調ロボット「TMシリーズ」は、パーツフィーダ「AnyFeeder」との連携で、バラ積みされた部品を判別し、指定された処理を行うことが可能です。
従来の人手によるバラ積み部品のピッキングは単調ながらも集中力が要求され、人手の確保が困難な作業でした。TMシリーズとAnyFeederとの組み合わせは、こうした作業をロボットが代替します。
一般的なボウル振動型パーツフィーダでは、ワークの形状ごとに設計したアタッチメントや発振体、直進フィーダなどが必要ですが、AnyFeederは、TMシリーズからの指示により「反転」「前進」「後退」の動作で部品をバラします。バラされた部品はTMシリーズが標準搭載するカメラで向きや裏表を認識し、ピックしての整列作業を行います。そのためフィーダ側での整列処理は不要で、部品が詰まるなどの工程停止は発生しません。
* 2025/03 受注終了 推奨代替商品(フレキシブルパーツフィーダ iPFシリーズ)
新着動画協調ロボットの動画をすべて見る


協調ロボットの
資料ダウンロードダウンロード資料をすべて見る


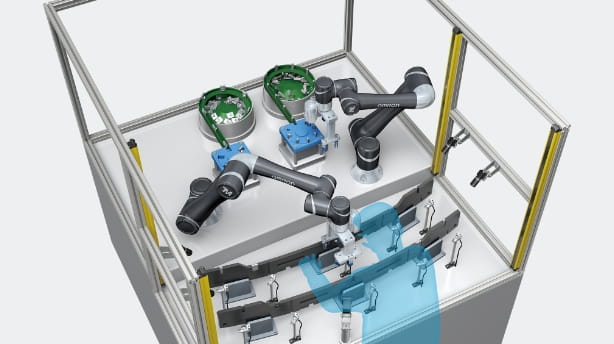
協調ロボットによるパレタイジング作業の自動化
協調ロボットによるパレタイジングシステムの特長、導入から安全稼働にむけた参考情報をご案内
導入事例:株式会社ナム様
金属及び樹脂クリップの組付け作業を自動化
2台の協調ロボットで組付け作業を自動化し、サイクルタイムの短縮と生産品質の向上を両立