第5章
フローチャートを使ったプログラミング5-1 フローチャートとノード
5-1-1 フローチャートとノード
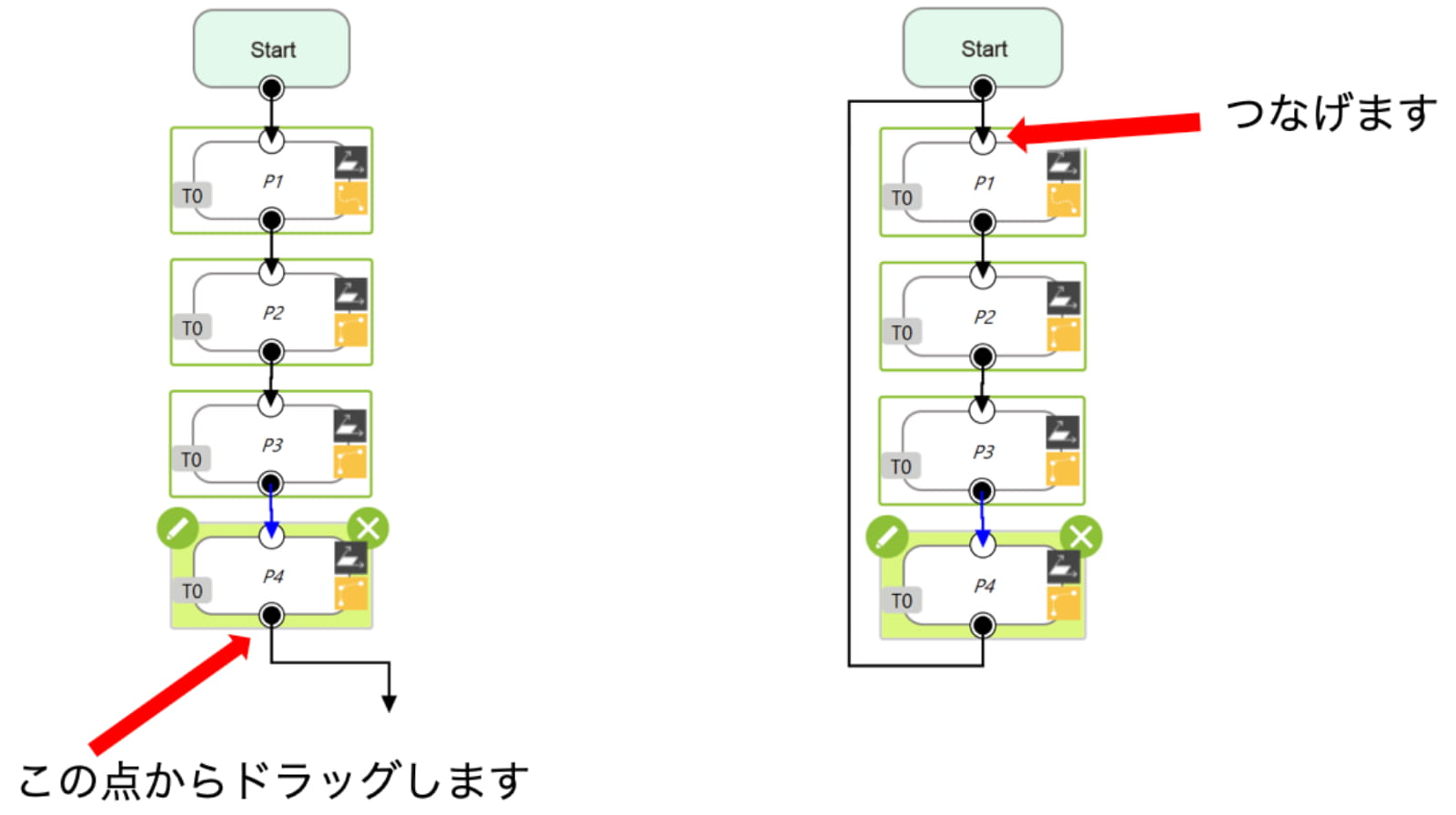
フローチャートにある各ボックスを、「ノード」と呼びます。
下のノードはポイントボタンで作成した「ポイント ノード」です。
3つ目のノードを1つ目のノードにつなげると連続的に動作します。
5-2 ポイント設定
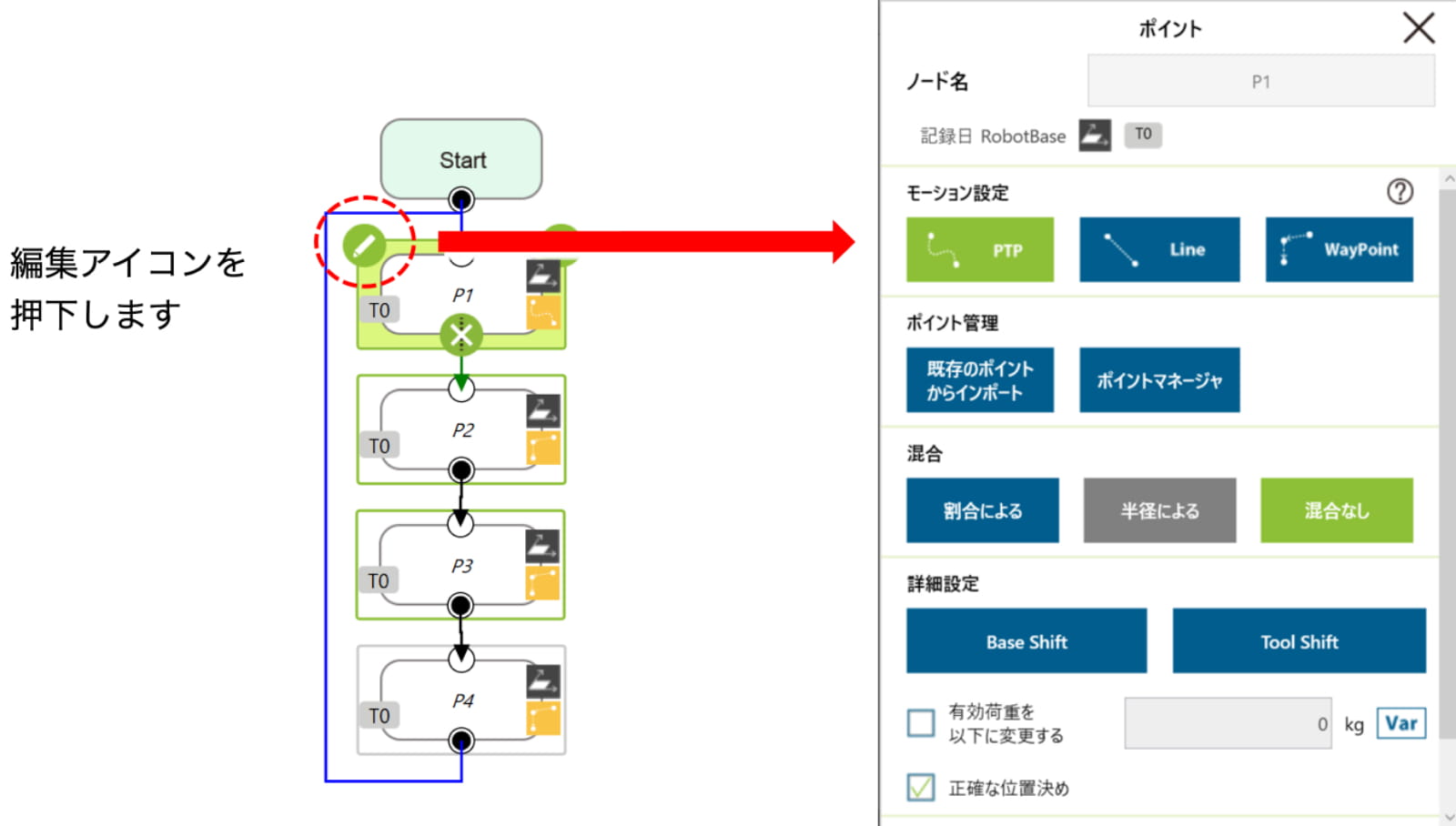
5-2-1 モーション設定
- モーション(ロボットの動作)設定には3つあります。
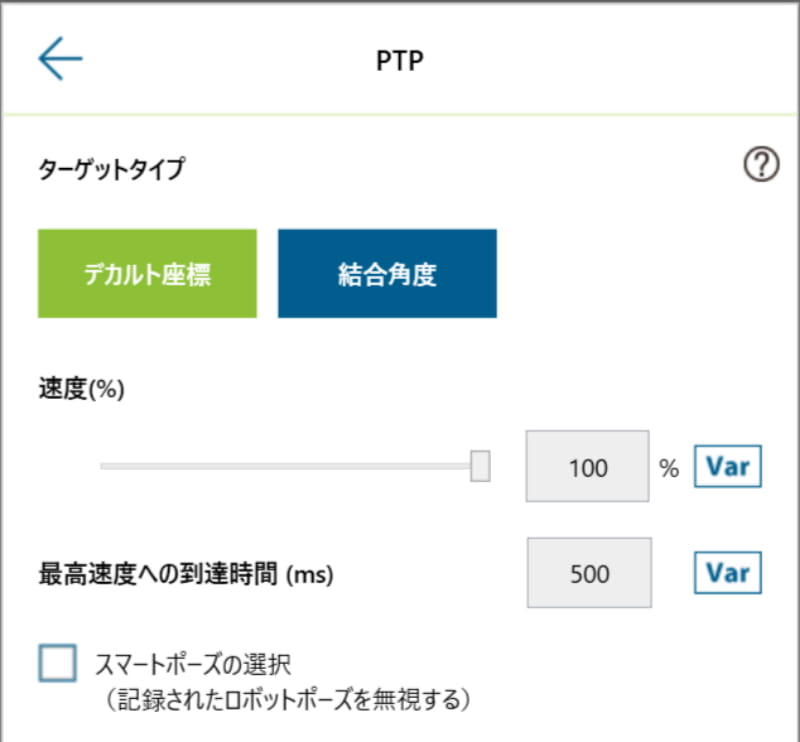
- PTP(ポイントツーポイント)
- Line(ライン)
- WayPoint(ウェイポイント)
5-2-2 PTPとLine
・PTP
ロボットは、この設定をしたポイントへ、最も効率的な関節の動作します。速度もLineよりも早く移動することができます。
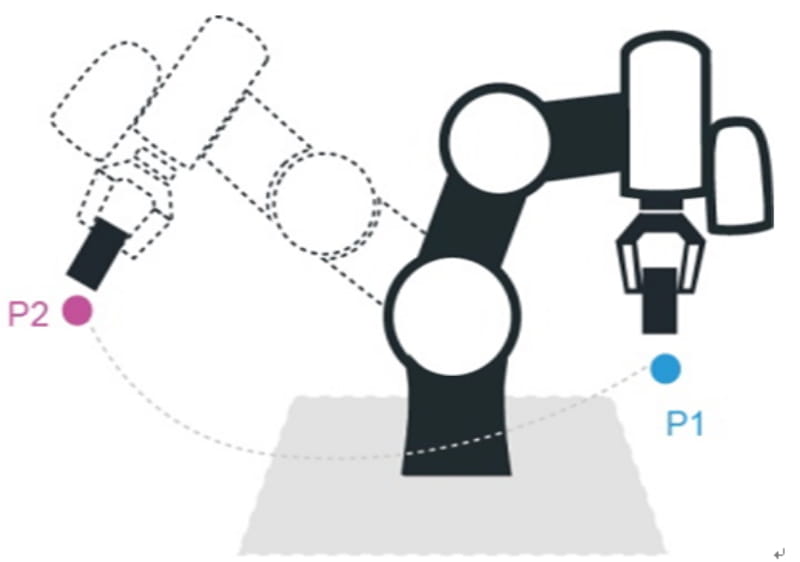
・Line
ロボットは、この設定をしたポイントへ、直線的に移動します。
2つのポイント間の軌道を直線として定義するときに指定します。
5-2-3 速度について
PTPとLine設定時の速度について説明します。
PTP設定時
・移動時間が最も大きい軸の各軸の最大速度に対する%
Line設定時
・指定した速度
・速度割合もしくは絶対速度

注意点
・各ノードでの設定値に対して、プロジェクト速度(TMflowの右上の%)の割合で動作します。
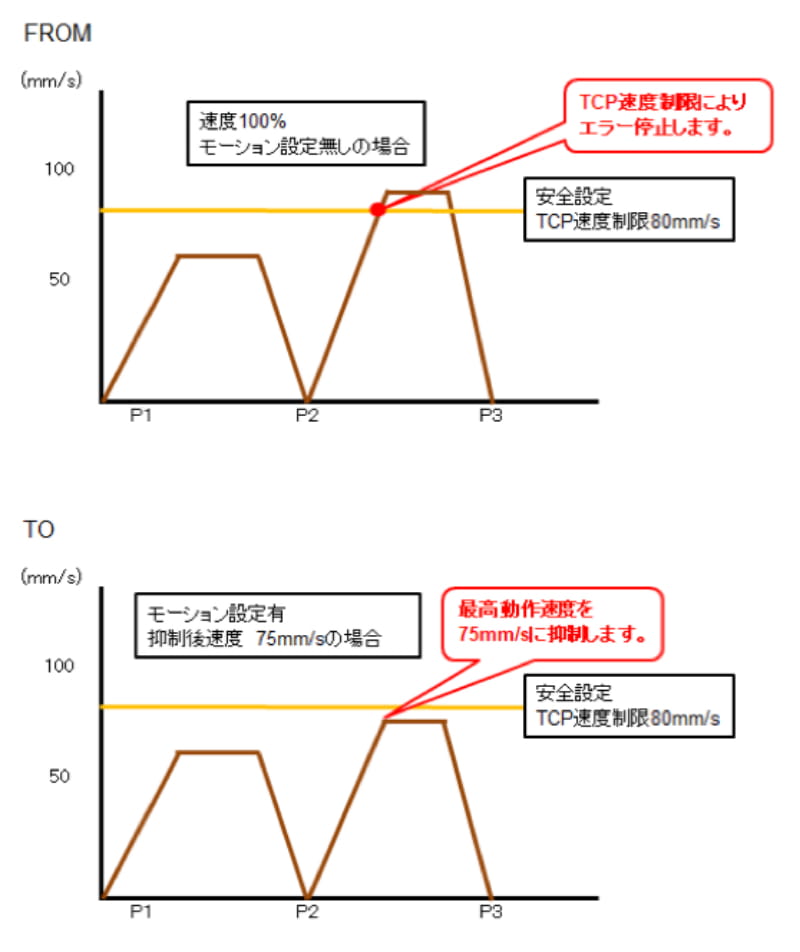
・PTPの場合、腕が伸びているなどの条件によっては、TCPの速度が大きくなり、制限値(セーフティ設定)を超えることがあります。超えた場合は停止します。
・安全設定のTCP速度、ジョイント速度制限を超えてエラー停止しないように、TCP速度、ジョイント速度を抑制する機能としてモーション設定があります。
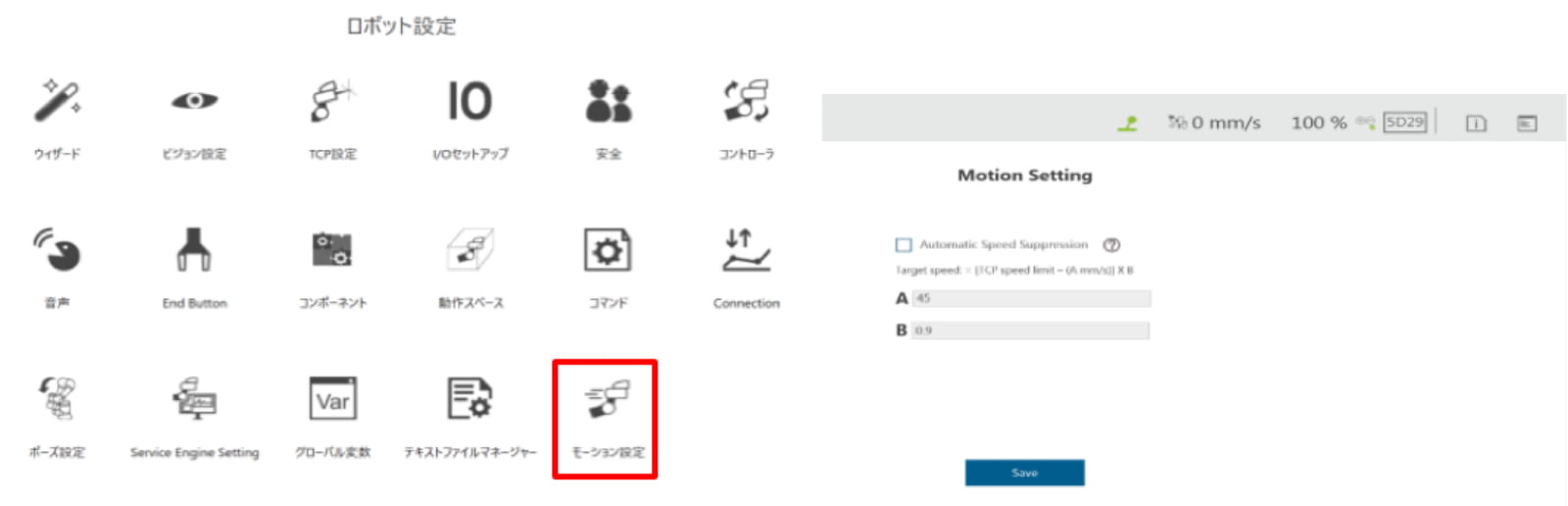
(TMflow Ver.1.8以降)ロボット設定-モーション設定から編集します。
以下式の結果で算出されたスピード以下でロボットが動作します。
抑制後速度 = [(TCP speed limit or ジョイント速度制限) – (A mm/s )] × B
A:抑制速度設定[mm/s]
B:抑制速度係数[%]
「TCP speed limit」 と「各軸の速度制限値」両方の設定で抑制後速度を計算し、抑制後速度の遅い方が適応されます。
ポイントノード以外にも下記のノードに適応されます。
- サークル
- パレット
- 移動
- Fポイント
- タッチストップ(ライン)
- ビジョン(固定小数点)
- ビジョン(サーボ)、パス
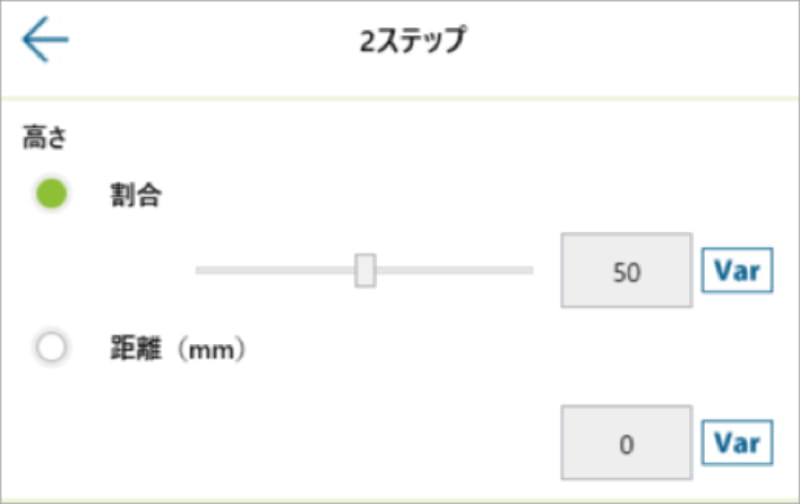
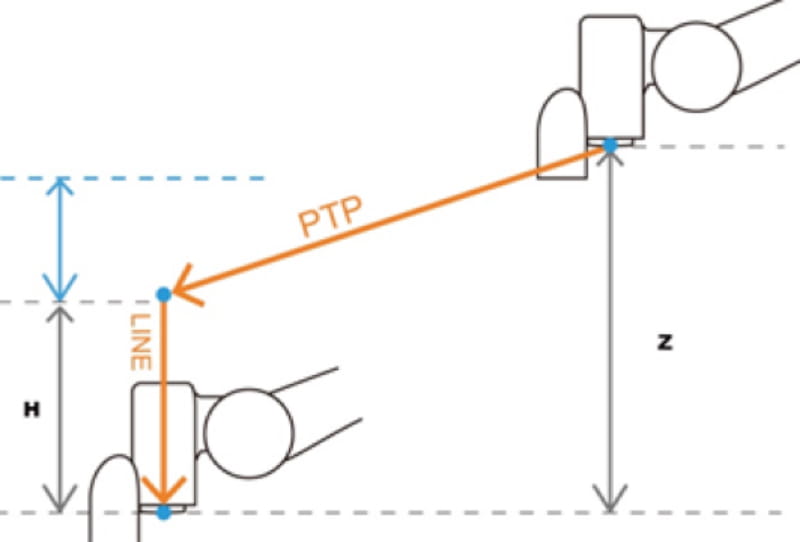
5-2-4 WayPoint
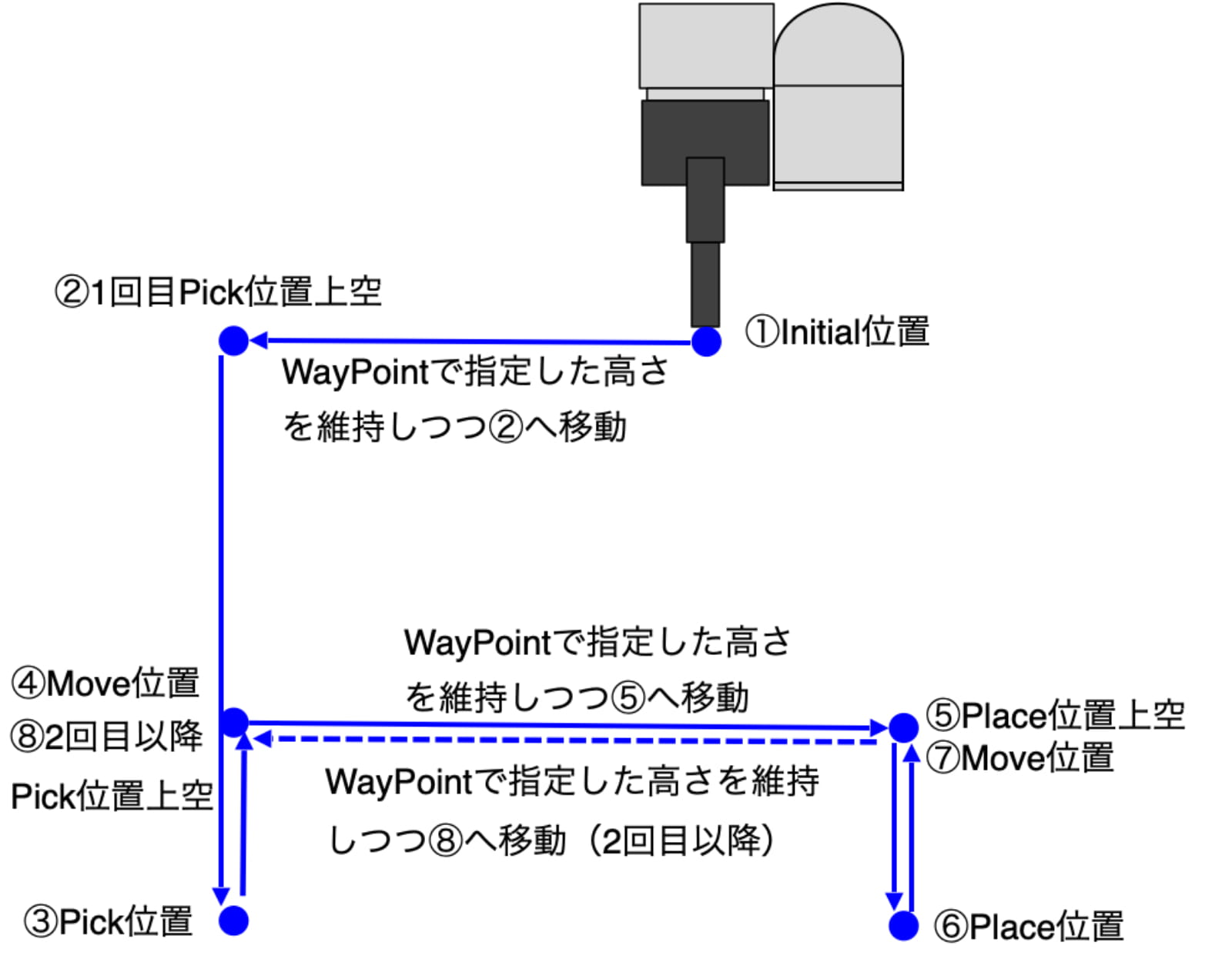
ひとつ前のポイントからこの設定をしたポイントへ移動するとき、ひとつ前のポイントの高さを指定したパラメータ分維持したまま上方まで移動し、次にLine動作でこのポイントへ下がります。
パラメータ:割合(高さ[ = H/Zx100])は、数値が大きいほど、下へは下がらずに設定したポイント上方へ移動します。
WayPointの指定は、Pick&Placeアプリケーションの設定で有効です。
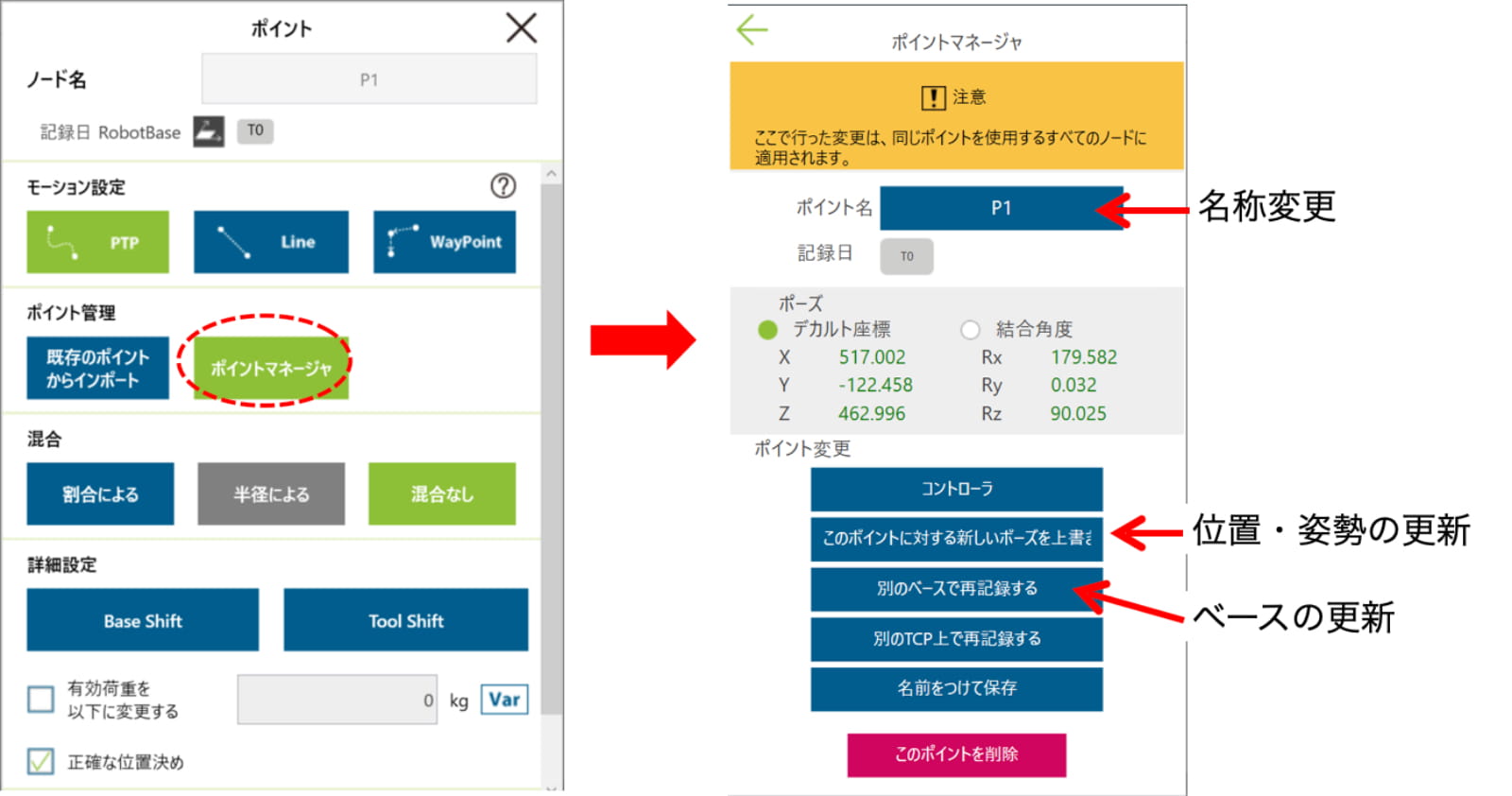
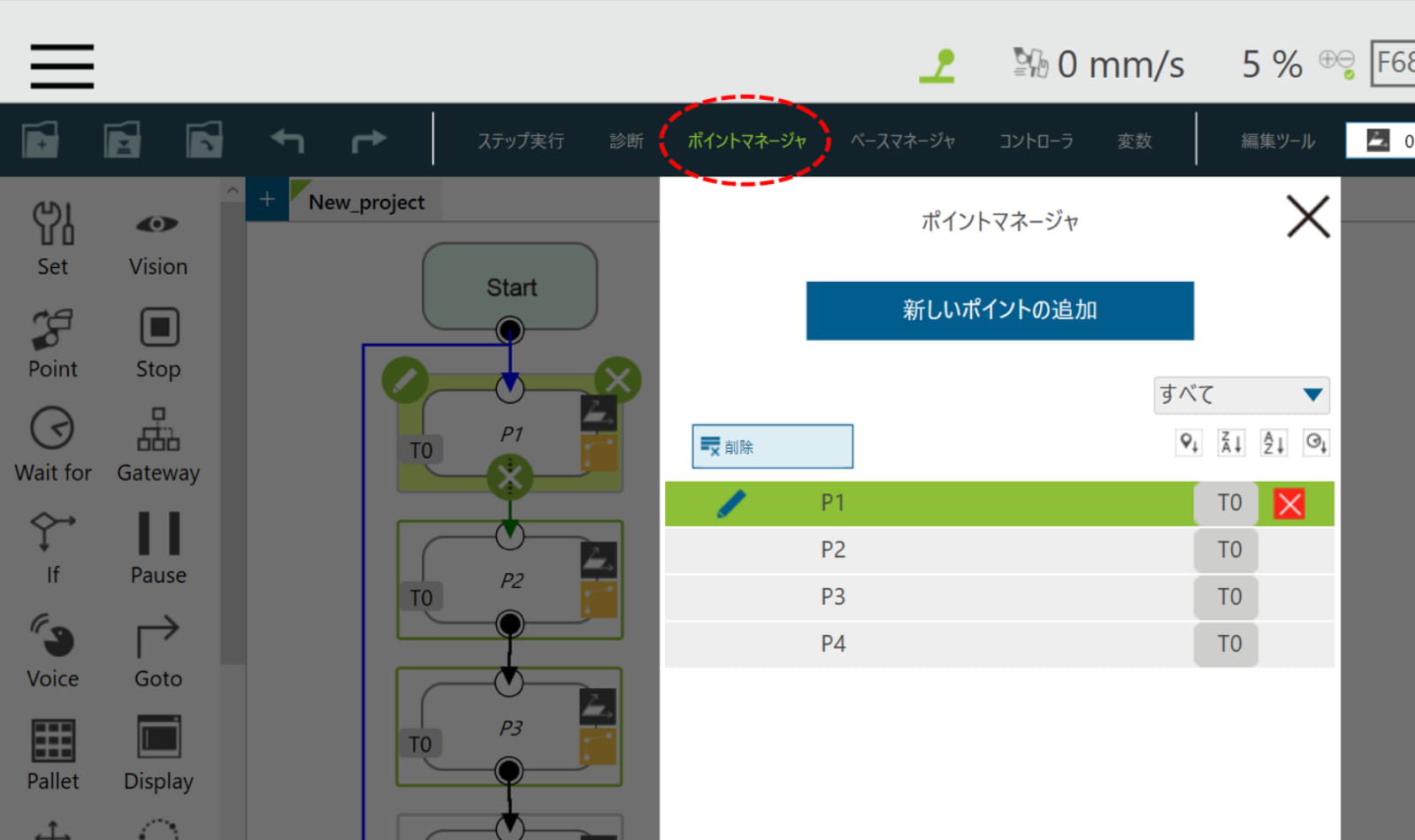
5-2-5 ポイント管理 ~ ポイントマネージャ ~
設定したポイントの名称やベースなどを編集することができます。
ポイントマネージャはプロジェクト編集ツールバーにもあります。
ここでは、プロジェクト内のポイントノードをリスト表示し、「>」を押下すると、ポイント毎のポイントマネージャのダイアログを表示します。
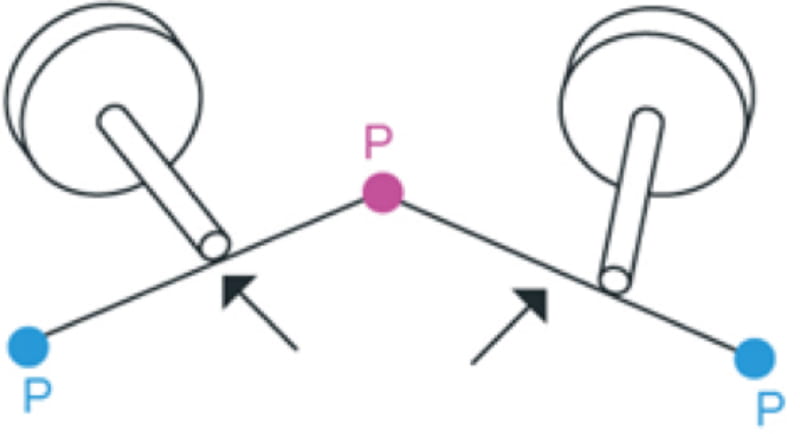
5-2-6 混合
目標位置へ移動する際の動作を混合(ブレンディング)にするかを設定します。
割合(%)、半径(mm)、混合(ブレンディング)なしから選択します。半径は、モーション設定で[Line]を選択したときのみ、設定できます。
混合(ブレンディング)が設定されるポイントは、その位置で停止しなくなります。そのため、ロボットのブレーキ回数が減り、摩耗を低減できたり、サイクル時間を短縮できたりします。
以下の図に示す通り、P1からP3への移動が計画され、P2は、正確に所定の軌道にある必要がない場合、P2ポイントに混合(ブレンディング)を設定します。
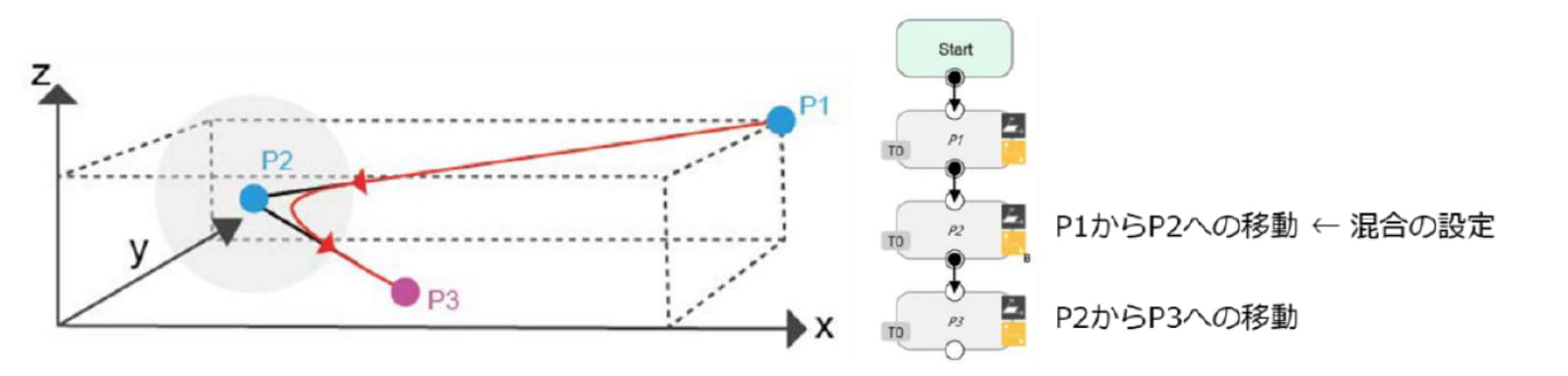
混合(ブレンディング)の設定は、[割合による]か[半径による]から選択します。
ノード名P2(P1からP2への移動)とノード名P3(P2からP3への移動)が以下の設定の場合、混合の設定が有効となります。

5-2-7 ポイントの微調整
設定するポイントの位置を微調整したいとき、ジョグ操作で調整することができます。
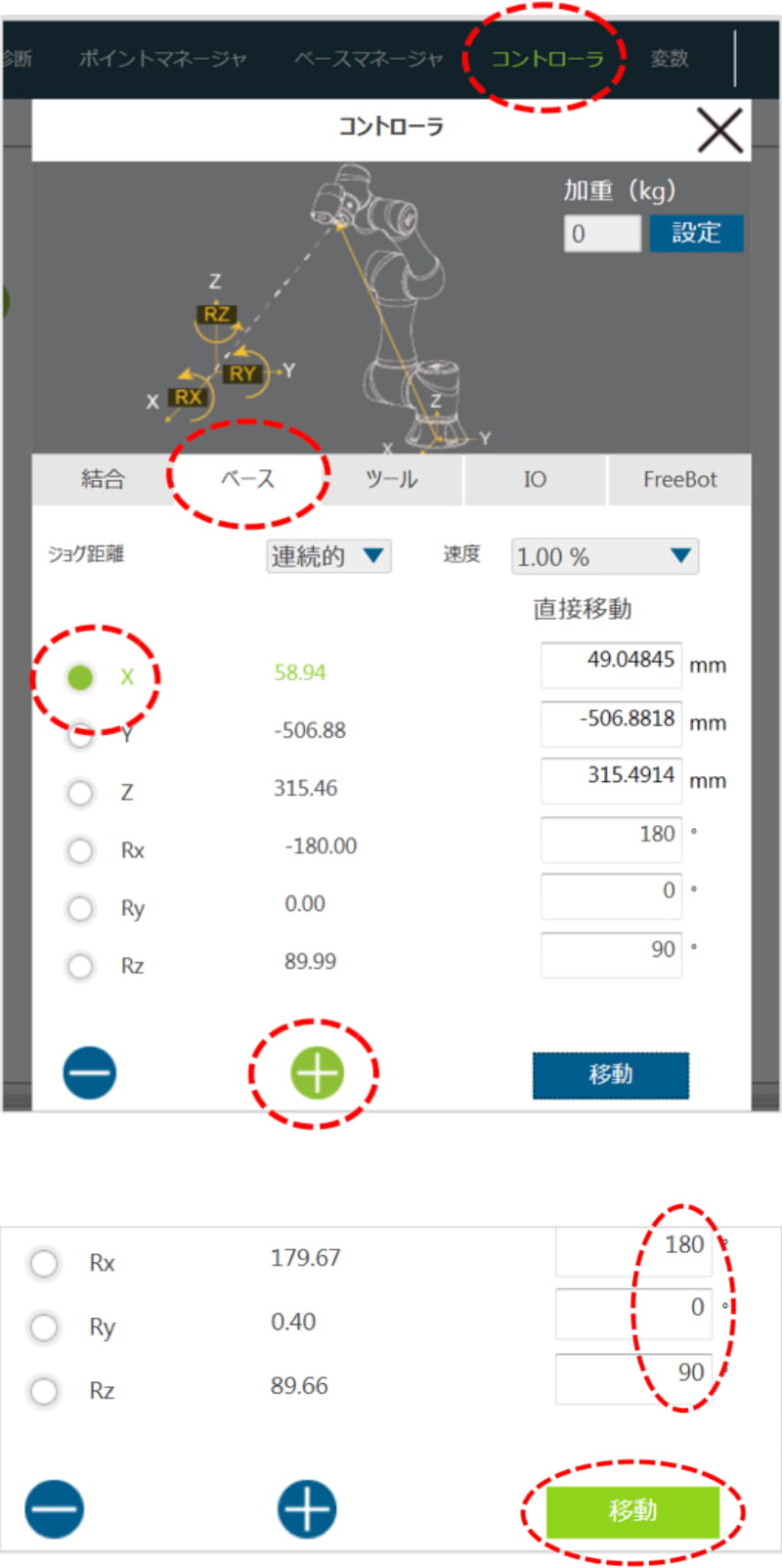
ロボットベースにおいて、TCPをX+方向へ調整する場合、「コントローラ」→「ベース」を押下します。
ラジオボタン「X」を選択し、「+」ボタンを押し続けます。
このとき、ロボットスティックの「+」ボタンも使用できます。
また、グリッパの向きが斜め状態から垂直にしたいとき、Rx、Ry、Rzに値を設定し、「移動」ボタンをグリッパの動きが止まるまで押し続けます。
値は今の値から近い180、90、0などのキリの良い値を設定します。
5-2-8 有効荷重の設定
ポイントノード毎に有効荷重を設定することができます。
有効荷重を設定するには「有効荷重を以下に変更する」のチェックを入れ、設定したい質量[kg]を設定します。(変数による設定も可能)
ここではワーク質量のみを設定してください。ハンド質量はTCP設定で設定します。
ワーク質量とハンド質量の合計がロボットの最大可搬質量を超えないように設定します。
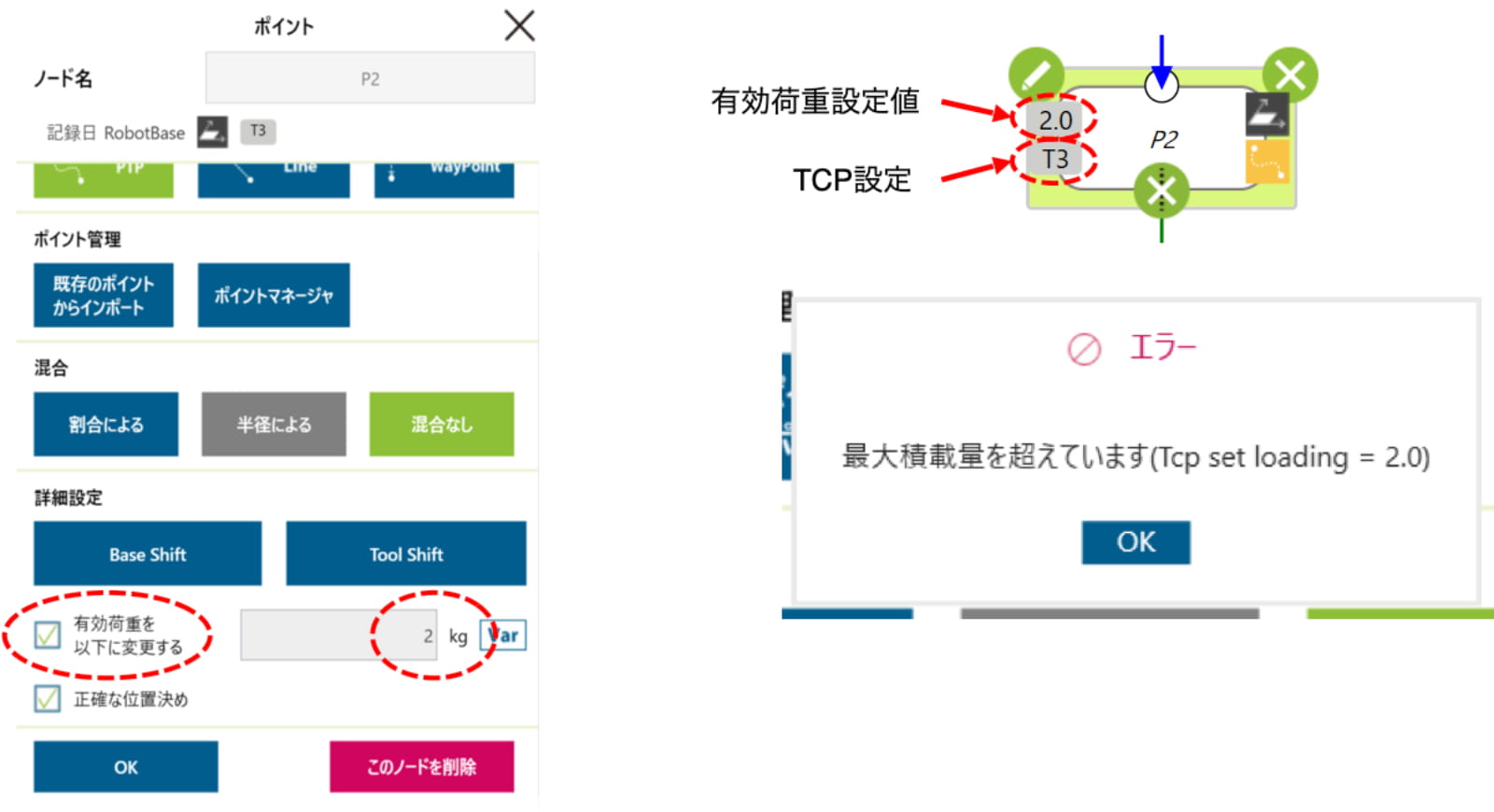
有効荷重の設定がロボットの最大可搬質量を超えた場合は上記のメッセージが表示されます。
例:TM5-900の最大可搬質量(4.0kg)<TCP値(2.0kg)+有効荷重設定値(3.0kg)
5-3 シンプルなPick&Place

5-3-1 動作設定
ロボット動作の流れ
Pick&Placeの動きを作ります。
1.新規プロジェクトを作成します。
機能メニューから「プロジェクト」アイコンを押下します。
2.まず、FREEボタンを押して、ロボットを初期位置へ移動させておきます。
初期位置は、Pick位置とPlace位置の中間上側付近の安全な位置にします。
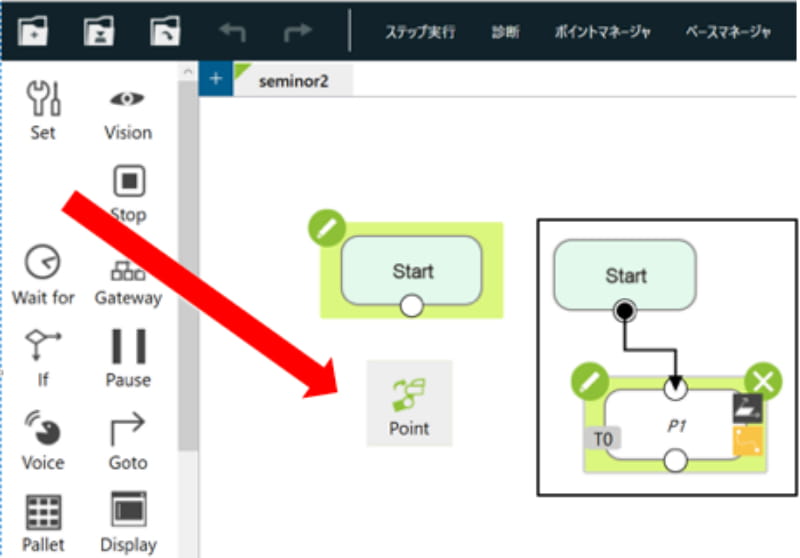
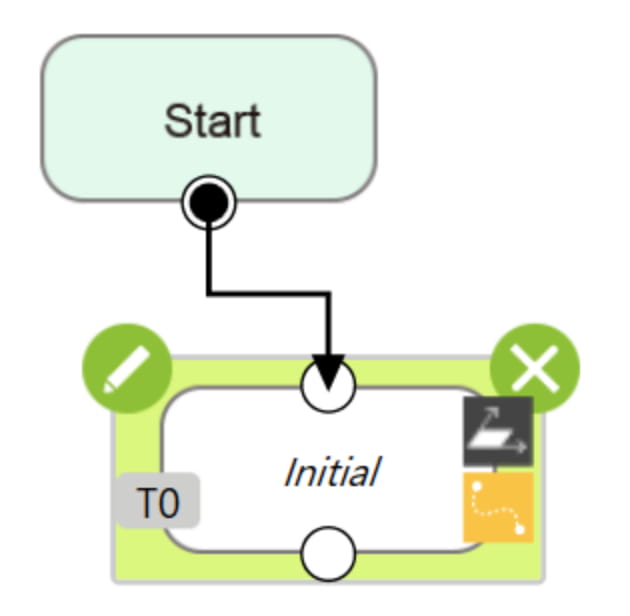
その後、Pointノードをドラッグして、Startノードへつなげます。
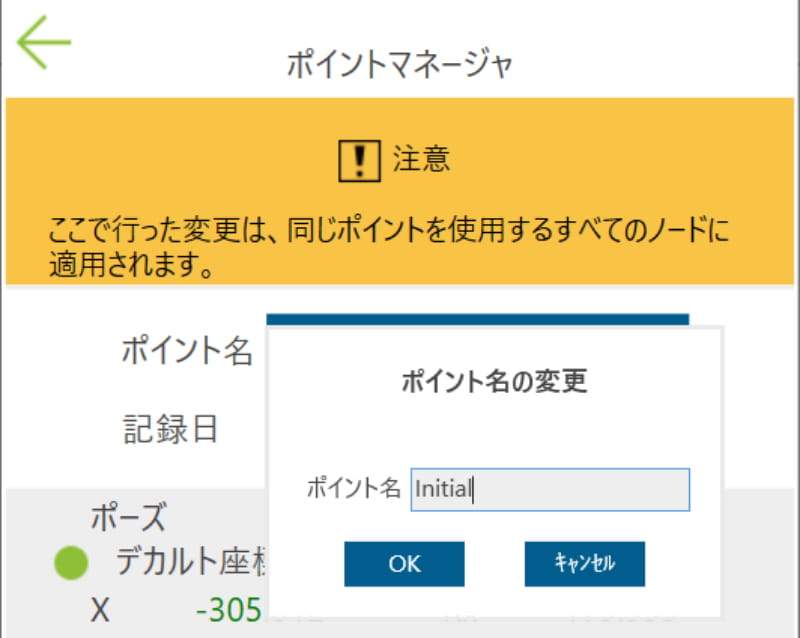
3.ポイントマネージャを開いて、ポイントの名称を「Initial」とします。
OKボタンを押下してプロジェクト編集ページへ戻ります。
4.FREEボタンを押して、ロボットをPick位置へ移動させます。
位置の調整は、「5-2-7 ポイントの微調整」を参考にジョグ操作します。
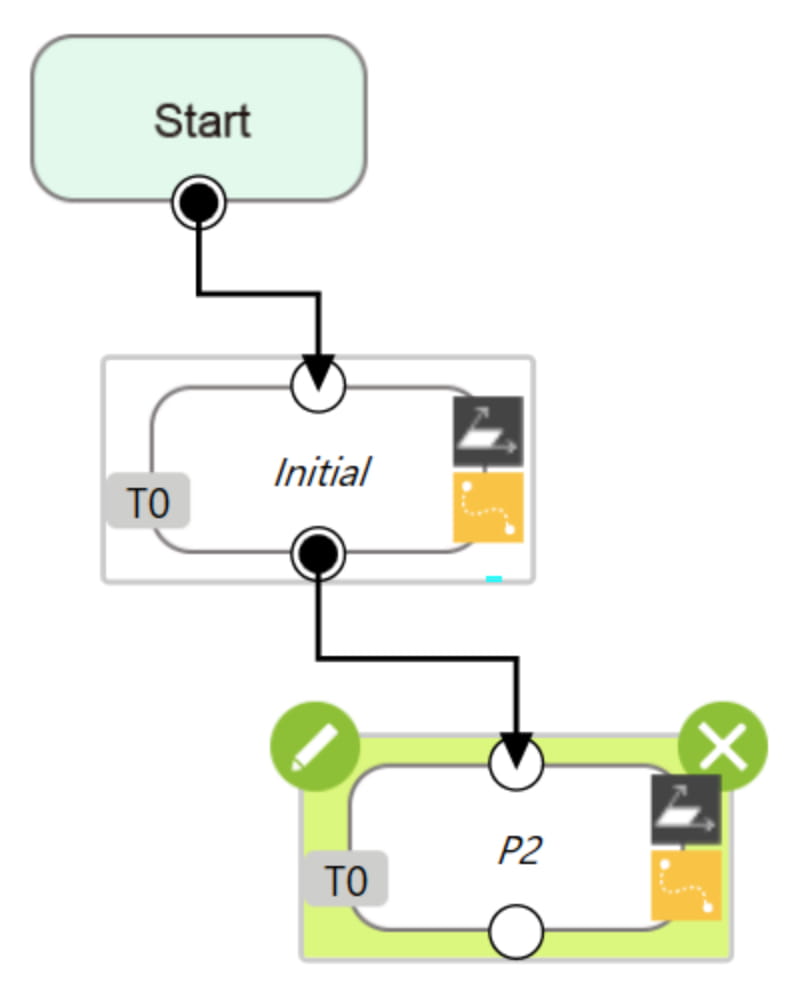
5.Initialノードが選択された状態であることを確認します。よければ、Pointノードをドラッグし、Initialノードへつなげます。
ノードをドラッグしてつなげる時、つなげ先は常に選択されたノードになります。
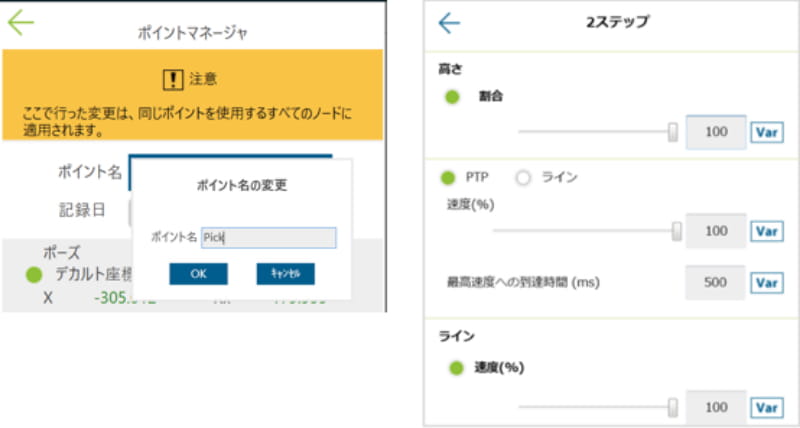
6.ポイントマネージャで名称を「Pick」とします。
WayPointで「高さ」を100%へ変更します。
OKボタンを押下してプロジェクト画面へ戻ります。
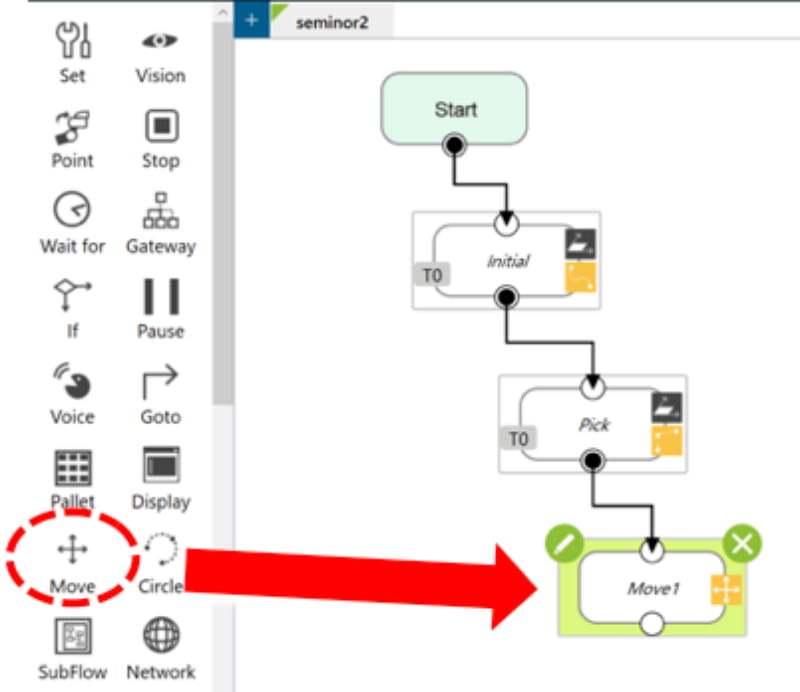
7.PickノードへMoveノードをドラッグしてつなげます。
8.Moveノードの編集アイコンを押下します。
「移動設定」でZを -200㎜とします。
この移動はツールベース(Moveノードのデフォルト設定)での移動なので、ツールは上へ移動していきます。(RobotベースからみるとZ+方向へ移動)
OKボタンを押下してプロジェクト編集ページへ戻ります。

9.FREEボタンを押して、ロボットをPlace位置へ移動させます。
10.Pointノードをドラッグして、Moveノードへつなげます。
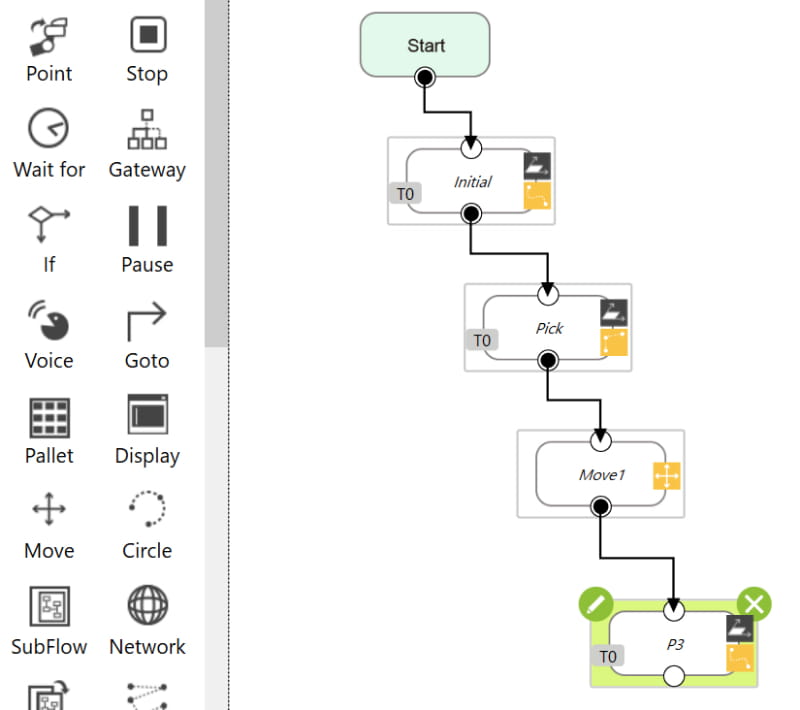
11.ポイントマネージャで名称を「Place」とします。
WayPointで「高さ」を100%へ変更します。
OKボタンを押下してプロジェクト編集ページへ戻ります。

12.PlaceノードへMoveノードをドラッグしてつなげます。
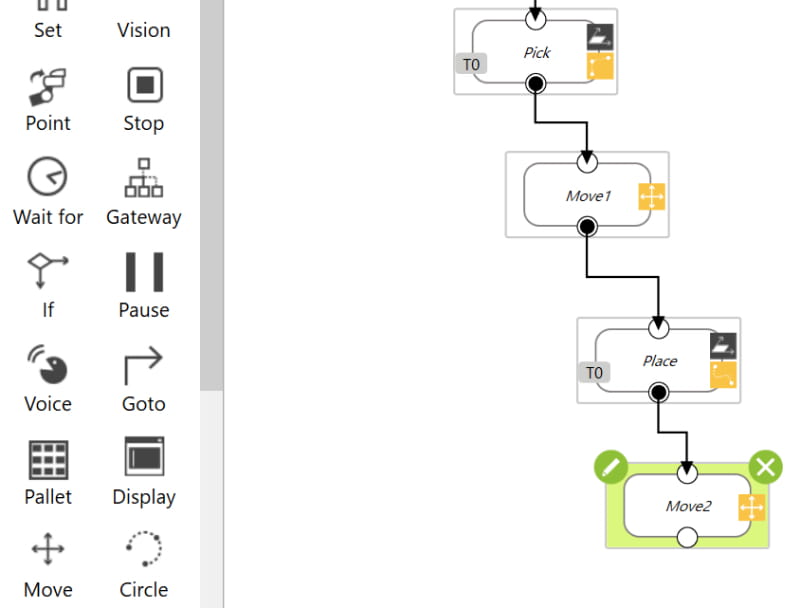
13.Moveノードの編集アイコンを押下します。
「移動設定」でZを -200㎜とします。
OKボタンを押下してプロジェクト編集ページへ戻ります。

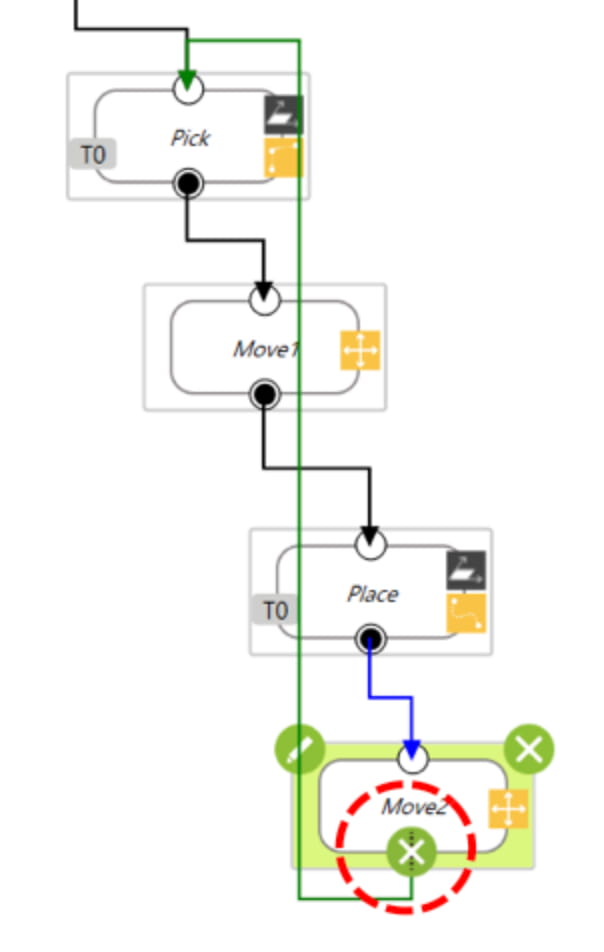
14.Move2ノードをPickノードの上へつなげます。
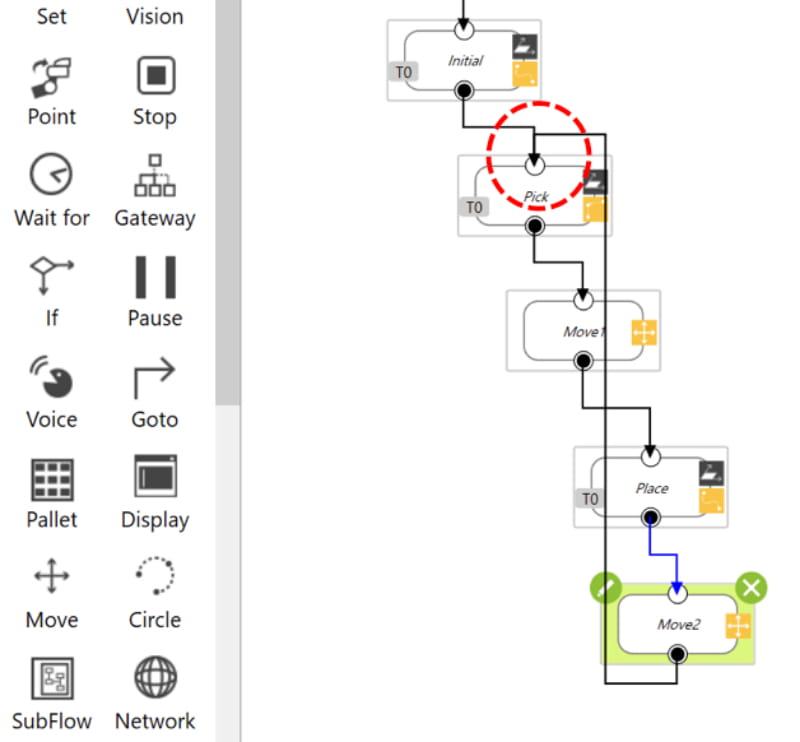
15.もし、一度つなげた線を削除したいのであれば、出発側のノードを選択し、Xアイコンを押下します。
16.以上でPick&Placeのプログラムは完成です。
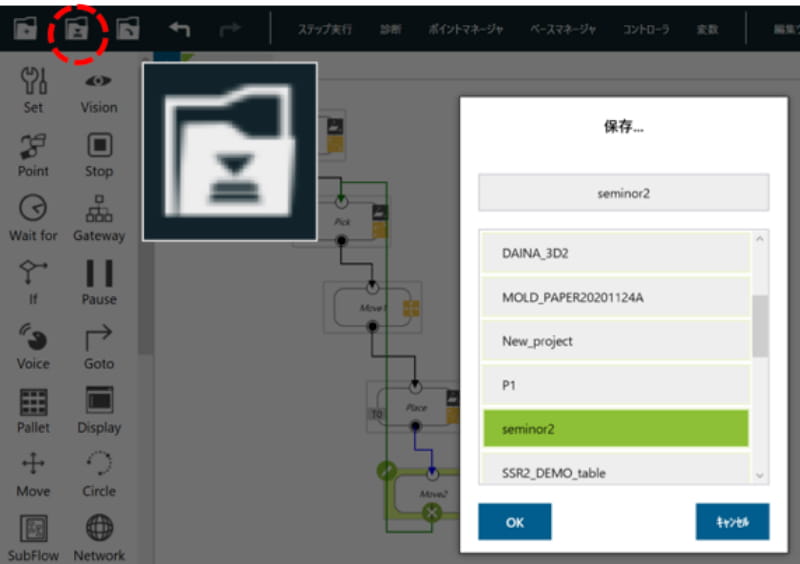
完成したら、忘れずに左上隅の保存アイコンを押下し、OKボタンを押下して上書き保存してください。
17.ロボットスティックの実行/一時停止ボタンを押下して、プログラムを実行させます。
18.ロボットスティックの+/-ボタンを押下すると、動作速度を変更することができます。
速度は画面右上に%で表示されます。
マニュアルモードでプログラム実行すると、必ず5%の速度ではじまります。
- 第1章 はじめに
- 1-1 協調ロボット
- 1-2 TMシリーズ
- 1-3 安全について
- 第2章 協調ロボット TMシリーズ
- 2-1 基本構成
- 2-2 ハードウェア
- 2-3 ソフトウェア
- 2-4 周辺機器
- 2-5 座標系(ベース)
- 2-6 特異点
- 2-7 TCP
- 2-8 設置条件
- 第4章 基本動作のプログラミング
- 4-1 ログイン
- 4-2 初回起動時にすべきこと
- 4-3 ティーチング
- 4-4 緊急スイッチ(E-STOP)からの復帰
- 4-5 FreeBotコントロール
- 4-6 協調(協働)モードの設定
- 4-7 デカルト制限
- 第5章 フローチャートを使ったプログラミング
- 5-1 フローチャートとノード
- 5-2 ポイント設定
- 5-3 シンプルなPick&Place
- 第6章 グリッパーの取付け方法
- 6-1 エンドエフェクタの使用準備
- 6-2 グリッパー コンポーネント
- 6-3 グリッパーボタン
- 第7章 キャリブレーションとビジョンノード
- 7-1 カメラ
- 7-2 ビジョン キャリブレーション
- 7-3 ビジョンノードとタスクデザイナー
- 7-4 パターンマッチング(形状)
- 7-5 ブロブファインダ
- 7-6 Visionベース
- 第8章 カメラを使ったP&P動作の設定
- 8-1 Pick&Place
- 参考 ステップ実行
- 8-2 TM Landmarkを使ったP&P
- 8-3 TM Landmarkへ関連づけたP&P
- 参考 プログラムのスタイル