TMプログラミングセミナ
協調ロボット TMシリーズプログラミングトレーニングコース
- 第1章 はじめに
- 1-1 協調ロボット
- 1-2 TMシリーズ
- 1-3 安全について
- 第2章 協調ロボット TMシリーズ
- 2-1 基本構成
- 2-2 ハードウェア
- 2-3 ソフトウェア
- 2-4 周辺機器
- 2-5 座標系(ベース)
- 2-6 特異点
- 2-7 TCP
- 2-8 設置条件
- 第4章 基本動作のプログラミング
- 4-1 ログイン
- 4-2 初回起動時にすべきこと
- 4-3 ティーチング
- 4-4 緊急スイッチ(E-STOP)からの復帰
- 4-5 FreeBotコントロール
- 4-6 協調(協働)モードの設定
- 4-7 デカルト制限
- 第5章 フローチャートを使ったプログラミング
- 5-1 フローチャートとノード
- 5-2 ポイント設定
- 5-3 シンプルなPick&Place
- 第6章 グリッパーの取付け方法
- 6-1 エンドエフェクタの使用準備
- 6-2 グリッパー コンポーネント
- 6-3 グリッパーボタン
- 第7章 キャリブレーションとビジョンノード
- 7-1 カメラ
- 7-2 ビジョン キャリブレーション
- 7-3 ビジョンノードとタスクデザイナー
- 7-4 パターンマッチング(形状)
- 7-5 ブロブファインダ
- 7-6 Visionベース
- 第8章 カメラを使ったP&P動作の設定
- 8-1 Pick&Place
- 参考 ステップ実行
- 8-2 TM Landmarkを使ったP&P
- 8-3 TM Landmarkへ関連づけたP&P
- 参考 プログラムのスタイル
おことわり
(1)本書の内容の一部または全部を無断で転載、複製することは禁止されています。
(2)本書の内容に関しては、改良のため予告なしに仕様などを変更することがありますのでご了承ください。
本書に記載の回路構成、結線方法、プログラム等は、一般的な代表例です。
ご採用に関しては、構成する商品の取扱説明書あるいはマニュアルをお読みいただき、ご了承事項、仕様、性能、安全性についてご確認をお願いいたします。
なお、製品取り扱い上の安全に関する事項は、全てユーザーズマニュアルを優先お願いいたします。
解説動画
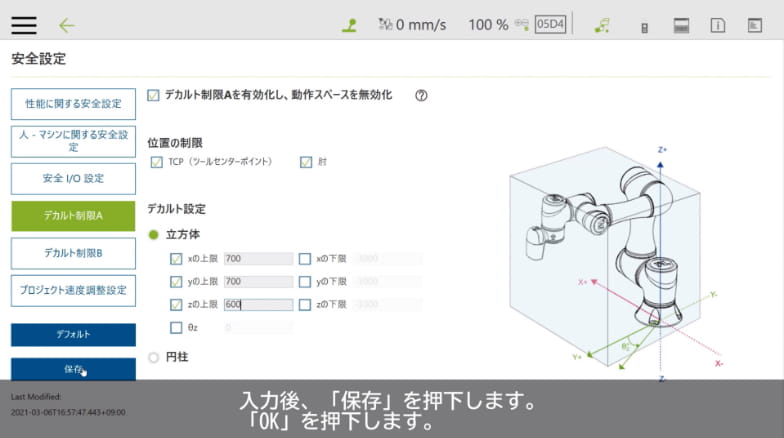
4-7章
デカルト制限
この動画では、安全機能のデカルト制限の設定手順と動作を説明します。
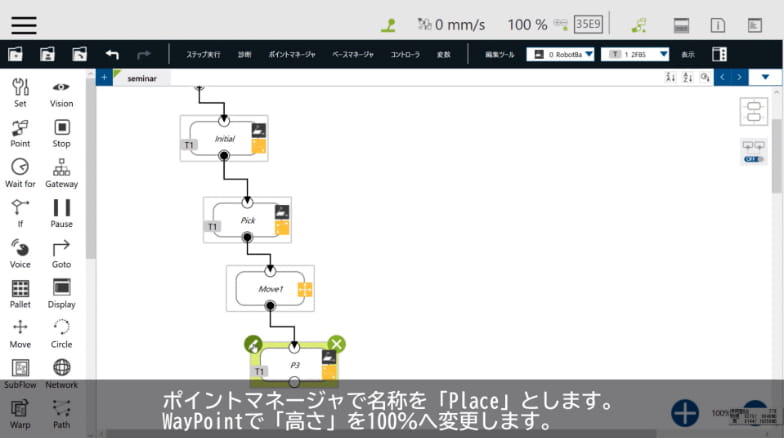
5-3章
シンプルなPick&Place
この動画では、カメラを使用しない、固定点への移動によるシンプルなPick&Place動作用プログラム作成手順と動作を説明します。
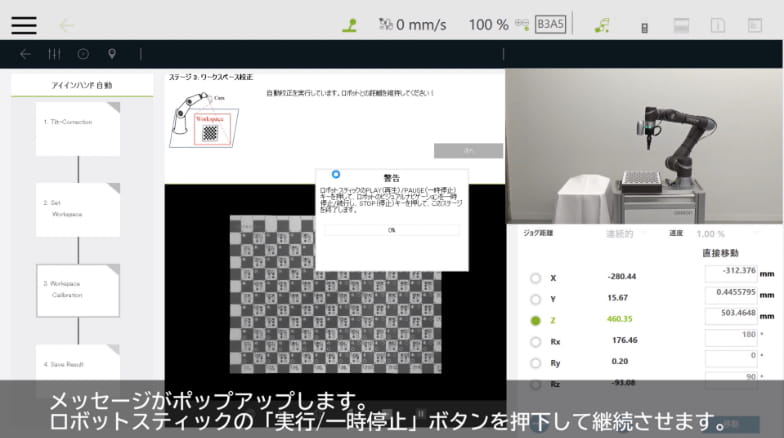
7-2章
ビジョンキャリブレーション
この動画では、カメラを使用したPick&Place動作を行うためのキャリブレーション操作と動作を説明します。
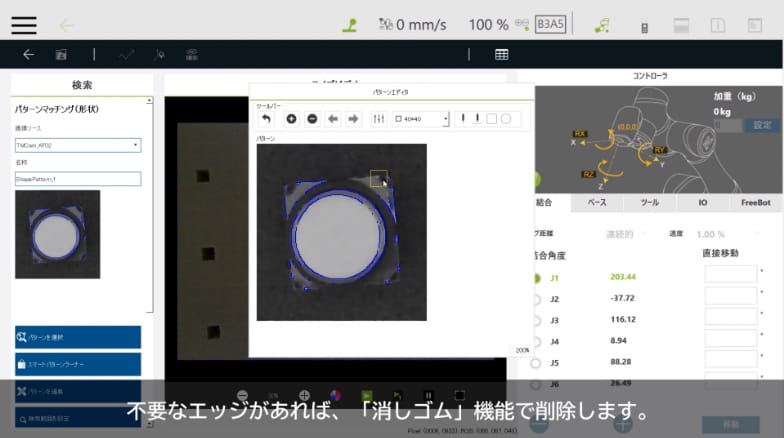
7-4章
パターンマッチング(形状)
この動画では、カメラで形状が一定なワークを認識するための検出機能、パターンマッチングの設定手順を説明します。

7-5章
ブロブファインダ
この動画では、カメラで不定形なワークを認識するための検出機能、ブロブファインダの設定手順を説明します。

8-1章
Pick&Place
この動画では、カメラによりワーク検出したシンプルなPick&Place動作用プログラム作成手順と動作を説明します。

8-2章
TM Landmarkを使ったPick&Place
この動画では、ロボットを移設利用を簡単に行えるランドマークを使用したPick&Place動作用プログラム作成手順と動作を説明します。
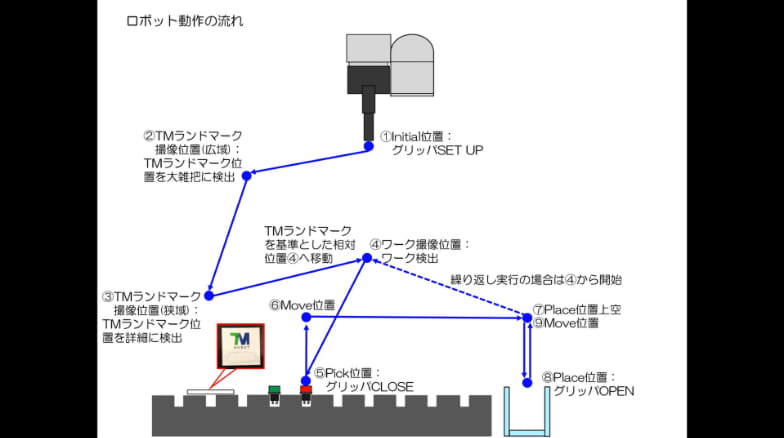
8-3章
TM Landmarkへ関連付けたPick&Place(1)
この動画では、8-2章で使用したランドマークにより、都度変化する複数ワークを検出してPick&Placeを行う動作用プログラム作成手順を説明します。
8-3章
TM Landmarkへ関連付けたPick&Place(2)
この動画では、傾きのない作業台上のワークのPick&Place動作紹介します。

8-3章
TM Landmarkへ関連付けたPick&Place(3)
この動画では、傾きの有る作業台上のワークのPick&Place動作を紹介します。
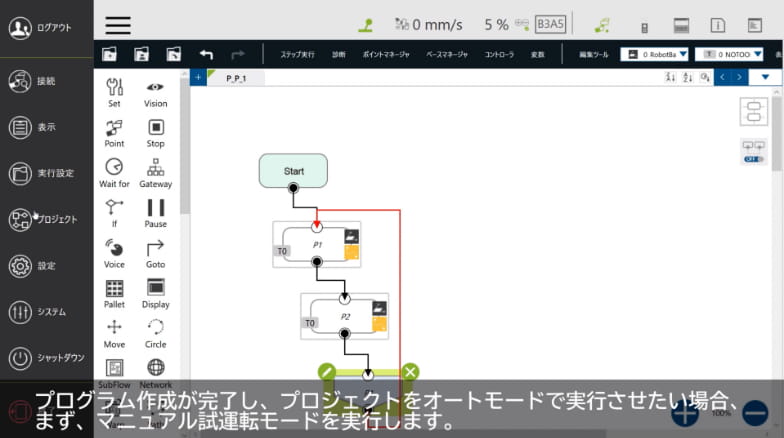
9-5章
オートモードで実行
この動画では、プログラム作成が完了後、オートモードで動作させるまでの操作を説明します。
お客様へ:安全に関しては、必ずマニュアルおよびハードウエア設置マニュアルを参照してください。