

搬送担当者の作業負担を削減
重量ワークの搬送を自動化するモバイルマニピュレータ
システム提供:REALIZE 株式会社
モバイルマニピュレータシステム
ciMoMa-GIANT
特長
-
1. 14kg*対応の協調ロボットを搭載したモバイルロボット
中重量物のワークをハンドリング可能。作業者の搬送負荷を軽減します。協調ロボットの可搬重量12㎏のTM12Mもしくは、可搬重量14kgのTM14Mを搭載したモバイルマニピュレータシステムです。自ら作業の場所を変えて、作業者負担のかかる中重量ワークのハンドリングを実行、搬送を行います。
搬送ワークに応じたハンド/ペイロードをカスタマイズした設計製作も可能です。
* 14kg 対応は協調ロボットTM14Mを搭載したシステムです。
ロボットハンドの重量も含みます。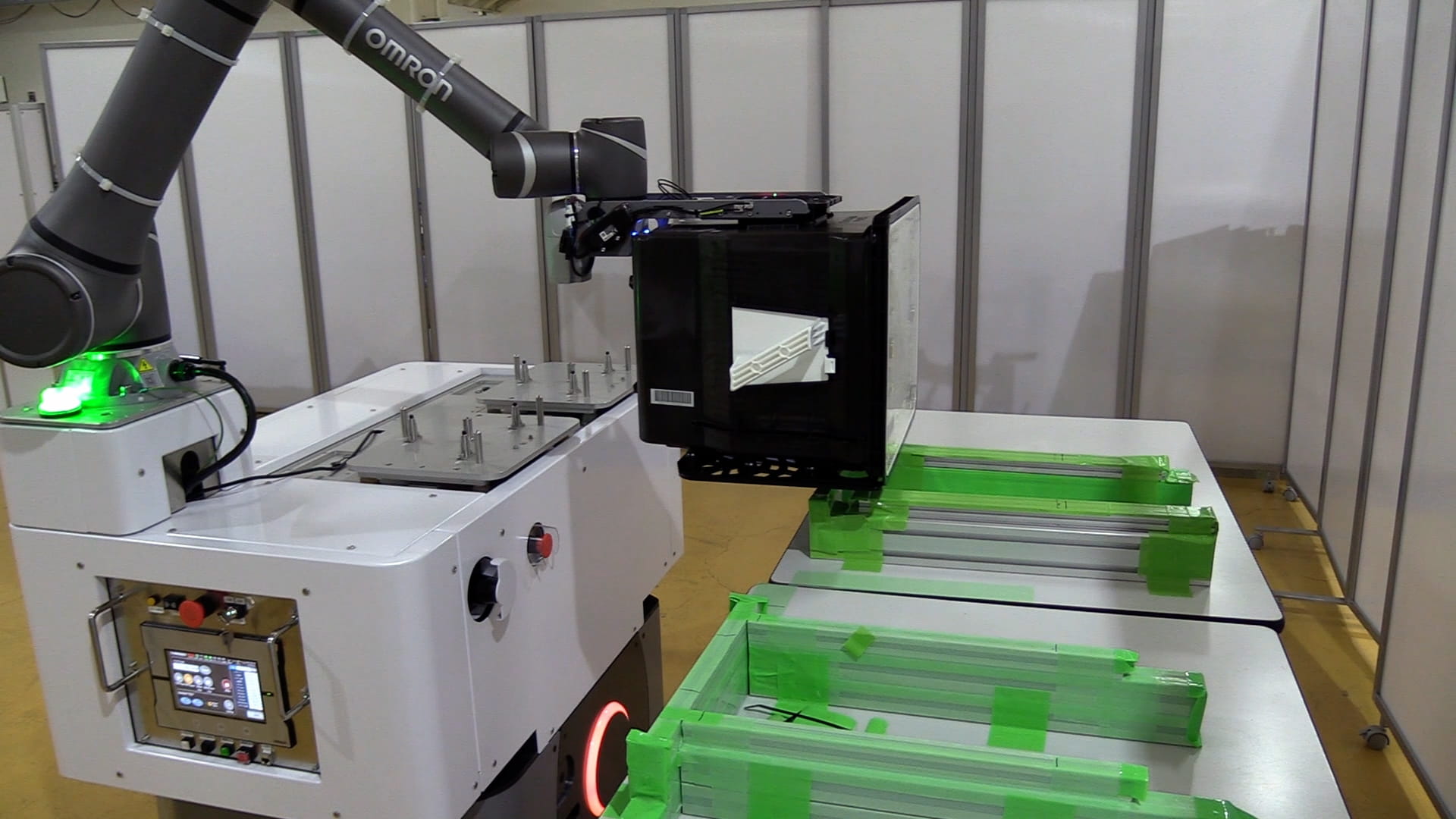
-
2. 上位システムとモバイルマニピュレータの連携ミドルウェアをご用意
上位システムとモバイルマニピュレータを連携させるミドルウェアJOS(Job Ordering System)を用い上位システムからのジョブの発行、稼働状態の監視を行います。
ミドルウェアを使用することで、システム導入設計を短縮化することができ、運行のステータスを可視化するとともにエラーログのファイル蓄積機能を備えています。
モバイルマニピュレータ、モバイルロボットLD、協調ロボットTMなど複数台の進行状態を管理し、上位システムからの稼働指令を適切に振り分けます。
製造現場においても、手元のタブレット端末により稼働状態をリアルタイムでモニタ可能です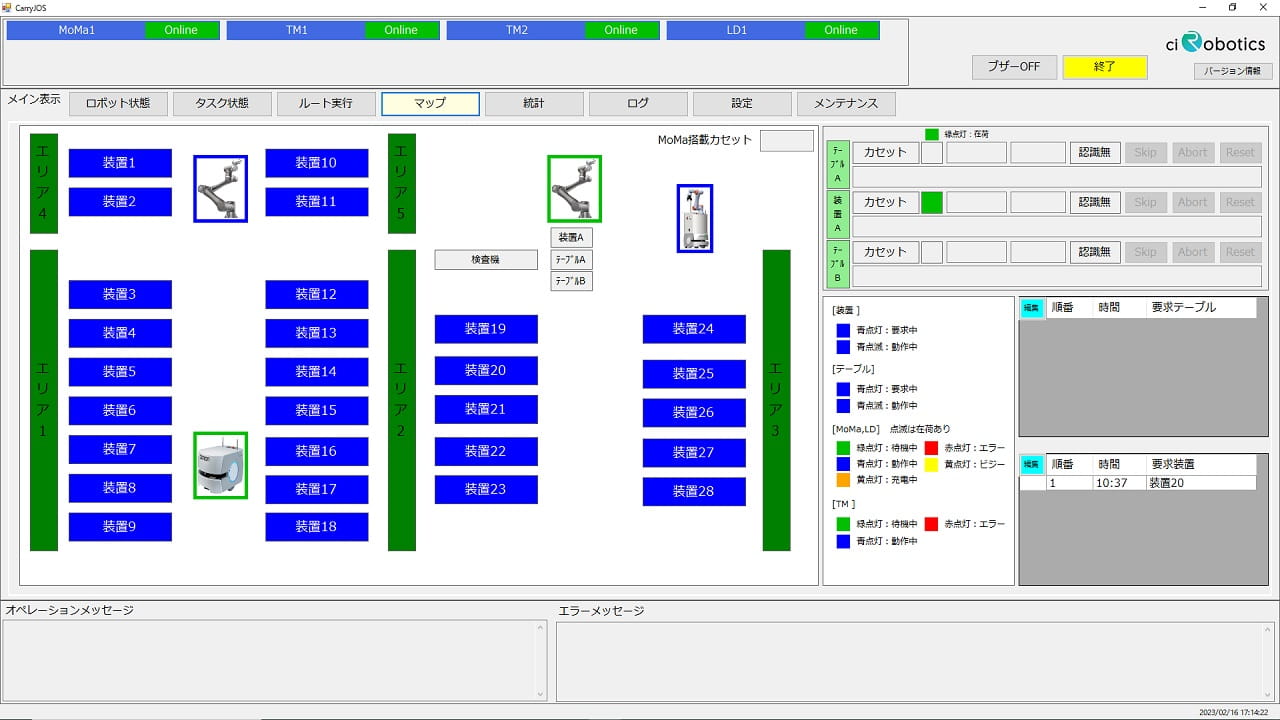

-
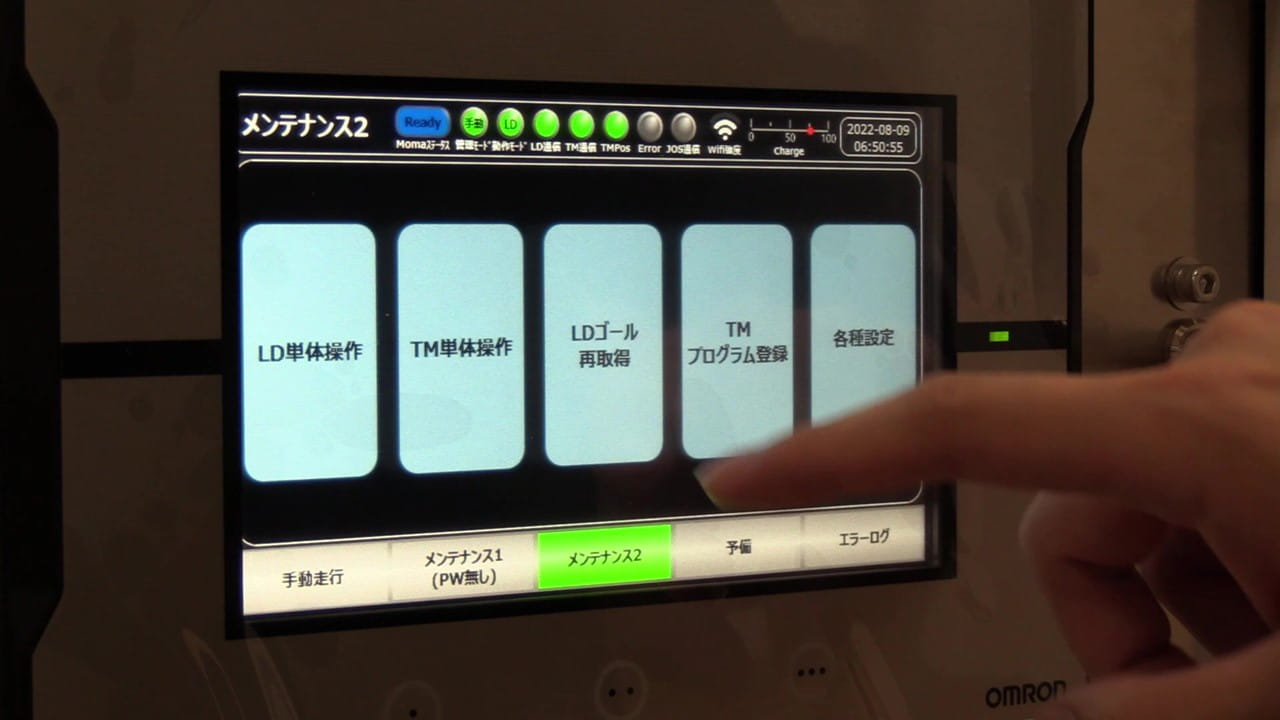
3. モバイルマニピュレータの運用状態が一目でわかる
シンプル操作で使いやすいGUI(タッチパネル)ロボットの状態ステータスをインジケーターランプで確認可能。ステータスはわかりやすく"コメント"でも表示されます。
ジョブ単位をモバイルロボットのゴールと協調ロボットのプログラム実行の組み合わせとして設定。
複数のジョブを組み合わせて実行できるルート機能を搭載。 回数を指定した繰り返し作業も設定可能です。
-
4. ワイヤレス充電システムを採用、アイドルタイムでの追加充電に適応
モバイルマニピュレータの側面にワイヤレス充電システムを設置。
充電端子の接触による銅(金属)粉塵の飛散がないため、クリーン環境で使用することができます。走行経路に充電システムを配置することで、稼働時間のインターバルに、こまめなバッテリー充電が可能です。また、給電システムを受け渡し箇所に取付けることで、アプローチした際にワークの積送、積み下ろしをしながら充電することも可能です。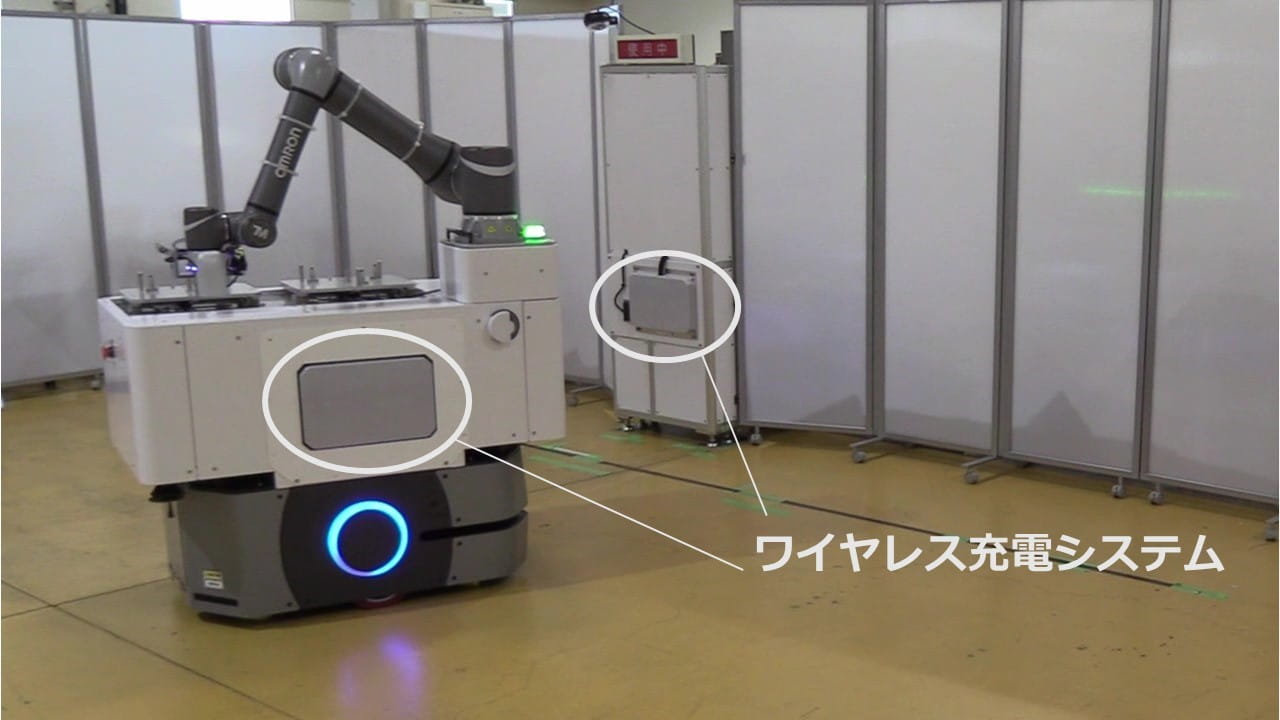

性能一覧
ciMoMa-GIANT
*1:ハンドの質量を含む
| 項目 | モバイルロボット | 協調ロボット | ハンドリングワーク *1 |
積載可能量 | 稼働時間 | 最大移動速度 | 必要通路幅 (1台使用の目安) |
必要通路幅 (2台使用の目安) |
|---|---|---|---|---|---|---|---|---|
| 詳細 | LD-250 | TM12M or TM14M | TM12M: 可搬12kg or TM14M: 可搬14kg |
約40kg | 4h以上 ※満充電からの稼働 LDのバッテリーを使用 |
950mm以上 | 1,600mm以上 | 2,500mm以上 |
*1:ハンドの質量を含む
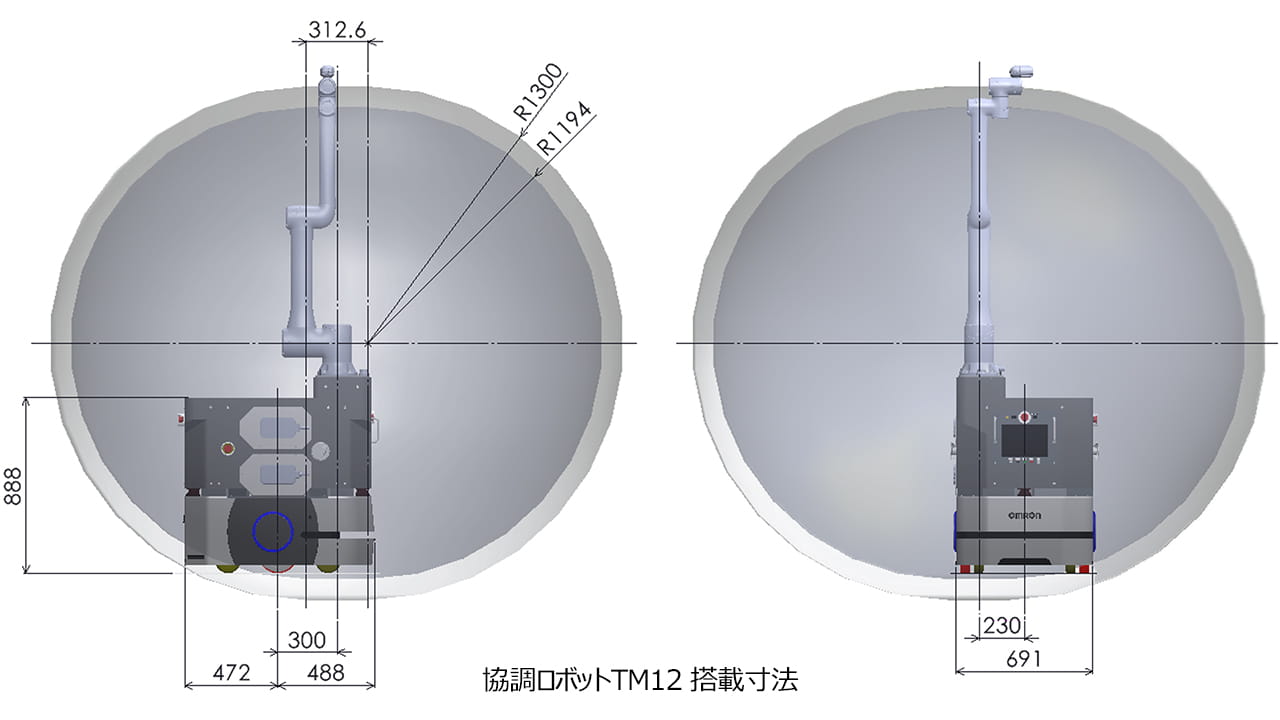
外形寸法
デモ動画
重量ワークの搬送を自動化するモバイルマニピュレータ | 動画提供 REALIZE 株式会社
システム提供元
REALIZE は各種設計から導入先のシステム連携までのすべての工程でお客様のロボット導入をサポートします。
自動化を進めて生産性を上げたい、ロボットを導入して作業員の負担を軽減したいなど、
その他ほんの些細な困りごとでも構いません。是非ご相談ください。
”ちょっと先の未来を創る“をキーワードに安全・安心なロボティクス社会を目指して、皆様と共に歩みを進めてまいります。




