第2章
協調ロボット TMシリーズ2-1 基本構成
2-1-1 基本構成について
TMシリーズは次の3つから構成されています
・ロボットアーム
・コントロールボックス
・ロボットスティック



別途、モニタ(HDMI)とマウス(ホイール2ボタン)、キーボード(英語配列)を用意します。
ロボットから音声を出力させるには、スピーカ付モニタもしくは外付けスピーカが必要です。

2-1-2 技術仕様

外部IOモジュールとして、下記オムロンのIOユニットが接続できる機能を追加しました。
・EtherCATカプラユニット:NX-ECC201,NX-ECC202,NX-ECC203
・デジタル入力ユニット:ID4442(8点、PNP),ID5342(16点、NPN)
・デジタル出力ユニット:OD4121(8点、NPN),OD5121(16点、NPN)
入出力ともに各128点までIOを追加可能です。
2-2 ハードウェア
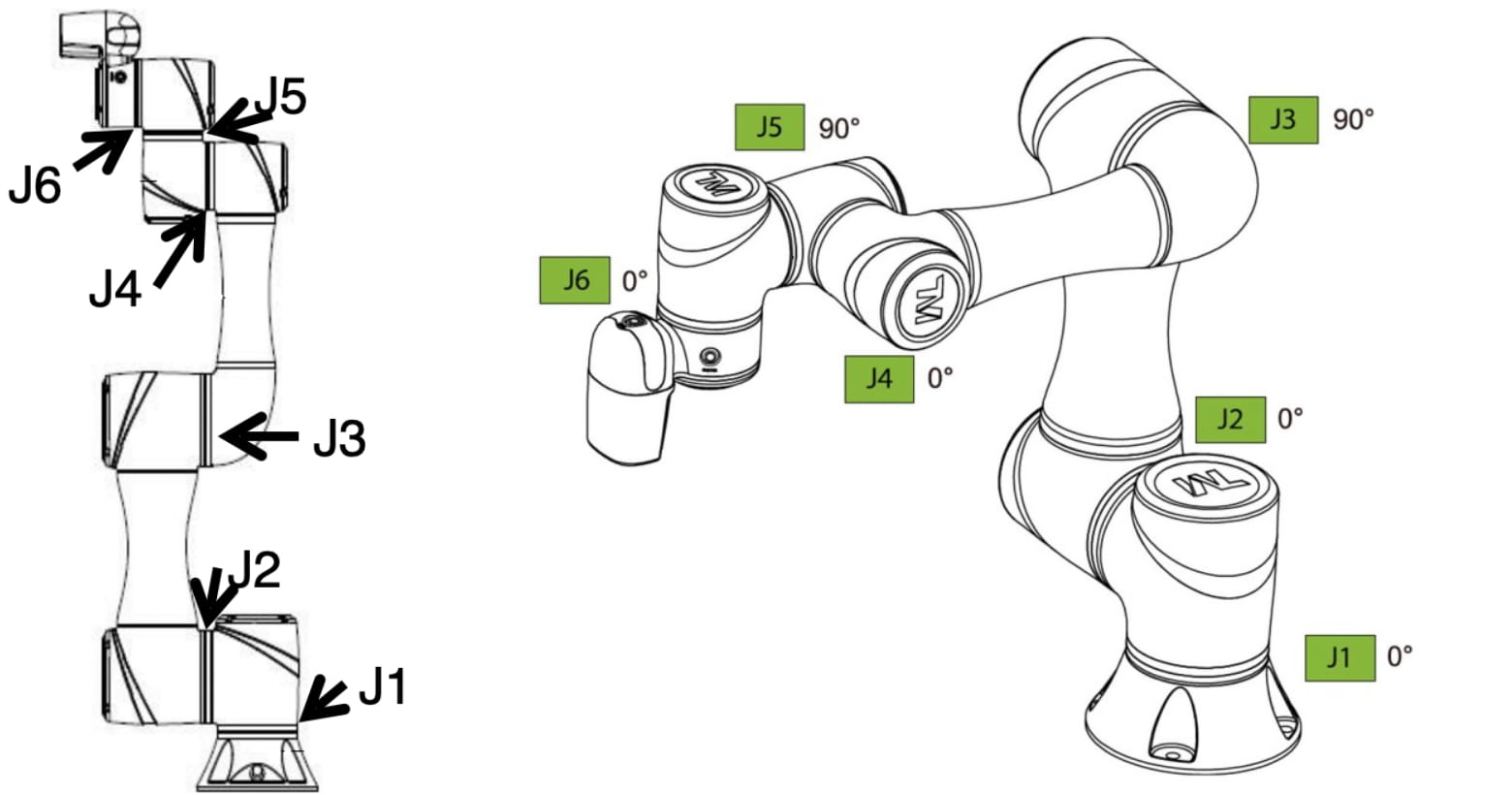
2-2-1 ロボットアーム
6軸ロボットアーム
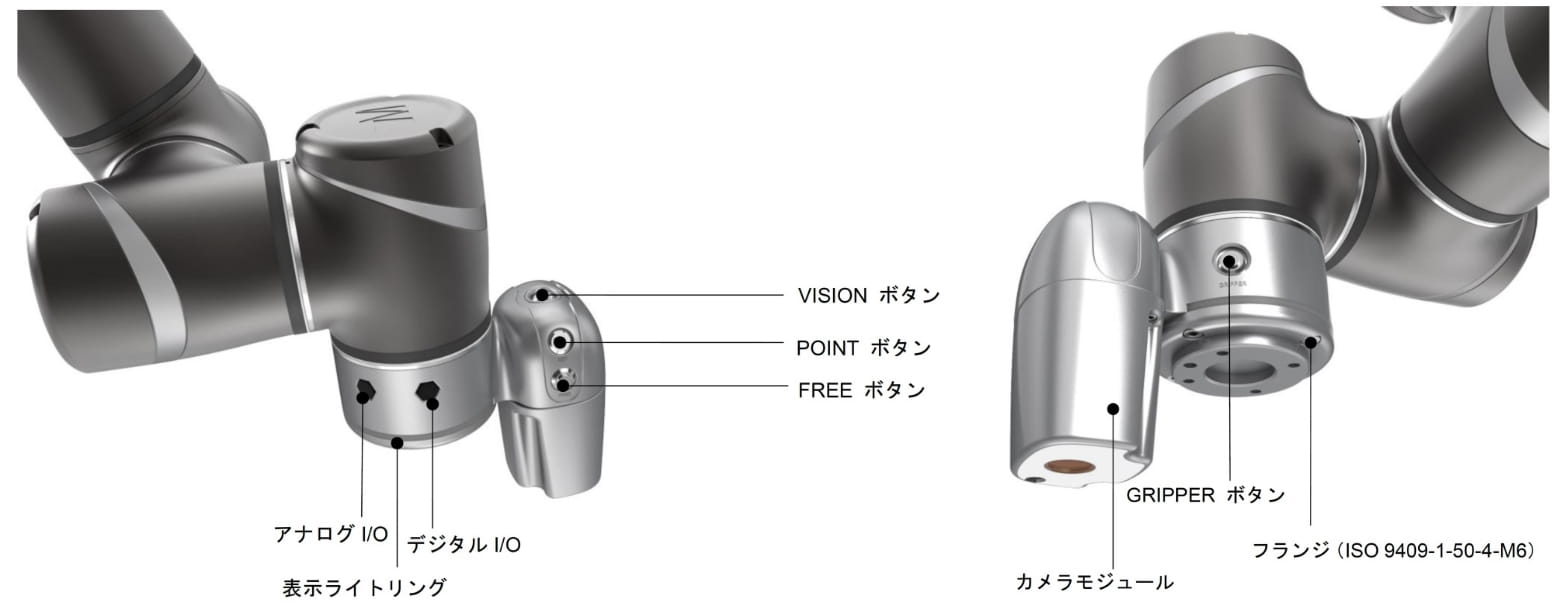
- カメラモジュール
- 5M CMOSカラーカメラ、AUTOフォーカス、フォーカス:100㎜~∞、白色LED照明、拡散板付
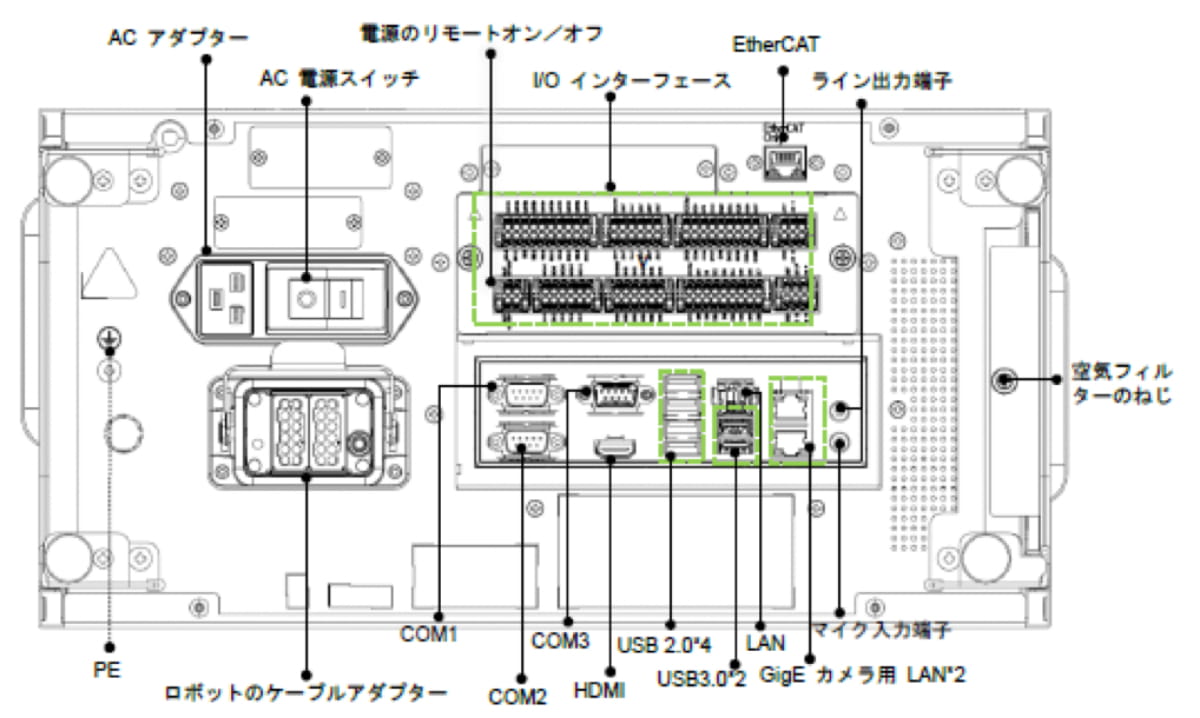
2-2-2 コントロールボックス
ハードウェアには複数のバージョンがあります。(H/W3.0、H/W3.1、H/W3.2)
本研修ではH/W3.0を使用します。
TM5M-700/ TM5M-900シリーズ、 TM5M-700 SEMI/ TM5M-900 SEMIシリーズについては、「TM5シリーズハードウェア設置マニュアル(SBCE-441)」を参照ください。
- ・GigEカメラ用LANはPoE対応ではありません。ご使用になるときは、別途インジェクタ―をご用意いただくか、直接カメラへ給電してください。
- ・EtherCATはマスター機能です。スレーブ機器として接続はできません。
- ・シリアルNoがコントロールボックスとロボットアームの両方の銘板にアルファベットと数字で記載されています。
- ・H/W3.2では安全機能の強化やI/O端子台が脱着可能になるなどの変更があります。
2-2-3 ロボットスティック
- ・各機能について
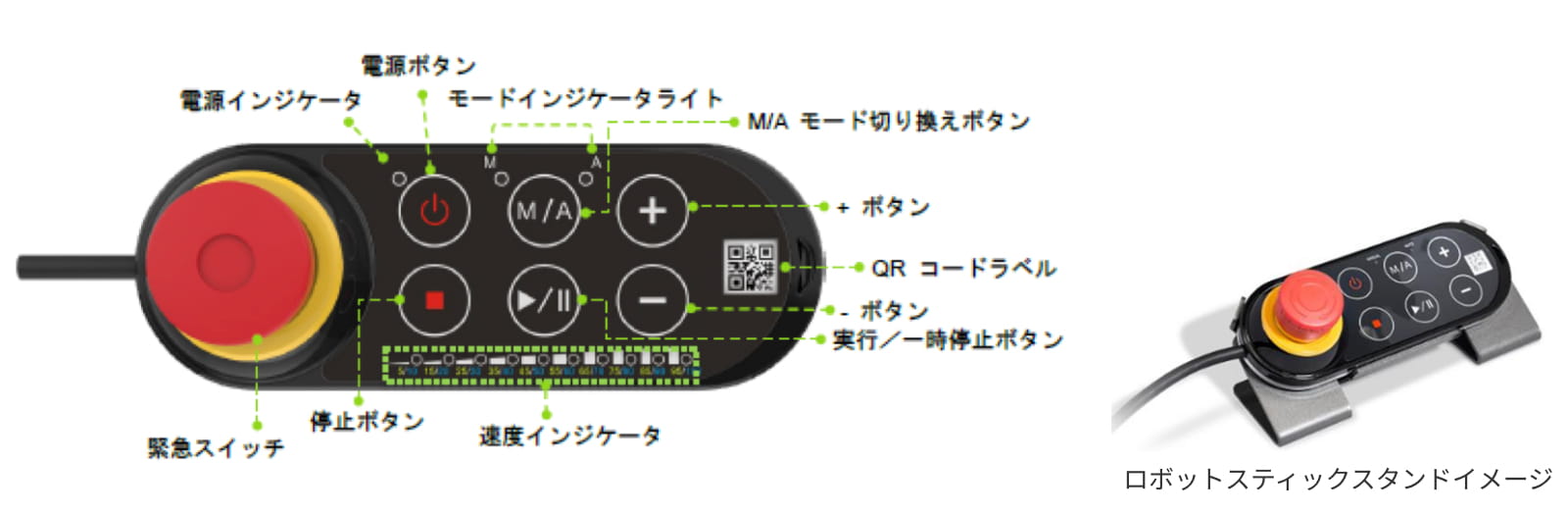
- ・ロボットスティックはロボットコントローラと一体(コネクタなし)です。
- ・QRコードはTCP/IP接続時のネットワーク内でのロボットの名前(SSID)を表します。
- ・裏面は磁石になっています。鉄板などへ張り付けておくことができます。
- ・磁石の貼り付きが十分でない場合は、ロボットスティックスタンドを使用します。
2-3 ソフトウェア
2-3-1 ソフトウェアについて
ロボットの電源をONするとTMflowが起動します。TMflowは、ロボットのパラメータの管理・設定やフローチャートでのロボットの動きおよび処理ロジックの設計をするためのグラフィカルHMIです。
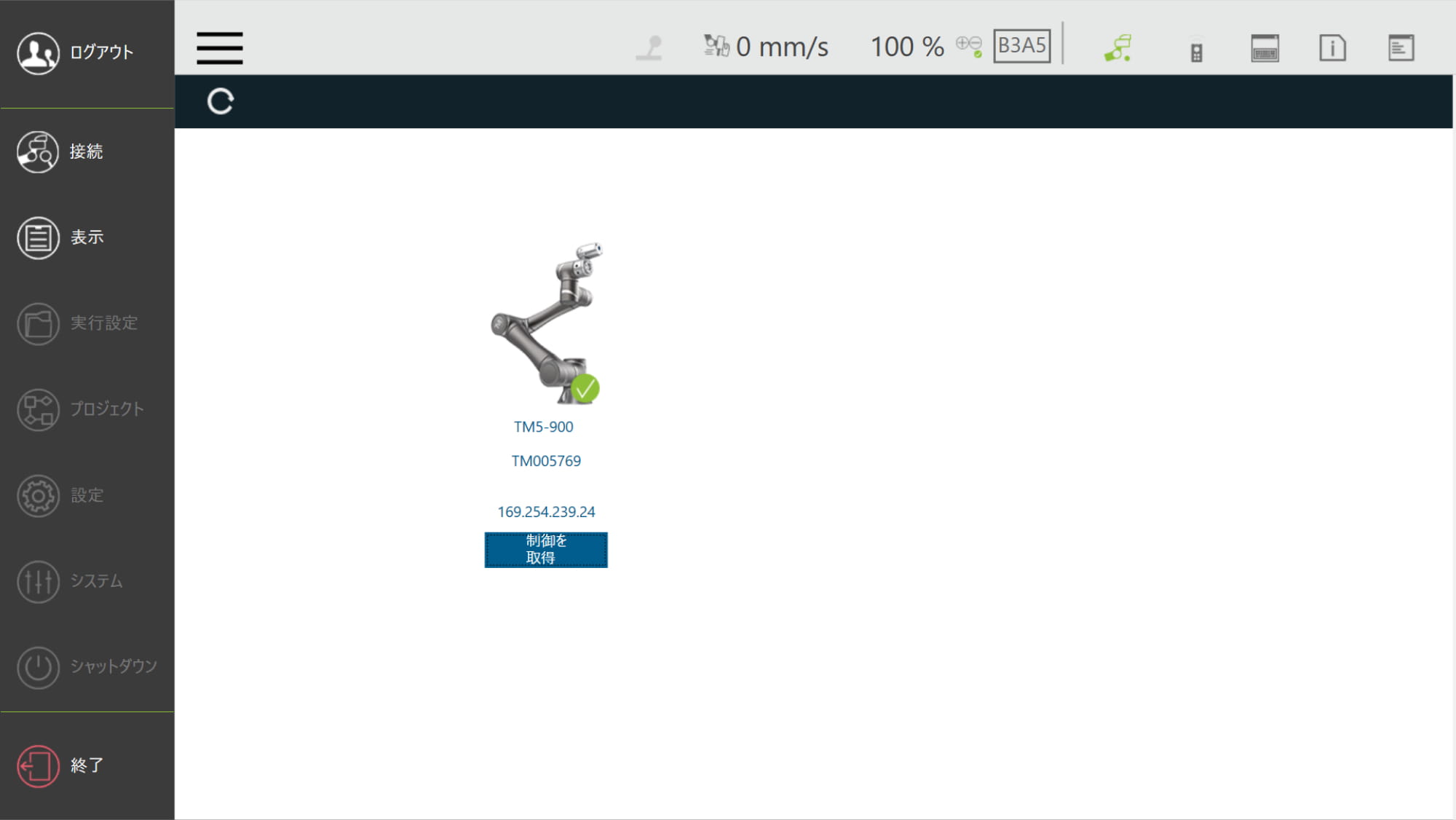
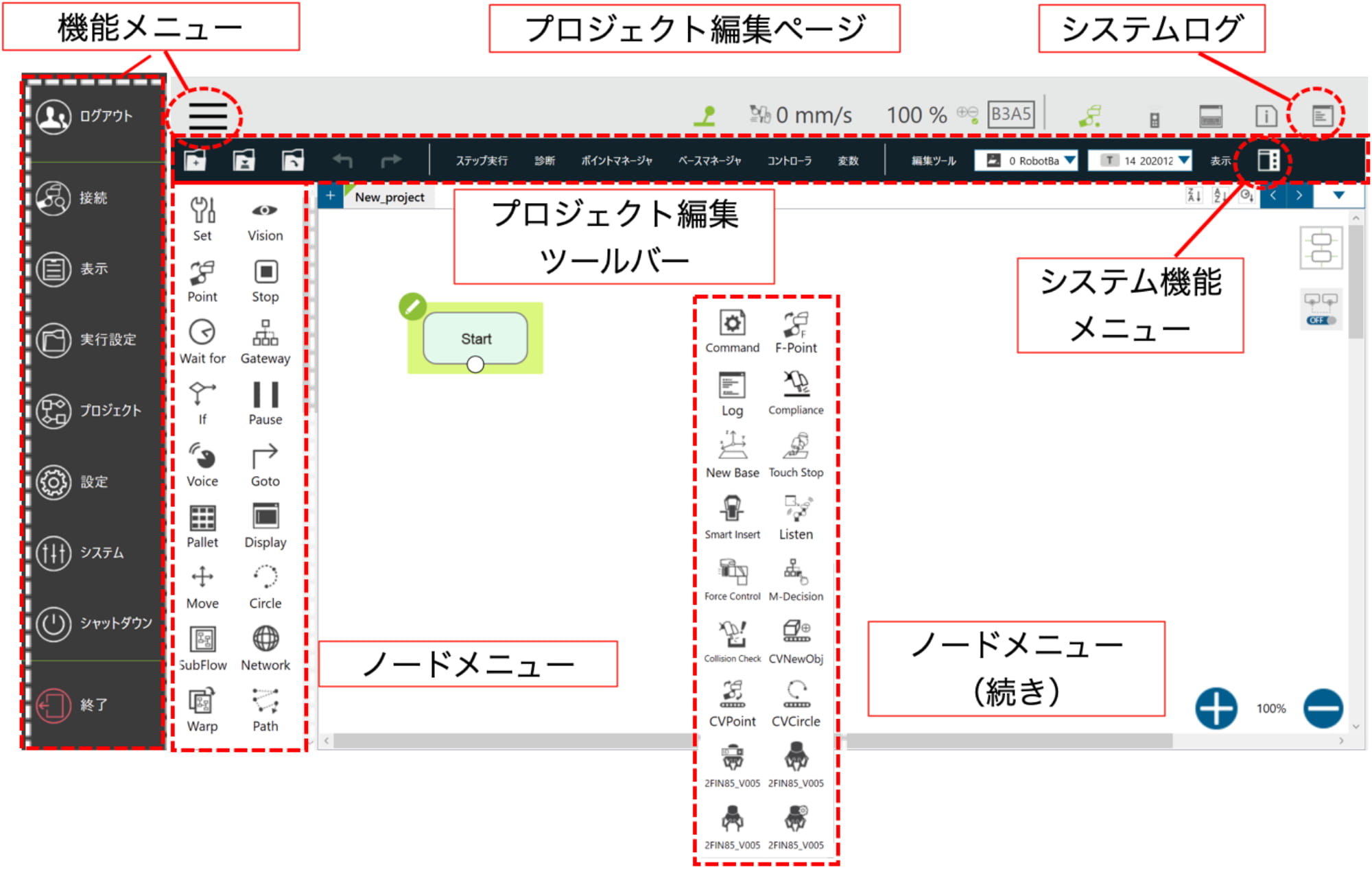
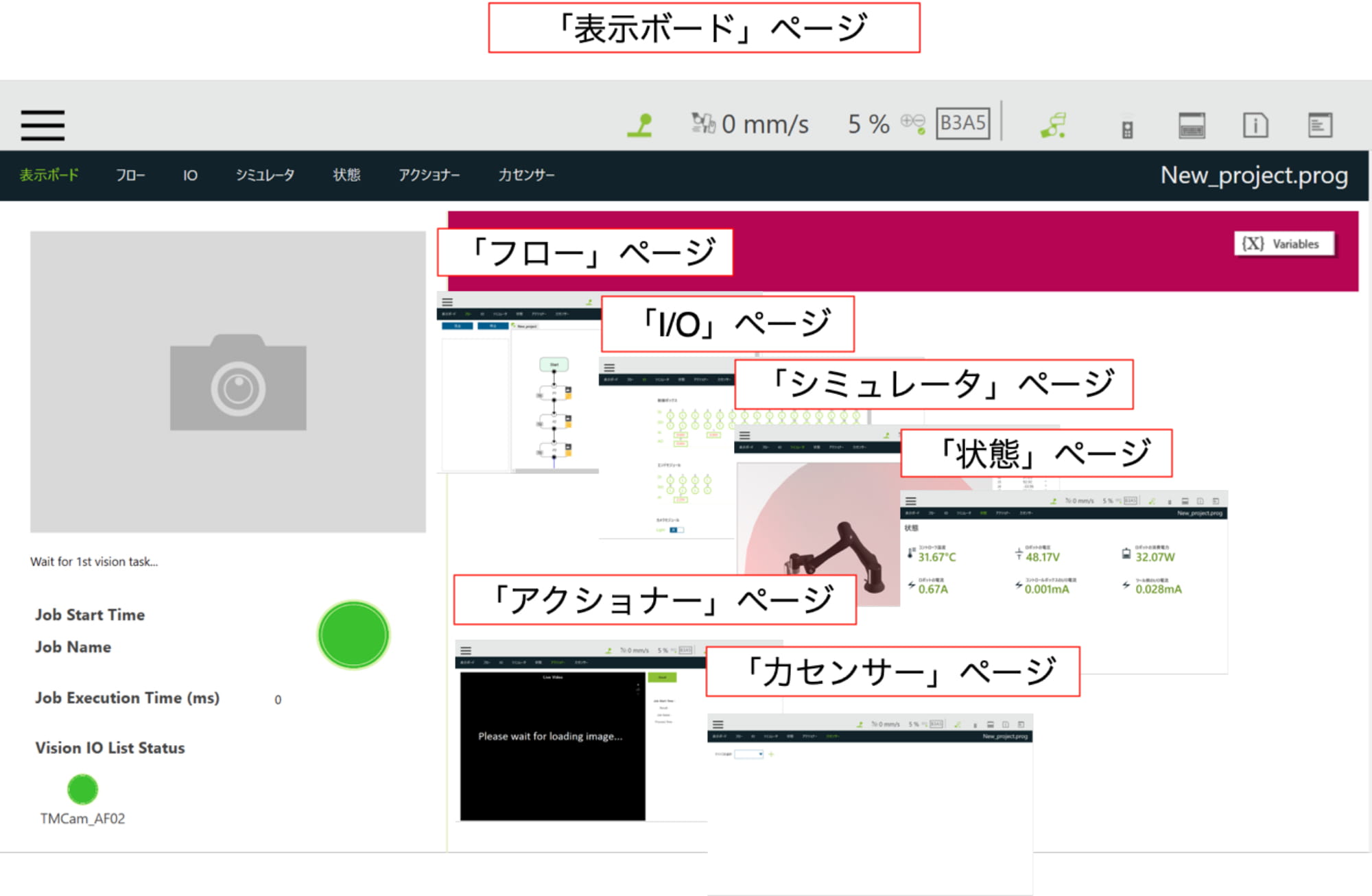
2-3-2 TMflow画面


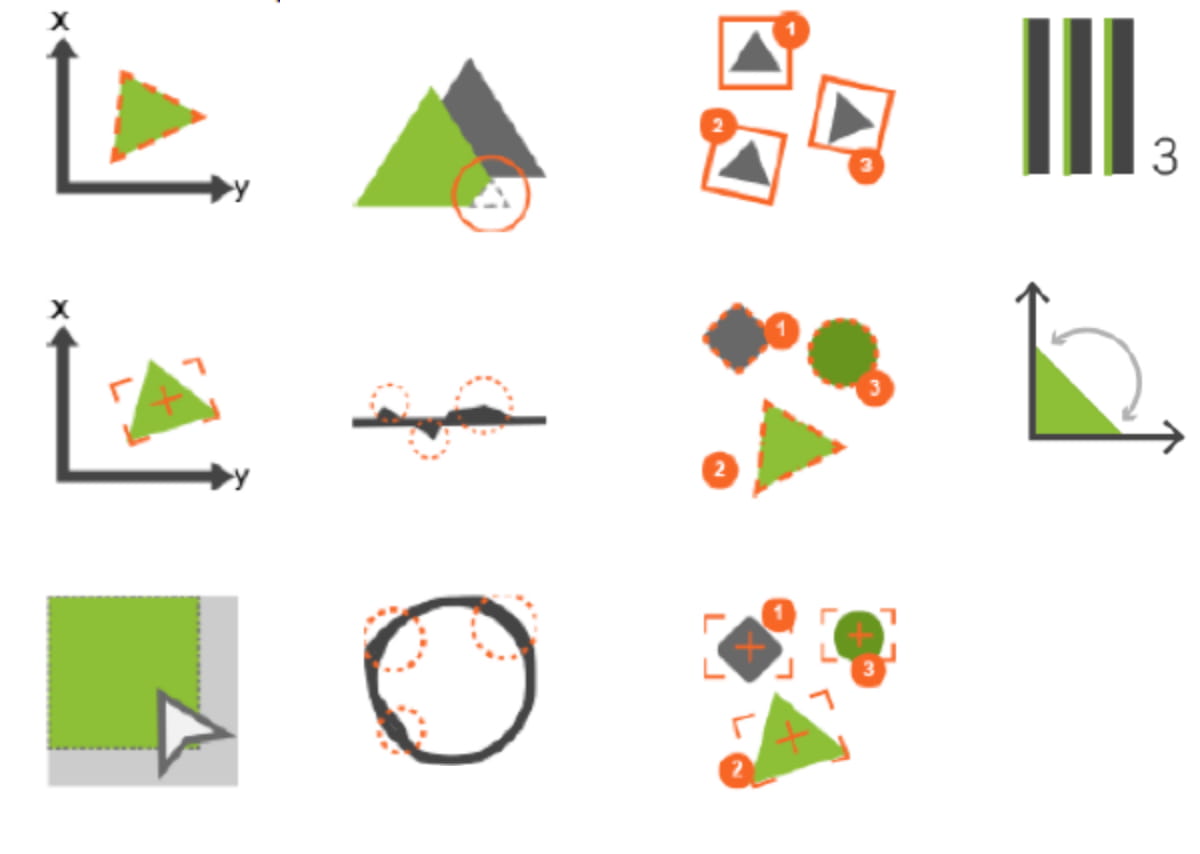
2-3-3 カメラ機能
・標準機能
- 画像処理
- - コントラスト
- - 着色
- - スムージング
- - 閾値処理
- - 構造化

- 検出機能
- - パターンマッチング(形状・画像)
- - 基準マークマッチング
- - ブロブファインダ(しみ検出)
- - アンカー
- - 外部検出

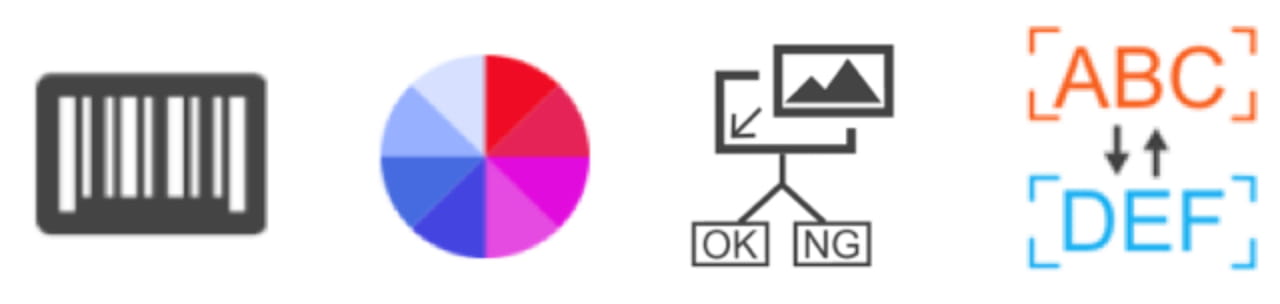
- 認識
- - バーコード/QRコード
- - カラークラシファイア(色分類)
- - 外部分類
- - String Match
・オプション(ライセンス)
- 認識&計測機能
- - Pose ariation (Shape)
- - Pose ariation (image)
- - 色エリアサイズ
- - 画像照合による欠落
- - バリ検出(直線形状)
- - バリ検出(円形状)
- - OCR(文字、数字)
- - 計数(しみ、形状、イメージ、エッジ)
- - 計測(距離、角度)
2-3-4 ライセンス
一部ソフトウェアとVisionの機能には、ライセンスが別途必要です。

※カメラを使用しないコンベヤトラッキングには、ライセンスは不要です。
外部カメラを使用したコンベヤトラッキングには、ライセンスが必要です。コンベヤトラッキングライセンスは外部カメラライセンスとセットになっています。既に外部カメラライセンスを購入されているお客さまには、無償でライセンスを追加します。
今後新規購入する外部カメラライセンスには、最初から外部カメラコンベヤトラッキングライセンスが入ります。
2-4 周辺機器
2-4-1 アクセサリ

2-4-2 TM5 同梱物
- ・TM Landmark 2枚
- ・ダイスボード
- 大:1枚
- 小:1枚
- ・IOケーブル
- 8Pin DigitalI/O
- 5Pin analogI/O
- ・電源ケーブル
- ・グランド線

2-4-3 プラグ&プレイ Ecosystem
プラグ&プレイ対応
Software
- ・通信プロトコル対応のプログラム開発必要なし
- ・ソフト機能がエラー処理対応

Hardware
- ・グリッパーボタン ― グリップ/リリースがワンプッシュで対応
- ・フランジ取付けOK
- ・フランジ横に配線用I/Oコネクタ有

・グリッパー


・電動ドライバ


・力覚センサ

EtherCAT接続

シリアル接続
2-5 座標系(ベース)
2-5-1 ベース
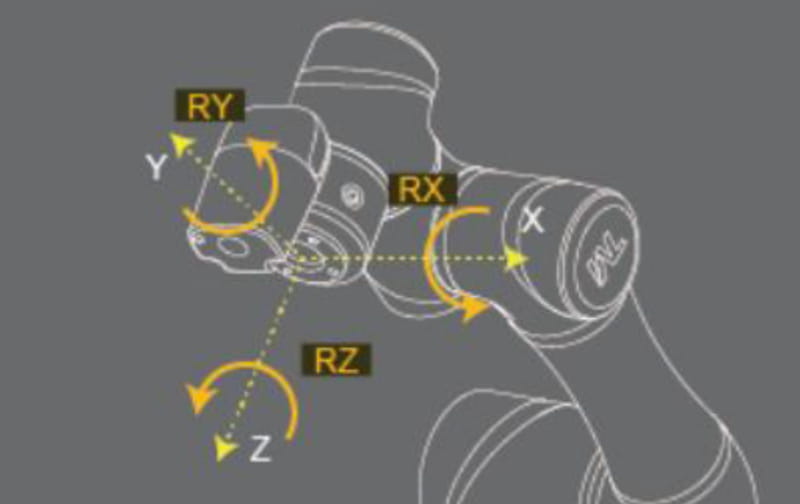
ロボットが指し示す「ポイント」は、ある「ベース」が持つX-Y-Z軸からなる3次元空間へ投影された位置と、Rx、Ry、Rzで表現される姿勢で定義されます。
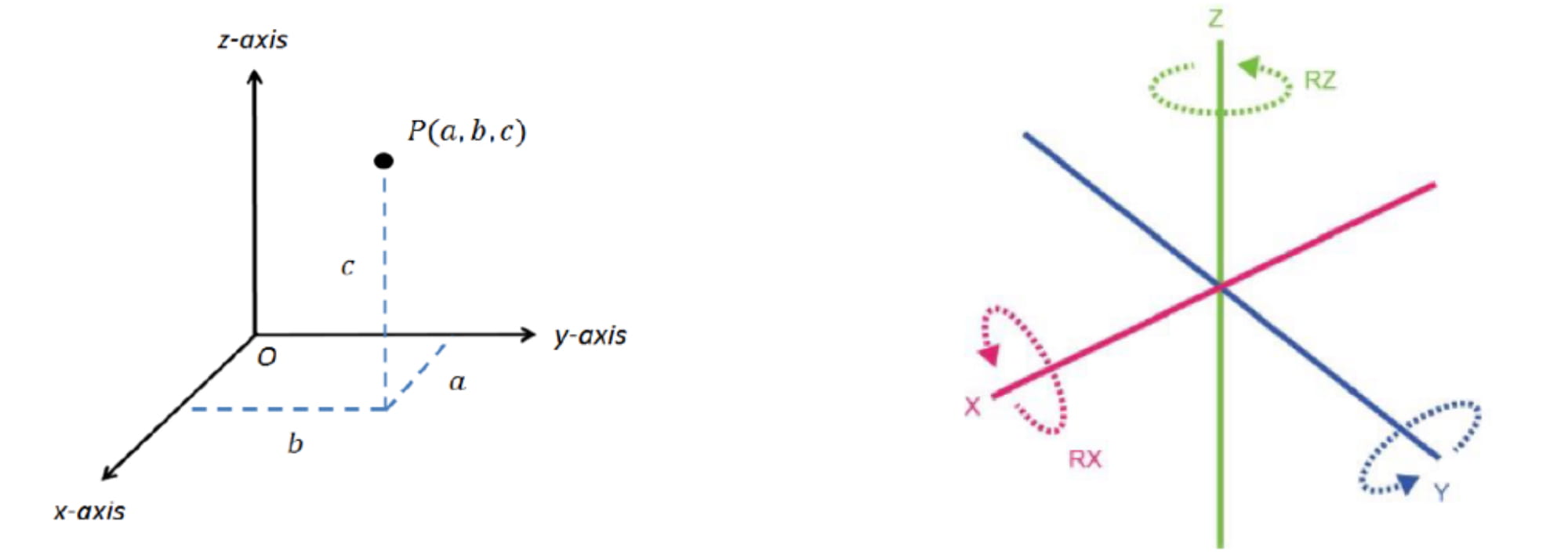
「ベース」は3次元空間におけるロボットの位置と姿勢へ対応して定義されるものです。
TMロボットでは、「ベース」を4カテゴリに分けて扱います。
- 1.ロボットベース
- 2.ツールベース
- 3.Visionベース
- 4.カスタムベース
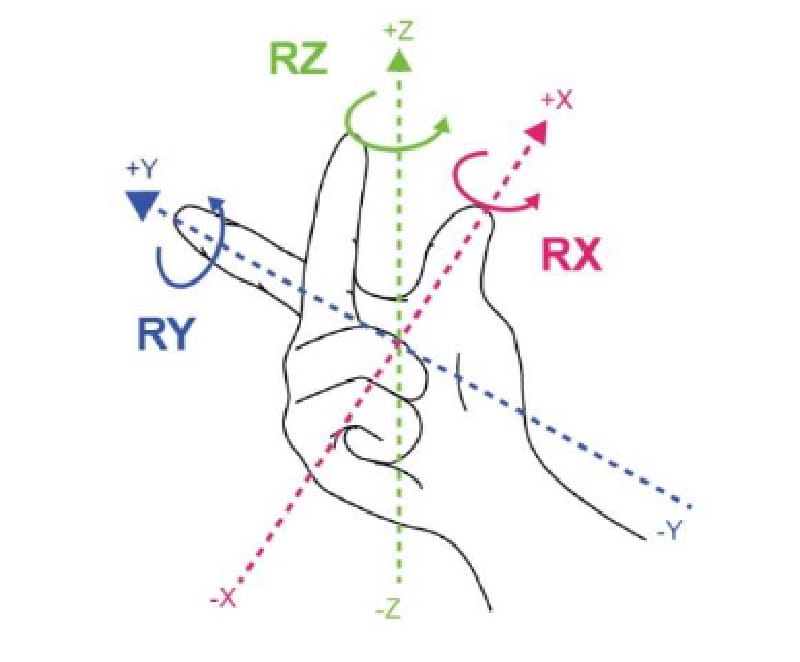
・右手系
ロボットで3次元の方向を決定するルール
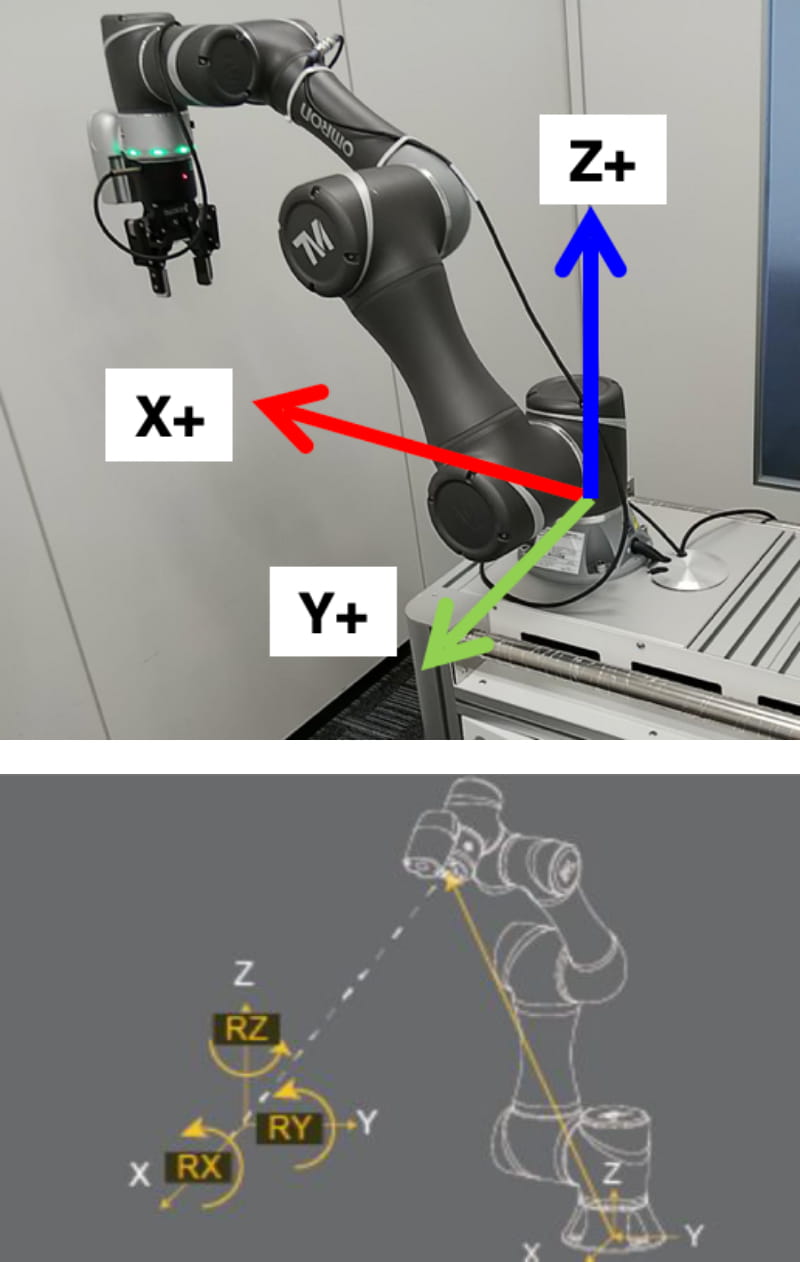
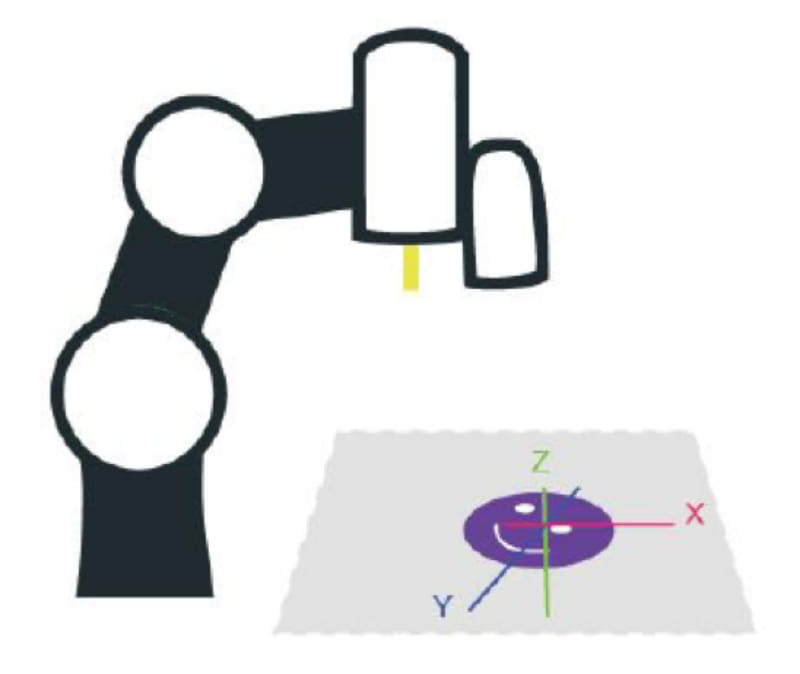
・ロボットベース(ワールド座標系)
ベース中心を原点とします。
・ツールベース
TCP(後述)の位置と姿勢を定義するのに使用されます。
TCPが設定されていなければ、フランジの中心点がツールベースの原点として扱われます。
あるプログラムで、ツールが摩耗したり、ツールチェンジした場合、ユーザーはプログラムを修正する必要はなく、このツールベースを再定義しさえすればよいです。
・ビジョンベース
ビジョンベースは、さらに「サーボイングビジョンベース」と「Fixポイントビジョンベース」に分けられます。本テキストでは、ビジョンベースのことを「Fixポイントビジョンベース」と限らせて説明します。
ビジョンベースでは、カメラ座標系とロボット座標系の関係性は、絶対座標系にある撮像した対象物の位置を計算することで知ることができ、撮像した対象物上にビジョンベースを作ります。
別章であらためて詳細説明します。
2-6 特異点
2-6-1 特異点について
ロボットには、ある姿勢、ある空間内において動作できないポイントもしくは空間が存在します。それを特異点もしくは特異空間とよびます。
この空間に腕がはいると、直ちに停止し、ワーニングを発行します。
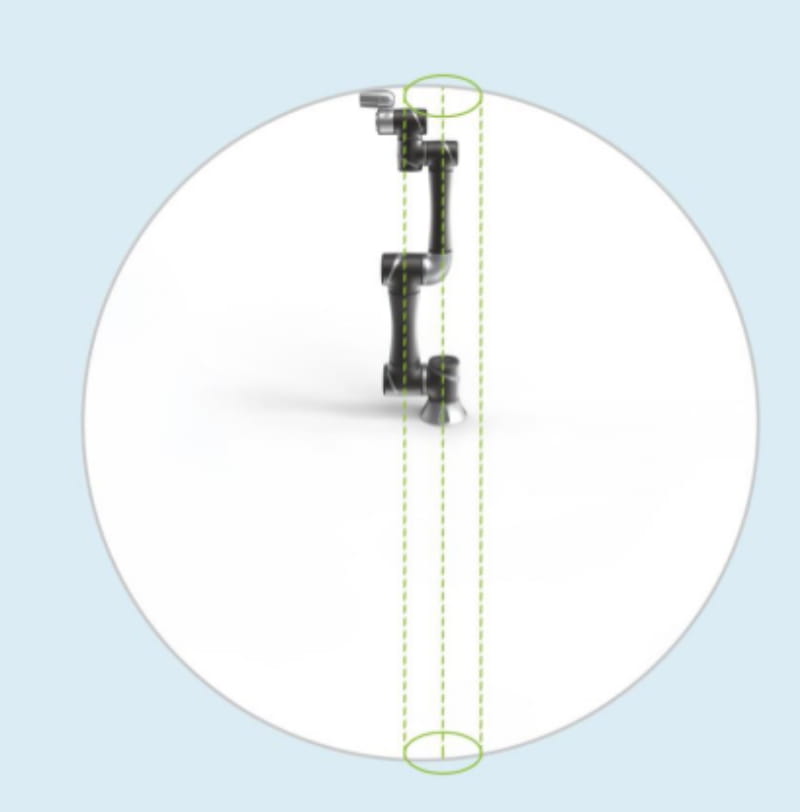
・インターナル特異空間
J1軸を中心とする円柱範囲内に腕が入ると、直ちに停止し、ワーニングを発行します。
この状態になったら、FREEボタンを押して、その状態から解放し、ポイント位置を再考するか、モーションタイプをPTP(後述)へ変更します。

・エクステンシブル特異空間
J3軸がほぼ伸びきっている状態。
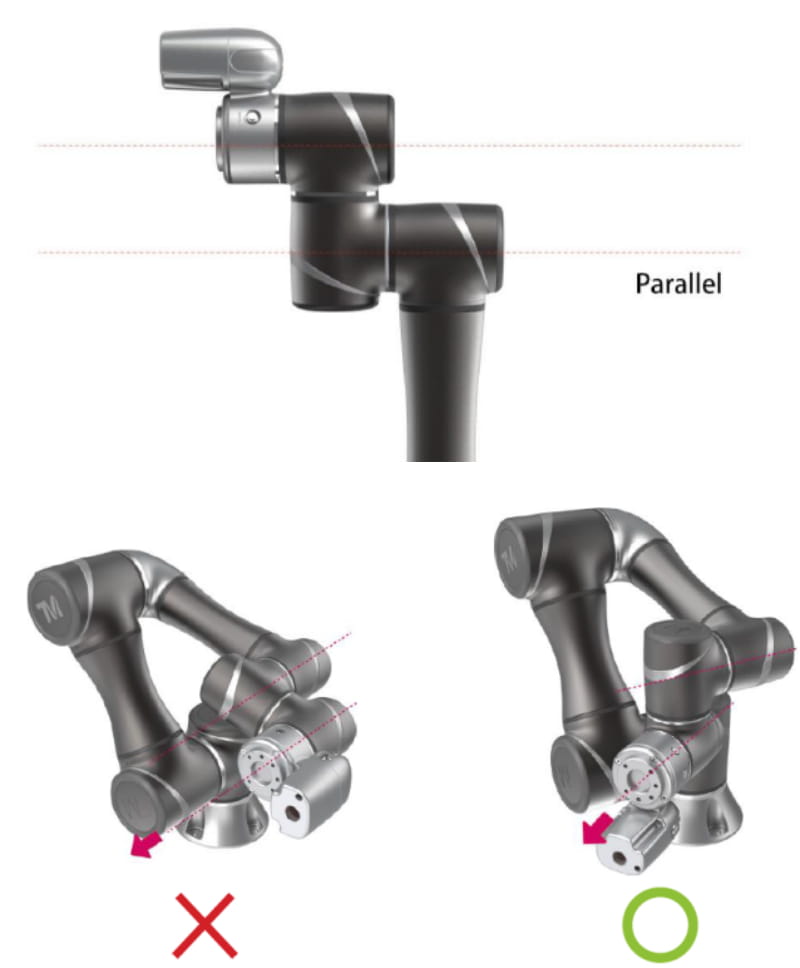
・リスト特異空間
4軸と6軸が平行な状態。
ツールベースZ軸に沿って動かす必要のあるとき。平行にならないようにずらしてあげる。
2-7 TCP
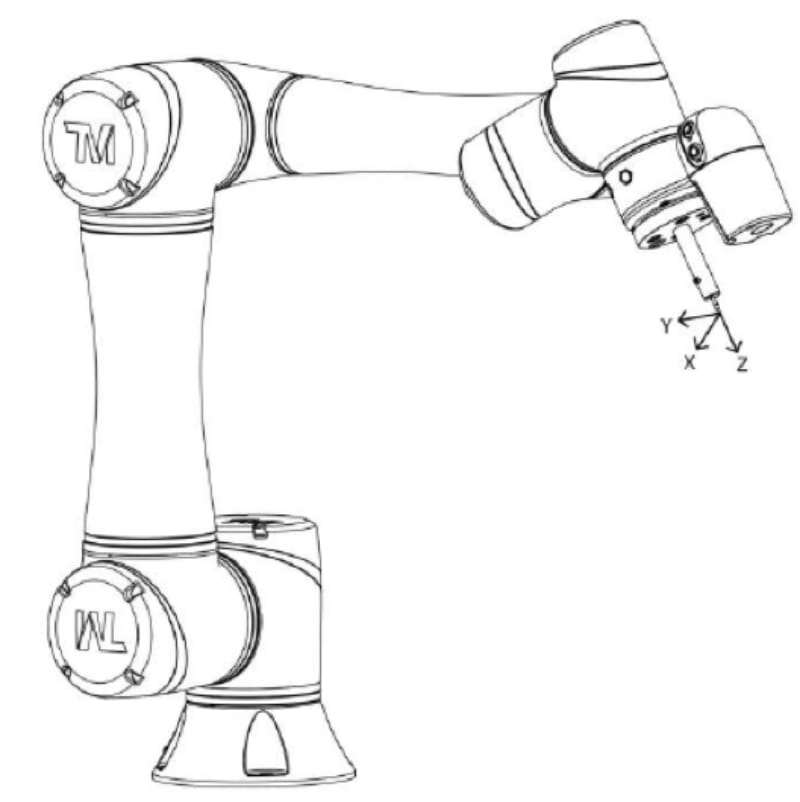
2-7-1 TCP(Tool Center Point)について
TCPは、通常、ロボットのツール先端にあり、フランジの中心軸に沿った上にある。またツール重量やイナーシャ値も設定することで、正確な協調ロボットの動作をおこなうことができます。
2-7-2 最大有効荷重
ロボットの最大許容負荷は、負荷の重心位置とツールフランジの中心からの距離によって変わります。
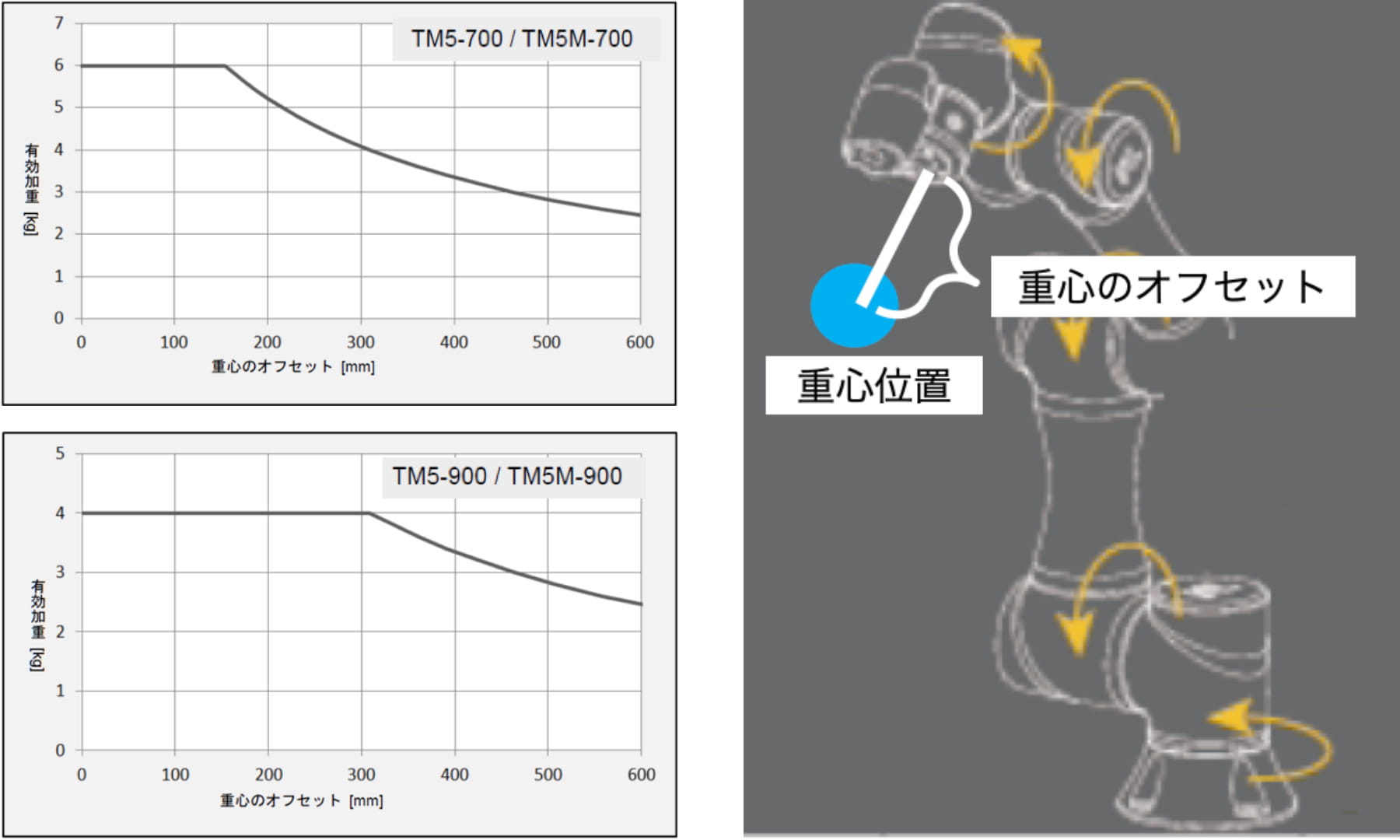
エンドエフェクターとワークの総重量が最大有効荷重のグラフの範囲を超えないようにする必要があります。
システム全体の安全を保障するために、エンドエフェクタ―と有効荷重のサンプルを含む、完全なリスクアセスメントを実施しなければなりません
2-8 設置条件
2-8-1 設置条件について
- ・平らな面に取り付けます。
ねじを事前に準備しておきます。 ※モバイルワークステーションには同梱されています。 - M10 x L30を4本
- 強度8.8以上を推奨
・壁掛け、天吊りの設置にも対応
- 第1章 はじめに
- 1-1 協調ロボット
- 1-2 TMシリーズ
- 1-3 安全について
- 第2章 協調ロボット TMシリーズ
- 2-1 基本構成
- 2-2 ハードウェア
- 2-3 ソフトウェア
- 2-4 周辺機器
- 2-5 座標系(ベース)
- 2-6 特異点
- 2-7 TCP
- 2-8 設置条件
- 第4章 基本動作のプログラミング
- 4-1 ログイン
- 4-2 初回起動時にすべきこと
- 4-3 ティーチング
- 4-4 緊急スイッチ(E-STOP)からの復帰
- 4-5 FreeBotコントロール
- 4-6 協調(協働)モードの設定
- 4-7 デカルト制限
- 第5章 フローチャートを使ったプログラミング
- 5-1 フローチャートとノード
- 5-2 ポイント設定
- 5-3 シンプルなPick&Place
- 第6章 グリッパーの取付け方法
- 6-1 エンドエフェクタの使用準備
- 6-2 グリッパー コンポーネント
- 6-3 グリッパーボタン
- 第7章 キャリブレーションとビジョンノード
- 7-1 カメラ
- 7-2 ビジョン キャリブレーション
- 7-3 ビジョンノードとタスクデザイナー
- 7-4 パターンマッチング(形状)
- 7-5 ブロブファインダ
- 7-6 Visionベース
- 第8章 カメラを使ったP&P動作の設定
- 8-1 Pick&Place
- 参考 ステップ実行
- 8-2 TM Landmarkを使ったP&P
- 8-3 TM Landmarkへ関連づけたP&P
- 参考 プログラムのスタイル