8-3章
TM Landmarkへ関連付けたPick&Place(3)傾きの有る作業台上のワークのPick&Place動作を紹介します。
再生時間:2:18
4-7章
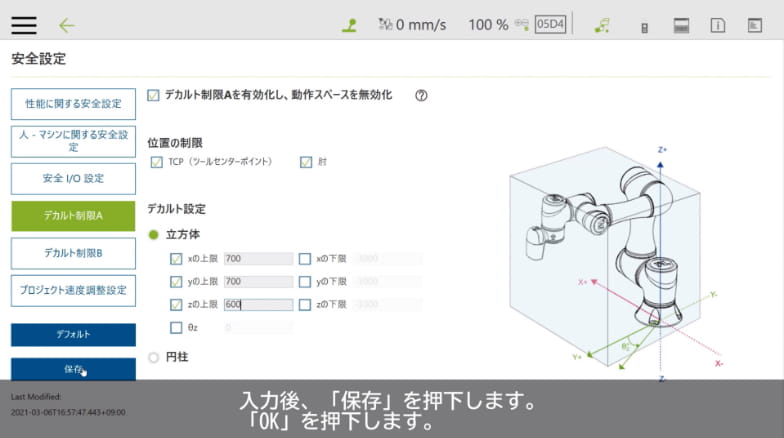
デカルト制限
この動画では、安全機能のデカルト制限の設定手順と動作を説明します。
5-3章
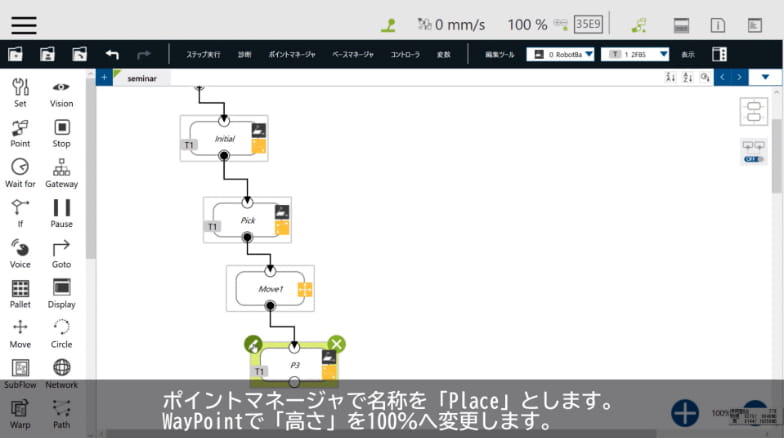
シンプルなPick&Place
この動画では、カメラを使用しない、固定点への移動によるシンプルなPick&Place動作用プログラム作成手順と動作を説明します。
7-2章
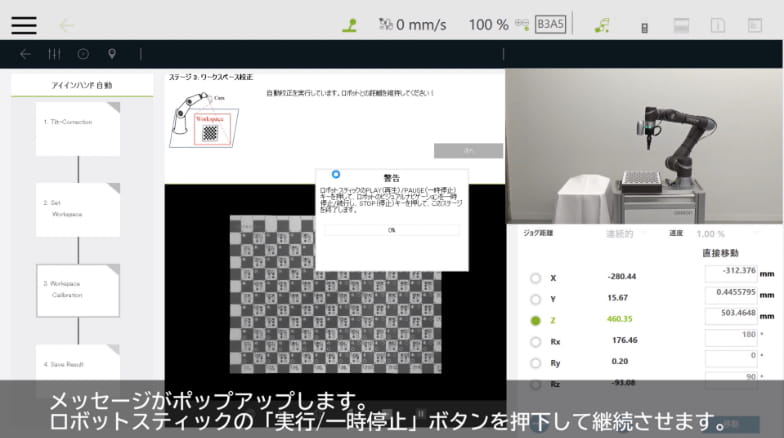
ビジョンキャリブレーション
この動画では、カメラを使用したPick&Place動作を行うためのキャリブレーション操作と動作を説明します。
7-4章
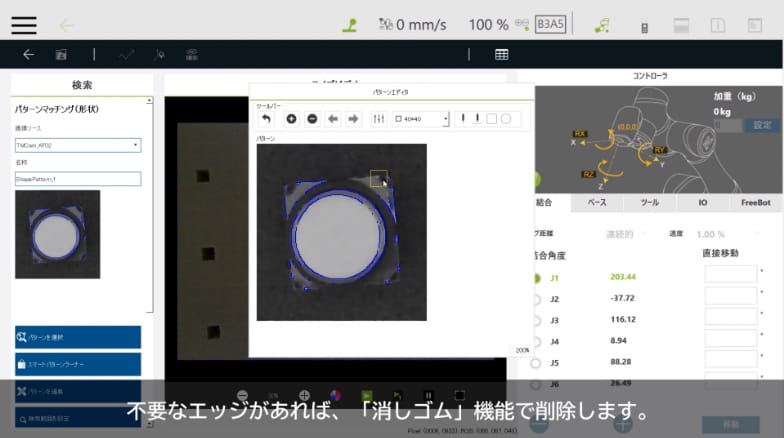
パターンマッチング(形状)
この動画では、カメラで形状が一定なワークを認識するための検出機能、パターンマッチングの設定手順を説明します。

7-5章
ブロブファインダ
この動画では、カメラで不定形なワークを認識するための検出機能、ブロブファインダの設定手順を説明します。

8-1章
Pick&Place
この動画では、カメラによりワーク検出したシンプルなPick&Place動作用プログラム作成手順と動作を説明します。

8-2章
TM Landmarkを使ったPick&Place
この動画では、ロボットを移設利用を簡単に行えるランドマークを使用したPick&Place動作用プログラム作成手順と動作を説明します。
8-3章
TM Landmarkへ関連付けたPick&Place(1)
この動画では、8-2章で使用したランドマークにより、都度変化する複数ワークを検出してPick&Placeを行う動作用プログラム作成手順を説明します。
8-3章
TM Landmarkへ関連付けたPick&Place(2)
この動画では、傾きのない作業台上のワークのPick&Place動作紹介します。

8-3章
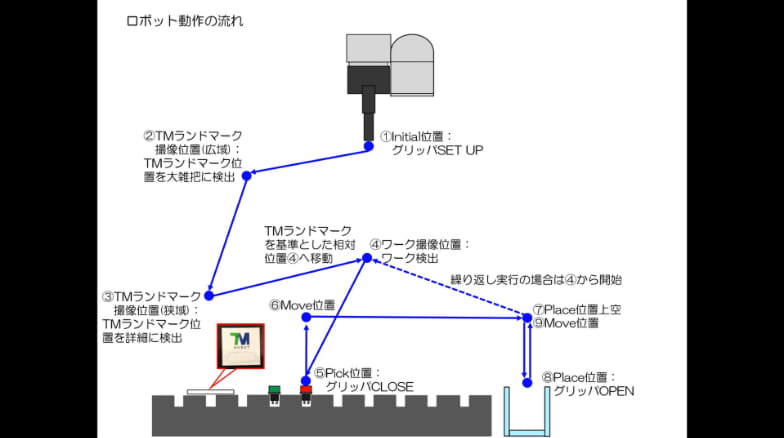
TM Landmarkへ関連付けたPick&Place(3)
この動画では、傾きの有る作業台上のワークのPick&Place動作を紹介します。
9-5章
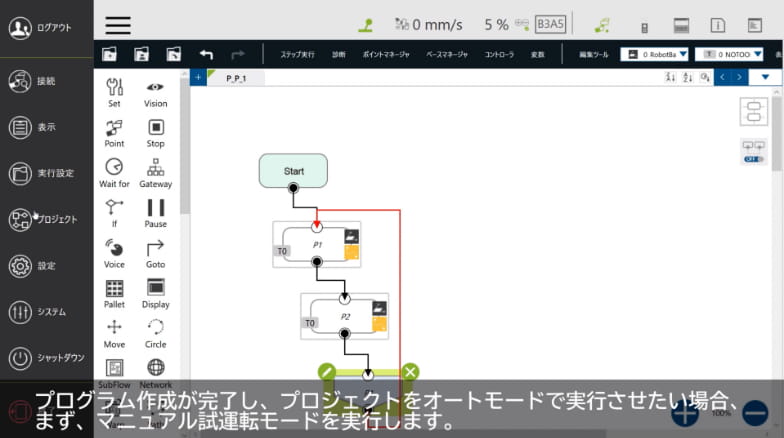
オートモードで実行
この動画では、プログラム作成が完了後、オートモードで動作させるまでの操作を説明します。
お客様へ:安全に関しては、必ずマニュアルおよびハードウエア設置マニュアルを参照してください。