協調ロボット 人と同じ空間で働ける安全設計
商品名:協調ロボット「TMシリーズ」
組立 安全化
安全センサと連動、人の接近を検出し動作モードを自動切換え
- 1.セーフティライトカーテンとの連動により、人がいない環境では高速モードで稼働
- 2.セーフティライトカーテンがエリア侵入を感知すると自動的に協調モードへ変更
- 3.協調ロボットが人や物の接触も検知し、安全停止
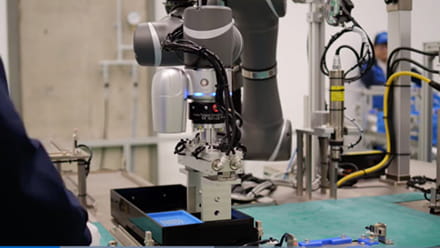
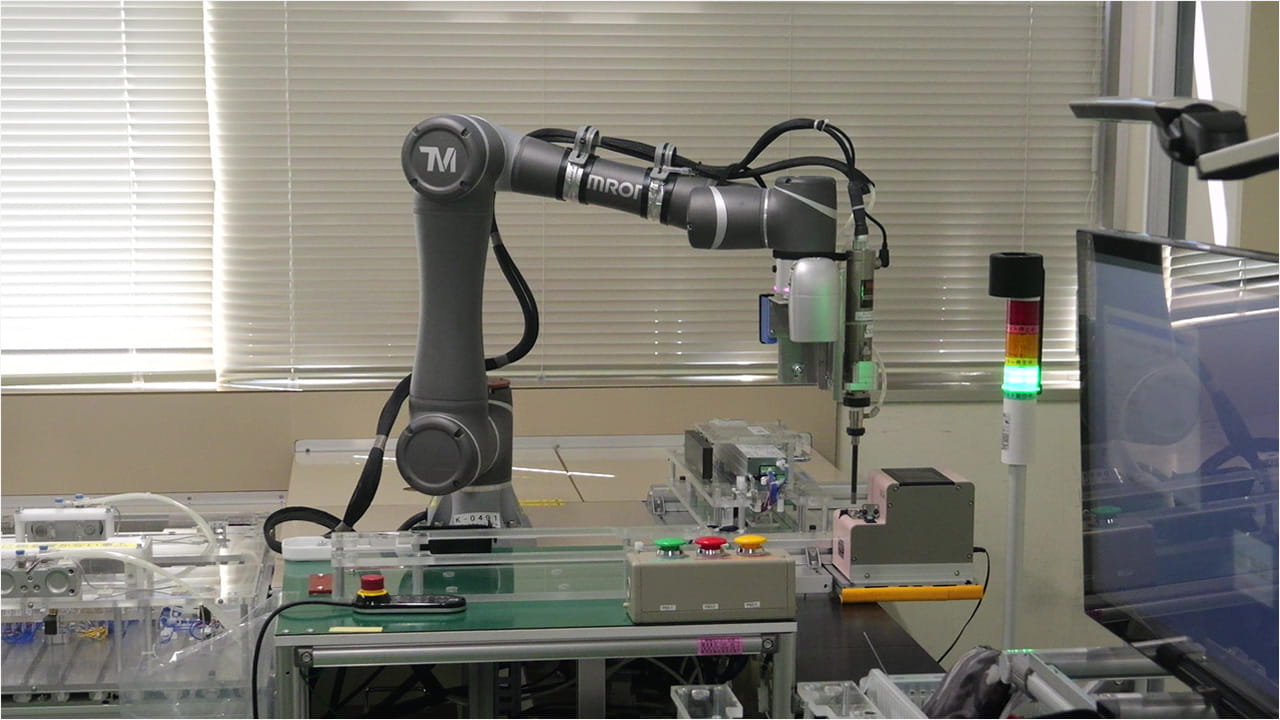
協調ロボット「TMシリーズ」は、人がいない環境では高速の「非協調モード」で稼働し、生産性を最大限に高めます。しかし、人の接近を感知すると自動的に低速の「協調モード」へと移行します。人との混在が発生する生産現場でも、安全な稼働が可能です。動画ではロボットとセーフティライトカーテンを接続して、ロボットエリア内への侵入を検出しています。通常は高速で稼働するロボットですが、人の手がセーフティライトカーテンの範囲内に入ると自動的に低速の「協調モード」での運転を開始。人の手が範囲から離れると、高速の「非協調モード」に復帰します。
さらにロボットのアームに人や物が触れると、ロボットはトルクの変化を検知。すみやかに安全停止します。
注1. 労働安全衛生規則第36条31号および32号において、産業用ロボットの教示等を行う作業や検査、修理、調整等を行う作業は、労働安全衛生法で定める「危険又は有害な業務」に該当します。
労働安全衛生法第59条により、事業者は労働者に対し「安全又は衛生のための特別の教育」を行う義務があります。お客様の責任において、リスクアセスメントの結果から適切な安全対策を実施してくださるよう、お願いします。
新着動画協調ロボットの動画をすべて見る


協調ロボットの
資料ダウンロードダウンロード資料をすべて見る


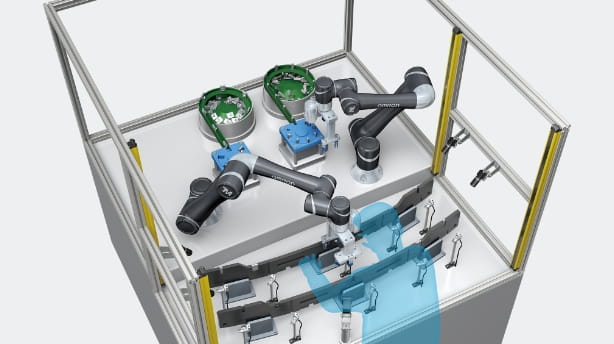
協調ロボットによるパレタイジング作業の自動化
協調ロボットによるパレタイジングシステムの特長、導入から安全稼働にむけた参考情報をご案内
導入事例:株式会社ナム様
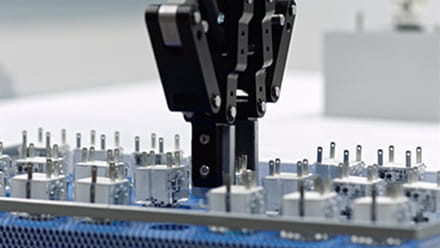
金属及び樹脂クリップの組付け作業を自動化
2台の協調ロボットで組付け作業を自動化し、サイクルタイムの短縮と生産品質の向上を両立