走行させるだけで周辺環境をスキャンし、
工場内マップを作成
商品名:FLOW統合ツールキット(MobilePlanner)
搬送 設計 保守メンテ
簡単な走行ルート指定でライン変更も容易
- 1.モバイルロボット本体に搭載するレーザスキャナが周辺情報を収集
- 2.走行した軌跡をPCに取り込みマップ作成
- 3.進入禁止エリアも簡単に設定可能
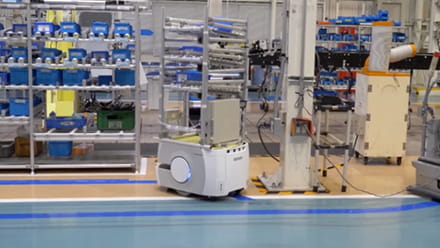
オムロンのモバイルロボットの搬送ルートは、プログラムを覚える必要なく、直感的に設定できます。ロボット本体にジョイスティックをつなぎ、ラジコンカーを動かすように工場内を走らせます。このときロボットは内蔵するレーザスキャナで周辺情報を収集し、マップの基礎になるデータを記録します。走行終了後、ロボットとPCをつなぎ、専用ソフト「MobilePlanner」にデータを読み込むと、PCの画面上にロボットがスキャンした工場内のマップが表示されます。この画面上でスタート地点、ゴール地点の設定や、進入禁止エリアの設定が可能です。
工場内のラインを変更したときも、同様の作業を行うことで、すぐにマップが作成され、ロボットのスムーズな稼働が実現します。AGVのように、ライン変更ごとにガイドテープを貼り直す必要はありません。


モバイルロボットの
資料ダウンロードダウンロード資料をすべて見る

ロボットシステム導入カタログ
(オムロンフィールドエンジニアリング株式会社)
オムロングループならではの、ロボット導入後のメンテナンスサービスや保守契約についてもご理解いただける内容です。

モバイルロボット(AMR)導入までの7つのステップと運用における3つのポイント
搬送の自動化を実現するモバイルロボットの構想から導入までを説明した参考資料をご案内いたします。

導入事例:三機工業株式会社様
自社施工現場の空調性能検査
自律走行型の風量測定ロボット[開発中]により空調性能試験工数を従来比75%削減