Visit our international website Omron IA global
商品情報トップ
関連情報
ソリューショントップ
現場の異常にすばやく対応できるシステムをテンプレート活用で簡単構築
現場と経営の情報連携プラットフォームを専門的なIT知識不要で構築
ダウンロードセンタトップ
サービスサポートトップ
eラーニング・セミナトップ
オムロンの提供価値トップ
販売ネットワークトップ
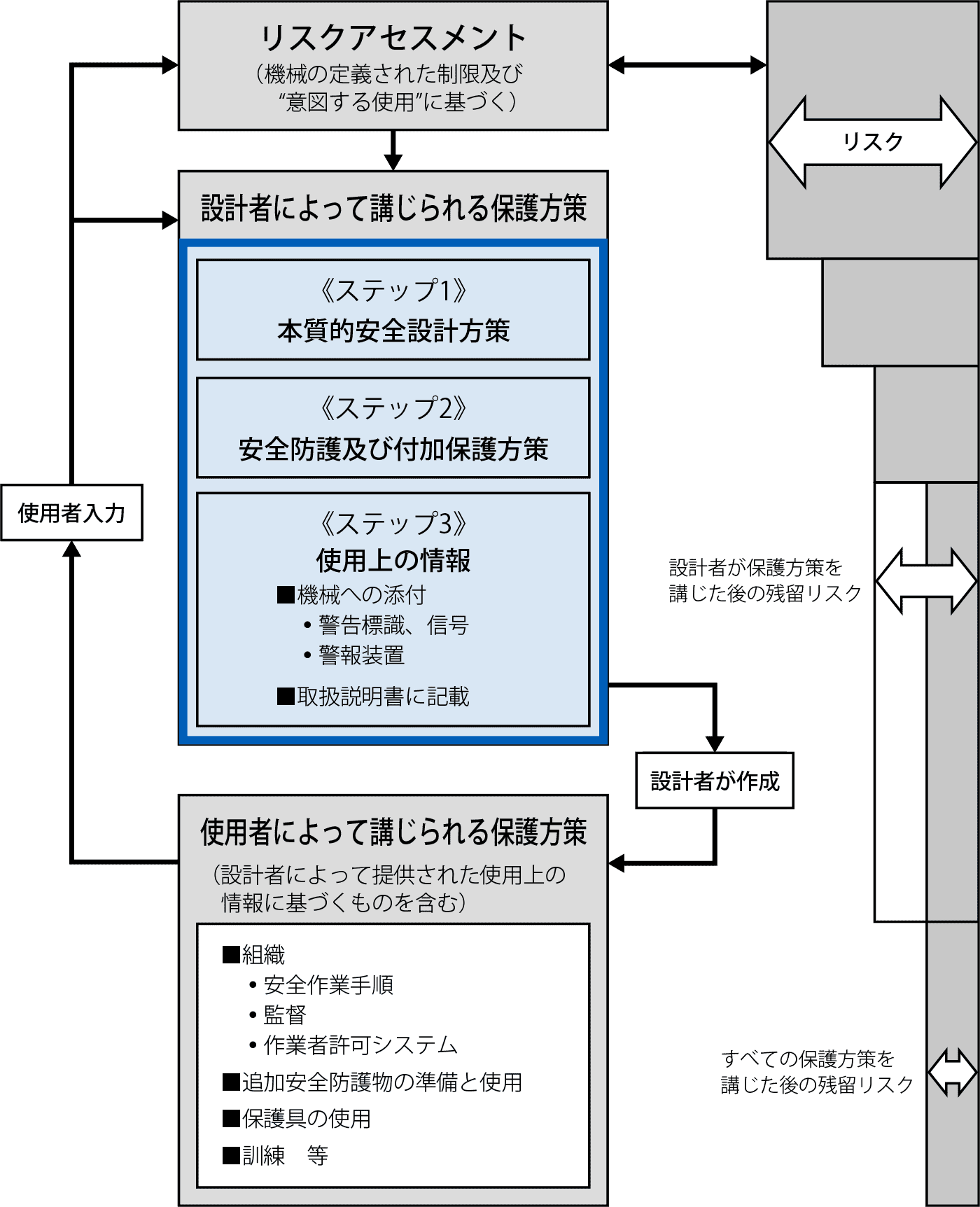
リスク低減の手順
リスクの低減は、「ステップ1.本質的安全設計方策」「ステップ2.安全防護及び付加保護方策」「ステップ3.使用上の情報」の3つの段階で順番に検討します。このリスク低減方策の実施のための方法は、「3ステップメソッド」と呼ばれています。
e-ラーニング
時間・場所を問わず自分のペースで繰り返し学習可能
セーフティライトカーテンF3SG-SRシリーズ
NXシリーズ 通信コントロールユニット/セーフティコントロールユニットNX-CSG / SL5 / SI / SO
非常停止用押ボタンスイッチ(φ22/φ25)A22NE-PD / A22NE-P / A22E
セーフティレーザスキャナOS32C