ビジョンシステムとパラレルロボットが連携、
高速で箱詰め
商品名:Quattroシリーズ&SmartVisionMX*
包装・パッケージ 検査・確認 省力化・自働化 タクトタイム短縮 効率化(業務・作業)
180cpmでの高速ピッキングでさらなる生産性の向上に貢献します
- 1.流れてくるワークを画像センサが認識
- 2.ワークの位置をロボットに伝達
- 3.ロボットは正確にピックして箱詰め
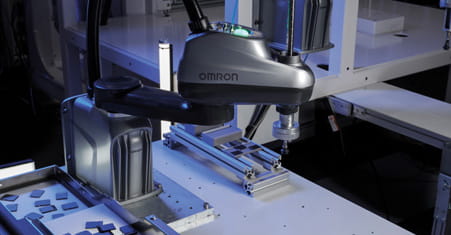
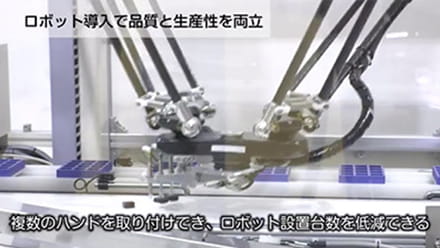
「Quattroシリーズ」は、4本のアームを持ち、180cpm(1分あたりの仕事量)に対応する高速でのピック&プレースが可能な産業用ロボット(パラレルロボット)です。またロボットアプリケーションに最適化された高信頼画像センサシステム「SmartVisionMX*」と連携し、カメラが認識したワークの位置を把握することができます。
動画では、コンベア上を流れてくるワークをSmartVisionMXがスキャンし、それぞれの位置をロボットに伝えます。ロボットはその情報をもとに、ワークのひとつひとつを正確にピックアップ、スピーディに箱詰めします。ワークの位置は正確に把握されるため、等間隔でなくても、向きがずれていても、問題なくピック&プレースが可能です。
こうした動作設定はソフトウェアACE(Automation Control Environment)上で開発が可能。ウィザード形式により短時間でロボットとカメラ、コンベアの設定を行い、実稼働に入れます。
*「SmartVisionMX」は20年10月に受注終了しました。代替商品はIPC Apprication Controller(形AC152000)になります。
新着動画産業用ロボットの動画をすべて見る



産業用ロボットの
資料ダウンロードダウンロード資料をすべて見る