第1章
はじめに1-1 協働ロボット
1-1-1 協働ロボットとは
「協働ロボット」とは、日本工業規格(JIS)で次のように定義されています。
規定された協働作業空間で、人間と直接的な相互作用をするように設計されたロボット。
引用:JIS B 8433-2 : 2015 (ISO 10218-2: 20111)
「協働作業空間」についても次のように定義されています。
ロボット作業セルの安全防護空間内の、生産作業中にロボットと人間とが同時に作業を遂行できる作業空間。
引用:JIS B 8433-2 : 2015 (ISO 10218-2: 20111)
近年、世界各国のモノづくり現場では、人手不足が深刻化する一方、市場の多様化するニーズに応じて多品種少量生産や製品ライフルサイクルの短命化が進み、生産品目の変更や需要変動に合わせた生産ラインの柔軟なレイアウト変更や立ち上げが求められています。
このような「フレキシブルなモノづくり」を実現するために重要な役割を担うのが、人と同じ空間で安全に作業を行える協働ロボットです。
オムロンは、人と機械の未来のために、人と機械が協調するモノづくり現場を目指していきます。これを実現するのが「協調ロボット TMシリーズ」です。

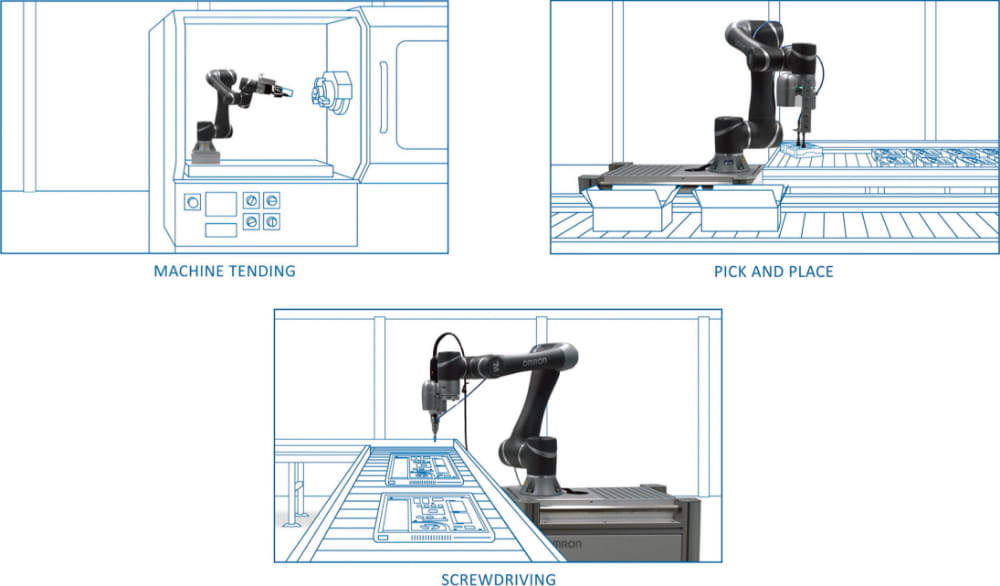
1-1-2 協調ロボットのアプリケーション
自動車やデジタルの部品の組立てや製品試験、検査、または、食品二次工程や化粧品の包装やパレタイジングなど、様々な業界の様々なアプリケーションにおいて、これまで産業用ロボットでは困難であった人依存の工程へ、協調ロボットなら簡単に、またフレキシブルに導入できます。
- ・製造作業者が行っている検査作業をそのまま自動化
- - モニタに表示される検査結果による、良品、不良品仕分け
- - 作業者が不在時にロボットを簡易に移設、設定し作業代行
- ・カメラ内蔵により、人が行う複数工程による組立作業を自動化
- - ダイレクトティーチングにより取出、加工、組立位置を簡単設定
- - カメラにより部品位置を検出し、複数部品を組立
1-1-3 アプリケーション例
1-1-4 テックマン・ロボット社(Techman Robot Inc.)
テックマン・ロボットは協調ロボットとビジョン・テクノロジーのグローバル・リーダーです。
親会社のクアンタ・コンピュータ社(Quanta Computer Inc.)の支援を受け、ビジョンシステムを一体化した世界で最もインテリジェントな協調ロボットを開発、提供するようになりました。
「手」と「目」、「頭脳」が一つのシステムに統合されたテックマンのロボットは、産業用ロボットの使い勝手を大きく改善し、導入費用・時間を著しく削減することが可能です。
テックマンのゴールは、TECHnology (技術)を活かしてhuMAN(人)の生活を豊かにすることであり、私たちは技術革新にまい進し、世界に対して最も使いやすいオートメーション・ソリューションを提供することで社会に貢献してまいります。
引用:オムロン ニュースリリース
オムロン株式会社と台湾・協調ロボットメーカー テックマン・ロボット社 協調ロボット分野で戦略的提携を締結
“人と機械が協調するモノづくり現場”の更なる実現に貢献”
https://www.omron.com/jp/ja/news/2018/05/c0514.html
1-2 TMシリーズ
1-2-1 ラインナップ
アーム長には4タイプあります。

| 最大可搬重量 | アーム長 | |
|---|---|---|
| TM5-700 | 6kg | 700mm |
| TM5-900 | 4kg | 900mm |
| TM12 | 12kg | 1300mm |
| TM14 | 14kg | 1100mm |
それぞれにAC電源仕様、DC電源仕様品があります。
1-2-2 特徴
- Smart(知的):
- カメラ搭載:人の目で見て行う製造作業が自動化
一体型のインテリジェントなビジョンシステムを搭載しており、新たにビジョンシステムを追加することなくパターン認識やモノの位置・配置の検出、バーコード認識などが可能です。
- Simple(簡単):
- 作業フロー+ダイレクトティーチングの簡単設定
フローベースのグラフィカルなユーザインタフェースで、ビジョンを活用したPick&Placeのアプリケーションが簡単に作成可能です。
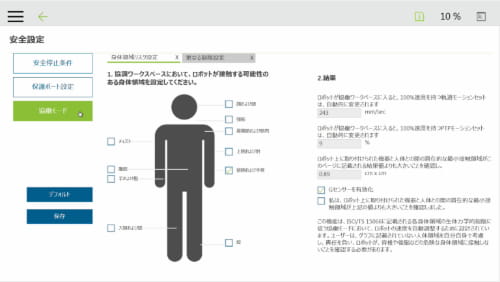
- Safe(安全):
- 安全パラメータを簡単設定
産業用ロボットの安全基準であるISO 10218-1と、協調ロボットの技術仕様書であるISO/TS 15066に適合しており、人とロボットが共通の作業空間で協調して作業することが可能です。ISO TS15066に基づく安全パラメータを簡単に設定するユーザインターフェースを実装しています。
1-2-3 仕様
TM5



1-3 安全について
1-3-1 安全規格
TMシリーズは、機械指令(MD)(EC指令No.2006/42/EC )の第3者認証機関による認証を取得し、関連する規格に適合しています。本テキストでは、TMシリーズの操作習得を目的としているため、それら規格の詳細や規格の理解、それに関わるQ&Aについては対象範囲としておりません。
安全に関する情報は、「安全マニュアル(SBCE-443)」および「TM5シリーズハードウェア設置マニュアル(SBCE-441)」、 「TM12&14シリーズハードウェア設置マニュアル(SBCE-442) 」を必ずお読みいただき、ご理解し、実行してください。
安全に対するご相談は、オムロンお客様相談室へお問い合わせいただくか、オムロン販売員もしくはTMシリーズ取扱い販売店へお願いいたします。
■責任の制限■
安全マニュアルを順守した場合でも、本テキストに含まれる安全関連の情報が、TM シリーズのロボットが怪我または損害を引き起こさないことを保証するものではありません。
1-3-2 リスクアセスメントと安全衛生特別教育
協調ロボットTMシリーズをご使用するときは、必ず事前にリスクアセスメントを実施してください。また、実際にロボットを使って教示作業等を行う方は、安全衛生特別教育(教示)を受けてください。
労働安全衛生規則第36条第31号および32号において、産業用ロボットの教示等を行う作業や検査・修理・調整等を行う作業は、労働安全衛生法で定める「危険又は有害な業務」に該当します。労働安全衛生法第59条により、事業者は労働者に対し「安全又は衛生のための特別の教育」を行う義務があります。
お客様やSier様の責任において、リスクアセスメントの結果から適切な安全対策を実施してください。
1-3-3 安全セミナ
オムロンでは安全に関する「FA実践セミナ」を定期的に開催しています。
また、「eラーニング」(無料)もご利用いただけます。安全に対する理解を深めるのにご活用ください。

・協調ロボット安全トレーニング
- 協調ロボットに関する安全知識習得のトレーニングをご用意しています。
- - 開催場所:東京、名古屋、大阪
- - Webではご案内していませんのでお問い合わせください。

- カリキュラム
- ロボットの安全に関する法令
- 産業用ロボットの安全規格要求
- 協働ロボットの安全規格要求
- 協働ロボットシステムのリスクアセスメント
- リスクアセスメント演習
- 協調ロボットTMシリーズの安全機能
・安全コンサルティングサービス
リスクアセスメントなどお困りごとがあれば、安全コンサルティングサービスもご利用いただけます。
- 第1章 はじめに
- 1-1 協調ロボット
- 1-2 TMシリーズ
- 1-3 安全について
- 第2章 協調ロボット TMシリーズ
- 2-1 基本構成
- 2-2 ハードウェア
- 2-3 ソフトウェア
- 2-4 周辺機器
- 2-5 座標系(ベース)
- 2-6 特異点
- 2-7 TCP
- 2-8 設置条件
- 第4章 基本動作のプログラミング
- 4-1 ログイン
- 4-2 初回起動時にすべきこと
- 4-3 ティーチング
- 4-4 緊急スイッチ(E-STOP)からの復帰
- 4-5 FreeBotコントロール
- 4-6 協調(協働)モードの設定
- 4-7 デカルト制限
- 第5章 フローチャートを使ったプログラミング
- 5-1 フローチャートとノード
- 5-2 ポイント設定
- 5-3 シンプルなPick&Place
- 第6章 グリッパーの取付け方法
- 6-1 エンドエフェクタの使用準備
- 6-2 グリッパー コンポーネント
- 6-3 グリッパーボタン
- 第7章 キャリブレーションとビジョンノード
- 7-1 カメラ
- 7-2 ビジョン キャリブレーション
- 7-3 ビジョンノードとタスクデザイナー
- 7-4 パターンマッチング(形状)
- 7-5 ブロブファインダ
- 7-6 Visionベース
- 第8章 カメラを使ったP&P動作の設定
- 8-1 Pick&Place
- 参考 ステップ実行
- 8-2 TM Landmarkを使ったP&P
- 8-3 TM Landmarkへ関連づけたP&P
- 参考 プログラムのスタイル