ビルトインビジョンでリレーのソケット挿入自動化
商品名:協調ロボット「TMシリーズ」
組立 省力化・自働化
ビルトインビジョン(標準搭載カメラ)で、
ワークのピッキングと組立を簡単に実現します。
- 1.ロボットが相対的な位置関係を把握してから作業を開始
- 2.ワークが載るパネルを斜めに置いても再設定は不要
- 3.どちらの場合も作業にかかる時間は同一
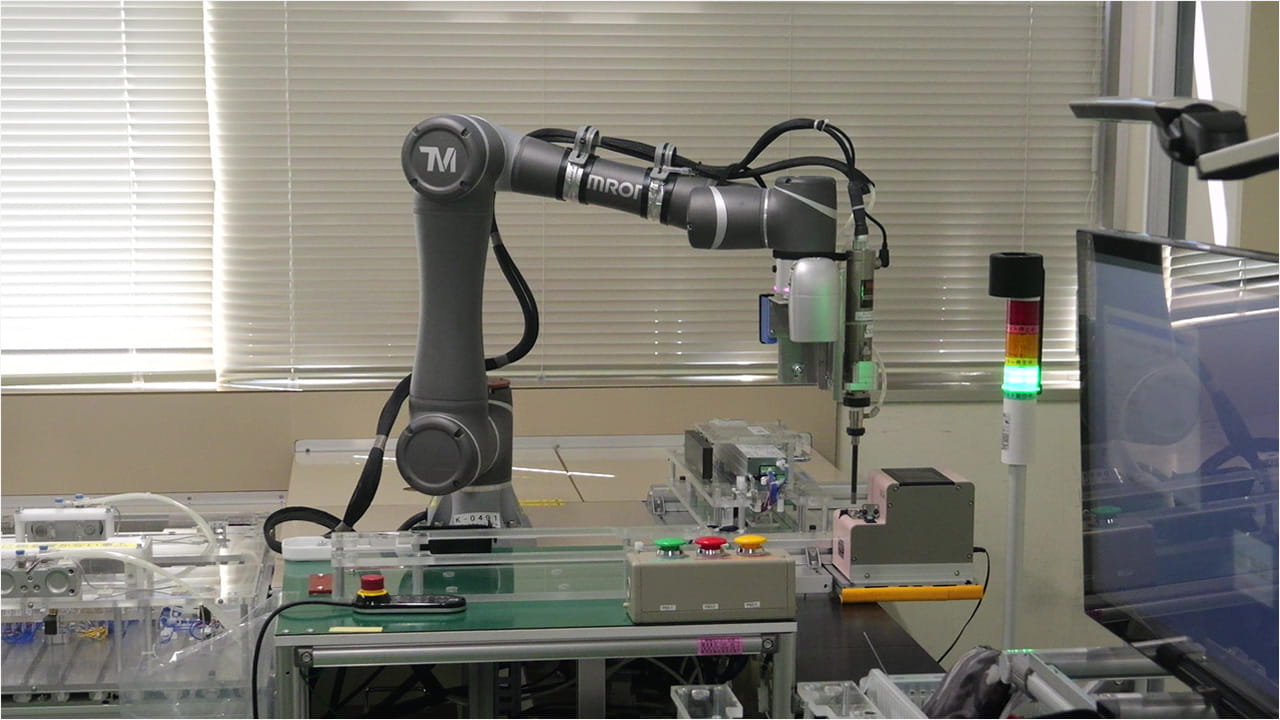
協調ロボット「TMシリーズ」は、作業台に貼付された「TMランドマーク」を標準搭載するカメラで読み取り、ワークとロボットの相対位置を把握します。
動画では最初に作業台に水平に置かれたパネルに対し、ワークをピックアップして挿入する作業を行います。ロボットはまず、カメラでTMランドマークを読み取り、ワークの位置を把握し、作業に入ります。
さらに作業台の上に、パネルをあえて傾斜して配置します。このときもロボットはまずTMランドマークを読み取り、ワークとの立体的な位置関係を計算します。そのため傾斜したパネルからも正確にワークをピックアップし、所定の動作を行います。
こうした機能により、ワークの大まかな位置合わせだけでも、正確な処理が可能です。これによって、ロボットを移設して活用するときも正確な位置決めに時間をとらえることなく、迅速な再稼働を実現します。
新着動画協調ロボットの動画をすべて見る


協調ロボットの
資料ダウンロードダウンロード資料をすべて見る


協調ロボットによるパレタイジング作業の自動化
協調ロボットによるパレタイジングシステムの特長、導入から安全稼働にむけた参考情報をご案内
導入事例:株式会社ナム様
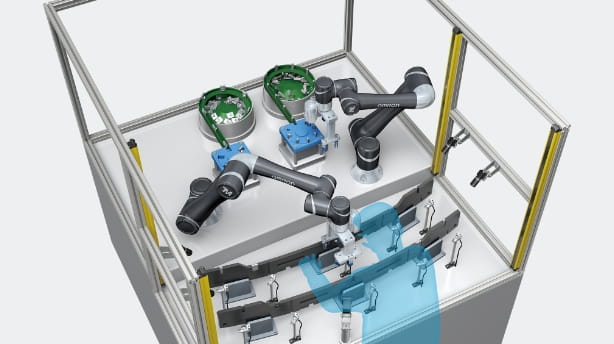
金属及び樹脂クリップの組付け作業を自動化
2台の協調ロボットで組付け作業を自動化し、サイクルタイムの短縮と生産品質の向上を両立


