簡単位置決め ダイレクトティーチング
商品名:協調ロボット「TMシリーズ」
保守・メンテ 使い方
人の手による操作をロボット動作プログラムに自動変換します
- 1.アームを直接動かした軌跡をプログラムに自動変換
- 2.「フリーボタン」を押してからロボットを操作
- 3.位置決めしたい場所は「ポイントボタン」を押すだけ
- 4.作業内容変更、配置変換にもスムーズに対応
協調ロボット「TMシリーズ」は、ロボットのアームを手で動かす「ダイレクトティーチング」により、直感的な動作設定が可能です。
カメラ部分には「フリーボタン」と「ポイントボタン」があり、フリーボタンを押すとロボットのアームを自由に動かすことができます。パワーアシストの機能により、動かすために大きな力は不要です。また必要に応じ動作軸を固定する機能により、位置決めがより容易になっています。
アームを位置決めしたい場所でポイントボタンを押せば、その情報がプログラミングソフト「TMflow」に送られます。この作業を必要に応じて繰り返すことで、TMflow上でフローチャートが自動的に描かれ、プログラムに変換されます。プログラムを設計するための知識の習得や、座標軸の設定などは不要です。
この「ダイレクトティーチング」により、作業内容の変更、配置変換にも時間や工数をかけることなく対応することができます。
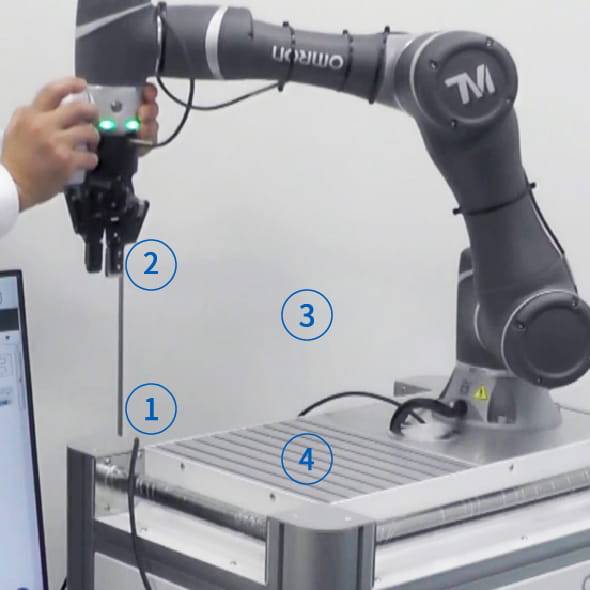

- フリーボタン:押すとロボットアームが動かせます。(パワーアシスト有り)
- ポイントボタン:位置決めしたい位置を登録します。
新着動画協調ロボットの動画をすべて見る


協調ロボットの
資料ダウンロードダウンロード資料をすべて見る


協調ロボットによるパレタイジング作業の自動化
協調ロボットによるパレタイジングシステムの特長、導入から安全稼働にむけた参考情報をご案内
導入事例:株式会社ナム様
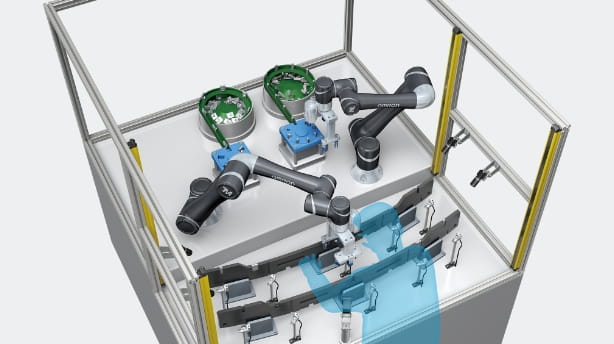
金属及び樹脂クリップの組付け作業を自動化
2台の協調ロボットで組付け作業を自動化し、サイクルタイムの短縮と生産品質の向上を両立