第3章
セットアップ3-1 使用機器
3-1-1 ロボット
本セミナで使用するロボット
TM5-700
モバイルワークステーション
グリッパー
ROBOTIQ社 2F-85

3-1-2 周辺機器
本セミナで使用する周辺機器
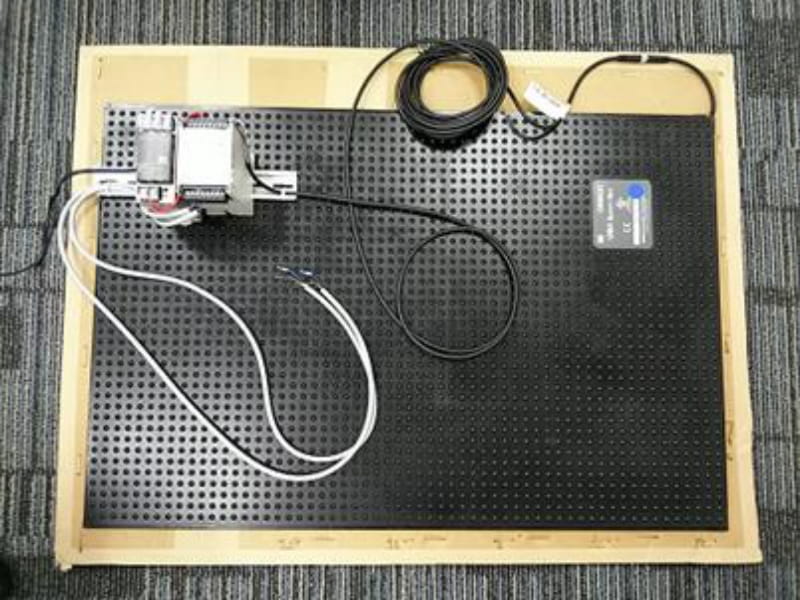
- ・セーフティ機器
- セーフティマット 形UMMA-0750-0500-1
- セーフティコントローラ 形MC3
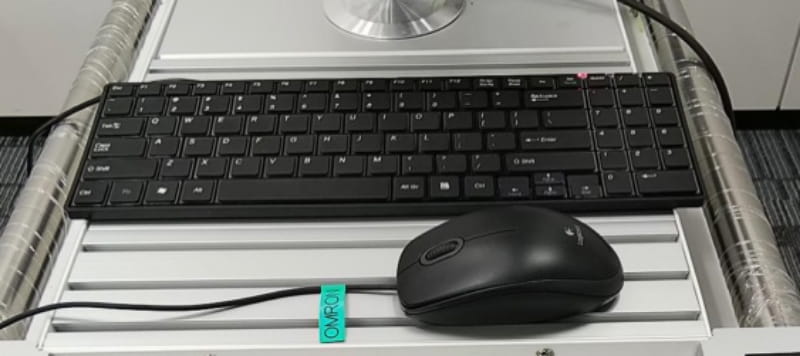
- ・キーボード、マウス
- キーボード:英語配列
- マウス: 2ボタン ホイールあり
- ・I/O入出力、センサ
- フォトマイクロセンサ 形EE-SX772A 2M

- ・TMLandmark、他ワーク(ランプなど)

3-2 セーフティ機器の接続
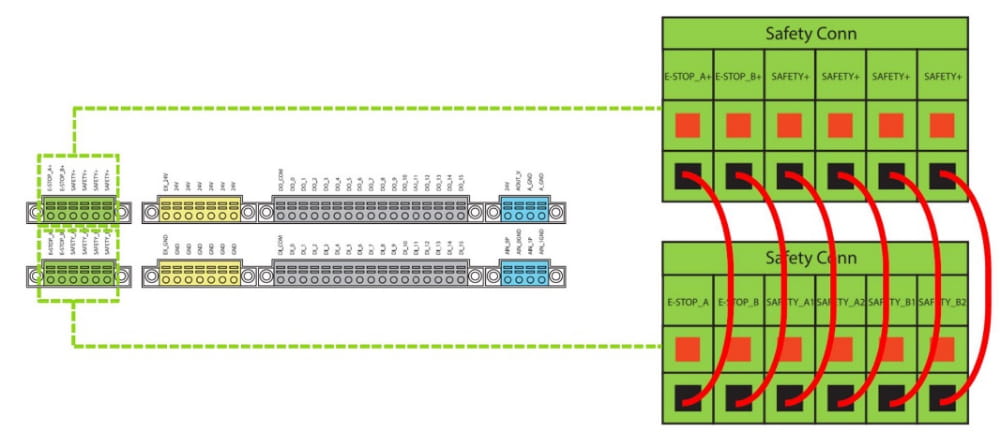
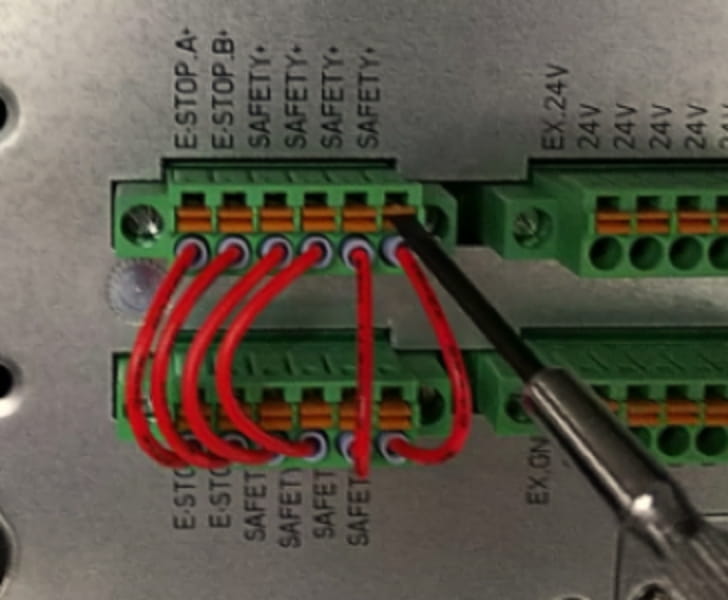
3-2-1 安全コネクター
※ハードウェアには複数のバージョンがあります。(H/W3.0、H/W3.1、H/W3.2)
本研修ではH/W3.0を使用します。
非常停止(E-STOP)用の拡張ポートとセーフガードポートがあります。
- 1.E-STOP(ジャンパ:1&2)
- ノーマリクローズの接点です。E-STOPスイッチが開いていると、ロボットは非常停止状態に移ります。
- 2.セーフガードAポート(ジャンパ:3&4)
- ノーマリクローズの接点です。安全Aスイッチが開いていると、ロボットは一時停止状態に移ります。
- 3.セーフガードBポート(ジャンパ:5&6)
- ノーマリクローズの接点です。安全Bスイッチが開いていると、ロボットは協調モードに移ります。
【H/W3.0】
【H/W3.2】
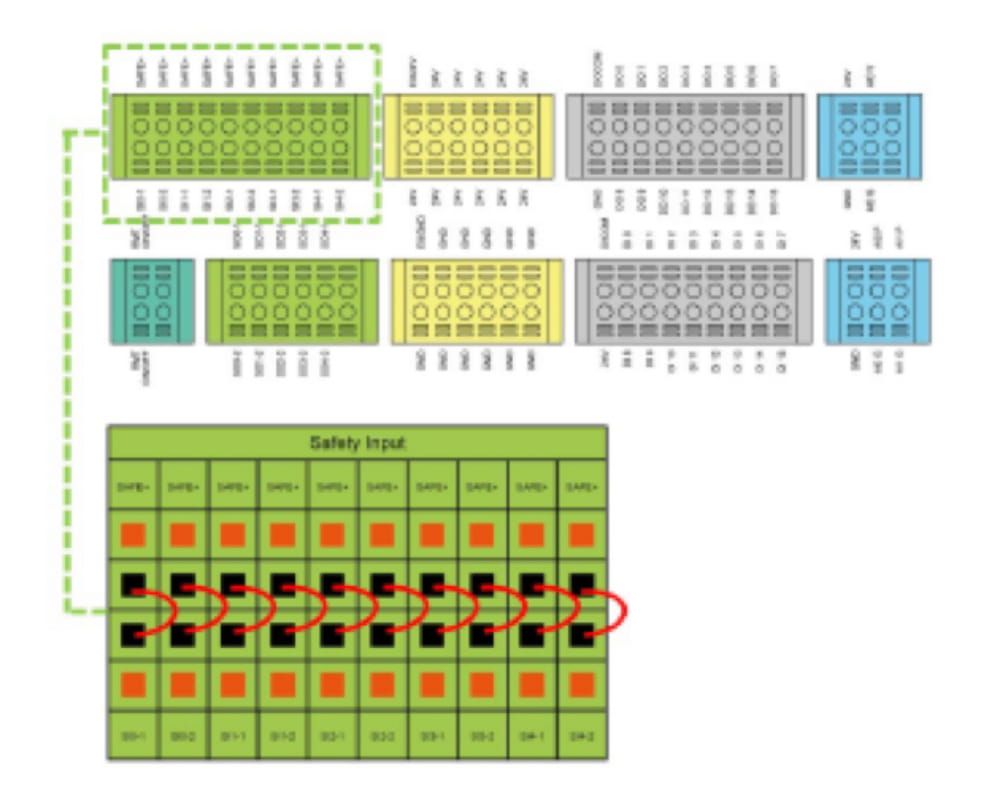
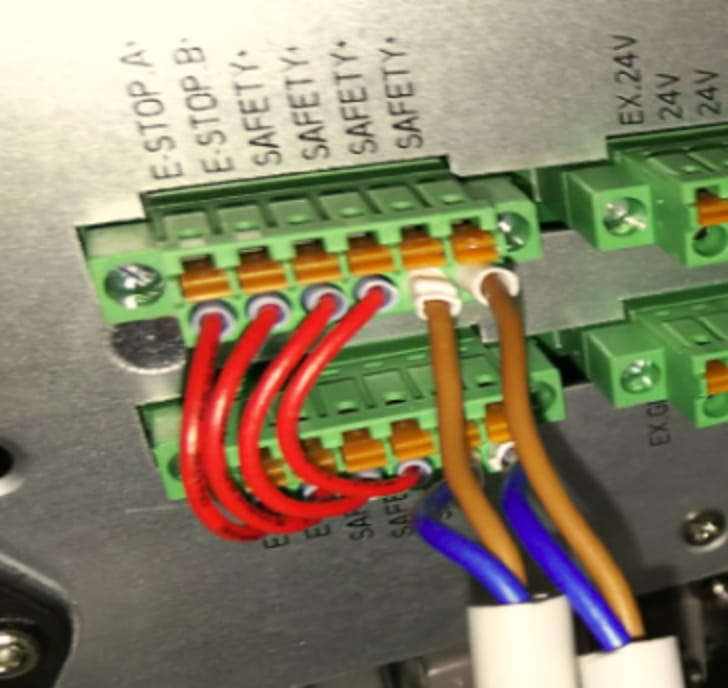
3-2-2 セーフティマットの接続
1.ジャンパ5&6を外します。
精密ドライバ(-)などでオレンジのレバーを押しながら棒端子を抜きます。
2.セーフティマットを接続します。
3-3 ロボットの起動
3-3-1 初回のロボット起動
箱から出したときの初めての起動の場合、次の手順で起動していきます。
ロボットはパッキングポーズになっているので、これをスタートアップの位置・姿勢に変えます。

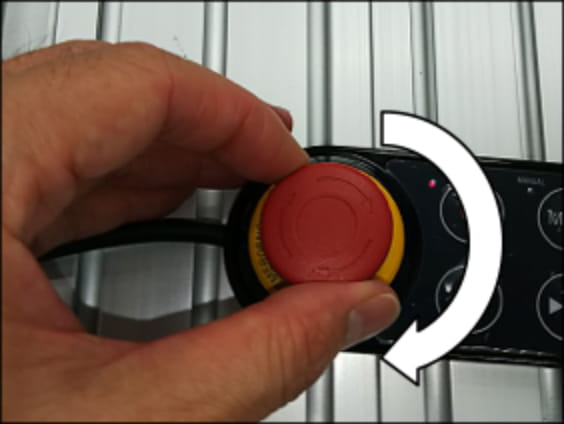
1.ロボットスティックの緊急スイッチを押下します。

2.コントローラボックスの電源をONします。

3.ロボットスティックの電源ボタンを押下します。

4.モニタでコントローラが起動したことを確認したら、緊急スイッチをOFFにします。OFFにするには、ボタンを矢印方向へ回転させます。
5.ロボットスティックの3つのランプが点滅し、ロボットの表示ライトリングが赤とライトブルーで交互に点滅します。
6.スタートアップの位置へロボットを移動させます。まず、両手でフランジ付近を持ちながら、FREEボタンを押しつづけます。(押してその状態を維持してください)

7.サーボモータのブレーキを開放するクリック音がしたら、スタートアップの位置へ各ジョイントを動かして移動させます。このときジョイントは重いので多少の力が必要です。
移動したら、まだ手は離さずに、FREEボタンをOFFします。OFFにしても両手でその状態を維持します。
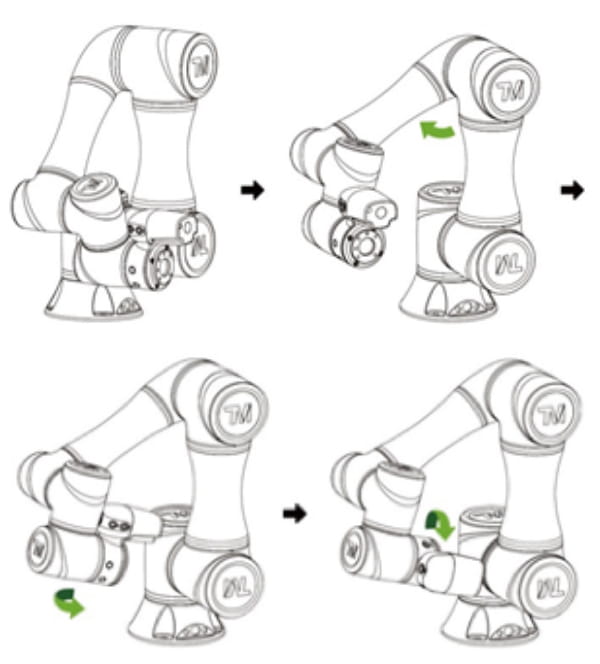
8.再びブレーキを有効にするクリック音がします。その後、手を離します。
9.ロボットスティックの停止ボタンを3秒押し続けます。
ロボットはキャリブレーションプロセスに入り、わずかに動きます。
完了すると、表示ライトリングは青色の変わります。
このとき、オートモードのランプが点灯しています。

3-4 マニュアル/オートモード
3-4-1 モードの種類
モードには、2つの操作モードと2つの動作モードがあります。
現在のモードは、ロボットスティック上のモードインジケータおよびロボットのエンドモジュールの表示ライトリングの色を通して、視覚的に判断できます。
- 操作モードは次の2つです。
- オートモード
- マニュアルモード
・オートモード
オートモードでは、ロボットスティック上の実行/一時停止ボタンを押下すると、プロジェクトを実行または一時停止します。ロボット速度は、プロジェクト速度により決定されます。
エンドモジュールのFREEボタンは、オートモードでは動作しません。
・マニュアルモード
マニュアルモードは2つの動作モードに分けれます。
- マニュアル制御モード:表示ライトリングがグリーンで点灯
- マニュアル試運転モード:表示ライトリングがグリーンで点滅
・マニュアル制御モード
マニュアルモードでは、ロボットが動作していない場合、マニュアル制御モードです。
エンドモジュール上の FREEボタンを押下して、ハンドガイドによりロボットをガイドしたり、「コントローラー」ページを使用してロボットをジョグさせたりします。
ロボットがマニュアル制御モードにあるとき、すべてのロボット動作は250 mm/秒以下に制限されます。ロボット速度が 250 mm/秒を超えるとエラーにより停止します。更に、ハンドガイドモードはマニュアル制御モードからのみ起動することができます。ハンドガイドによりロボットを移動するには、エンドモジュールの FREE ボタンを押下します。
・マニュアル試運転モード
HMI のプロジェクト編集ページに入っているとき、ロボットスティック上の実行/一時停止ボタンを押下すると、マニュアル試運転モードになります。
マニュアル試運転モードでプロジェクトを編集する場合、250 mm/秒の速度制限は適用されませんが、試運転ごとにプロジェクト実行速度は5%に低下します。ロボットスティックの+/-ボタンを使用して、マニュアル試運転モードでプロジェクト実行速度を調整できます。
ボタンを押下するたびにプロジェクト実行速度が5%ずつ増減します。これは、プロジェクト実行速度を調整するために使用されます。
3-4-2 モード切替え
- 1.オートモードからマニュアルモードへの変更
- ①ロボットスティックの停止ボタンを押下してロボットを停止させます。
- ②M/Aボタンを押下します。
- 2.マニュアルモードからオートモードへの変更
- ①ロボットを停止させた状態で「実行設定」画面もしくは「表示」画面にします。
- ②M/Aボタンを長押しして、“ピッ” と音がしたら離します。
- ③マニュアルのランプが点滅していることを確認します。
- ④+/-ボタンを次の順で押下します。
- + ⇒ ― ⇒ + ⇒ + ⇒ ―
・両方のモードで協調モードと非協調モードで動作させることができます。
・ロボットは起動時にオートモードになります。
3-5 表示ライトリング
3-5-1 表示ライトリング表について
表示ライトリングの色と点灯状態でロボットの状態を表します。


エラー状態からの復旧方法

- 第1章 はじめに
- 1-1 協調ロボット
- 1-2 TMシリーズ
- 1-3 安全について
- 第2章 協調ロボット TMシリーズ
- 2-1 基本構成
- 2-2 ハードウェア
- 2-3 ソフトウェア
- 2-4 周辺機器
- 2-5 座標系(ベース)
- 2-6 特異点
- 2-7 TCP
- 2-8 設置条件
- 第4章 基本動作のプログラミング
- 4-1 ログイン
- 4-2 初回起動時にすべきこと
- 4-3 ティーチング
- 4-4 緊急スイッチ(E-STOP)からの復帰
- 4-5 FreeBotコントロール
- 4-6 協調(協働)モードの設定
- 4-7 デカルト制限
- 第5章 フローチャートを使ったプログラミング
- 5-1 フローチャートとノード
- 5-2 ポイント設定
- 5-3 シンプルなPick&Place
- 第6章 グリッパーの取付け方法
- 6-1 エンドエフェクタの使用準備
- 6-2 グリッパー コンポーネント
- 6-3 グリッパーボタン
- 第7章 キャリブレーションとビジョンノード
- 7-1 カメラ
- 7-2 ビジョン キャリブレーション
- 7-3 ビジョンノードとタスクデザイナー
- 7-4 パターンマッチング(形状)
- 7-5 ブロブファインダ
- 7-6 Visionベース
- 第8章 カメラを使ったP&P動作の設定
- 8-1 Pick&Place
- 参考 ステップ実行
- 8-2 TM Landmarkを使ったP&P
- 8-3 TM Landmarkへ関連づけたP&P
- 参考 プログラムのスタイル