リスク低減方策の例
ステップ1:本質的安全設計方策
3ステップメソッドのうち一番はじめに検討しなければならないのは「本質的安全設計方策」です。ISO 12100では、以下のような例があげられています。
- 形状的要因の考慮
- 物理的側面の考慮
- 一般的技術知識の考慮
- 危険源を除去又はリスクを低減するための適切な技術の選択
- ポジティブな機械的作用の原理の適用
- 安定性の確保
- 保全性の確保
- 人間工学原則の遵守
- 電気的危険源の考慮
- 空圧・液圧装置の危険源の考慮
- 装置の信頼性による危険源への暴露制限
- 搬入・搬出作業の機械化・自動化による危険源への暴露制限
- 設定・保全の作業位置の危険区域外への配置による危険源への暴露制限

形状的要因の考慮の例:鋭利な端部の回避

形状的要因の考慮の例:作動力の低減
本質的安全設計方策として具体的にどのような手法を用いるかについては、リスク低減の効果を考えることはもちろん、その手法をとることによって新たな危険源が生じないかについても考慮して、決定する必要があります。そのためには、例えば以下のような観点が有効です。
- ロボットなどの可動要素の能力、仕様の最適化(サイズ、制御軸数、可動範囲など)
- 作業者と機械の可動要素との位置関係によって暴露する可能性のある危険源(機械的危険、熱的危険など)
- 作業性(ワーク取扱い、繰り返し操作、手動操作など)
- ティーチング作業の操作性(操作手順、操作位置など)
- 保全作業の安全性(視認性、メインブレーカのロックアウト・タグアウト、空圧回路の残圧排気機構など)
ステップ2:安全防護及び付加保護方策
二番目に検討するのは、「安全防護」と「付加保護方策」です。
安全防護としては、以下のような方策が考えられます。
- インターロックなしのガード
- インターロック付きガード
- セーフティセンサ (ESPE)
- 圧力検知式保護装置 (PSPD)
- その他の検知保護装置 (SPE)
- 安定性のための保護方策
- その他の保護装置
- エミッションを低減するための安全防護
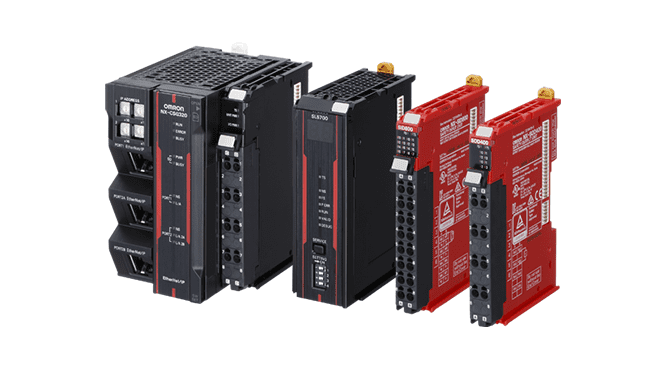
- 安全関連制御 (SRP/CS, SCS)
安全機器を用いたリスク低減の詳細については、安全機器を用いたリスク低減をご覧ください。
また、付加保護方策としては、以下のようなものがあげられます。
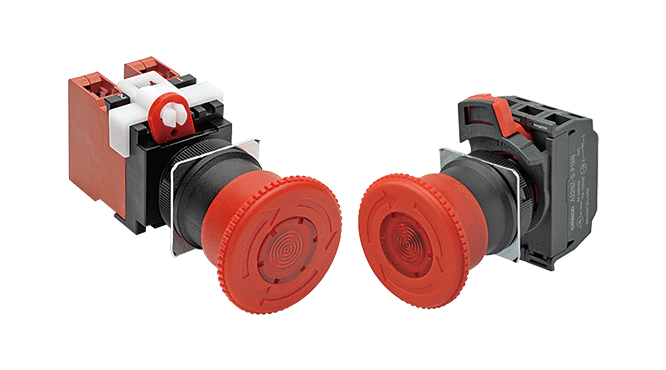
- 非常停止機能
- 捕捉された人の脱出・救助の手段
- 動力供給の遮断時・蓄積エネルギ消散時のための方策
- 機械・重量構成部品の取扱いのための方策
- 機械への安全な接近手段

非常停止装置の例

施錠可能な遮断装置の例
ステップ3:使用上の情報
機械の使用者に注意を促したり安全な作業手順を伝えたりするための「使用上の情報」は、3ステップメソッドの一番最後に行う方策です。ISO 12100には以下のような例が示されています。
- 使用上の情報の記載(機械本体、機械の附属文書、梱包上、その他の場所)
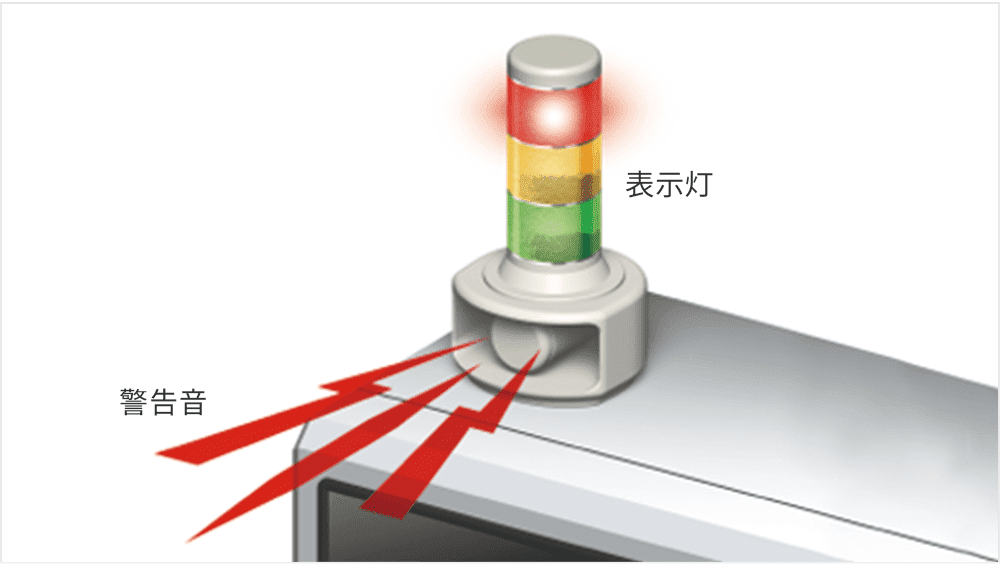
- 信号・警報装置
- 表示・標識・警告文
- 使用者による保護方策(組織、追加安全防護物、保護具、訓練など)
- 使用上の情報としてのその他の方策