ロボット統合システム
制御を生業とするオムロンだからこそできる
ユニークなロボットアプリケーション
業界初*、ロボットと制御機器の制御を一体化する「ロボット統合コントローラ」
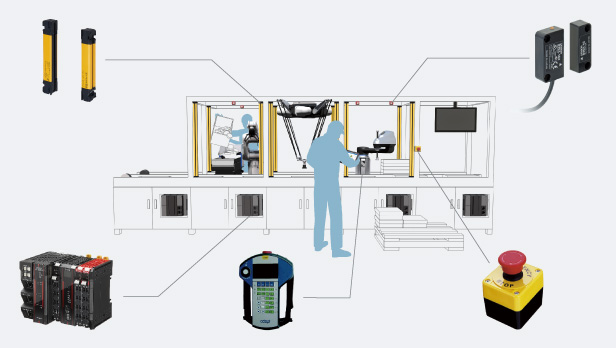
ロボットと周辺機器をシームレスに統合し、人でしかできなかった複雑な作業を高度に自動化する「制御の統合」と、リアルとバーチャルでの正確なシミュレーション技術によって、システム構築からメンテナンスまでを効率化する「構築プロセスの統合」、この2つの統合で、ロボットを組み込んだ革新的なアプリケーションを提供します。オムロンはモノづくりに必要な「各種制御機器群」と、これまで培った豊富なアプリケーションナレッジと技術で、動作を止めない検査・アライメントのアプリケーションや、匠の技を高度に自動化したアプリケーションを実現します。
* 2019年11月当社調べ






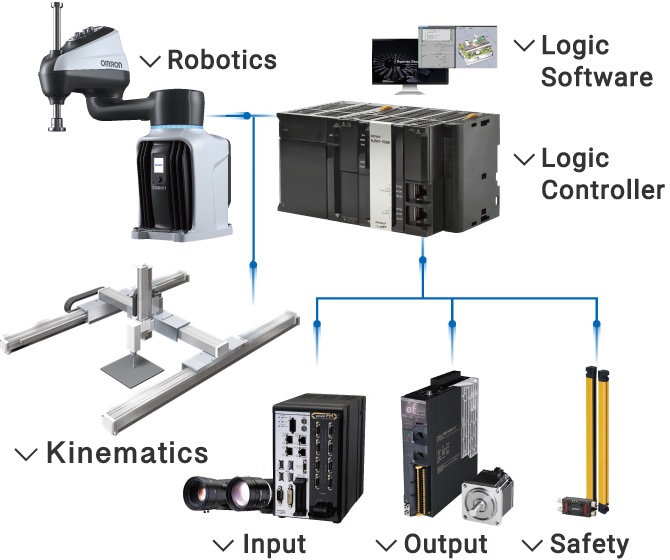





Logic Controller
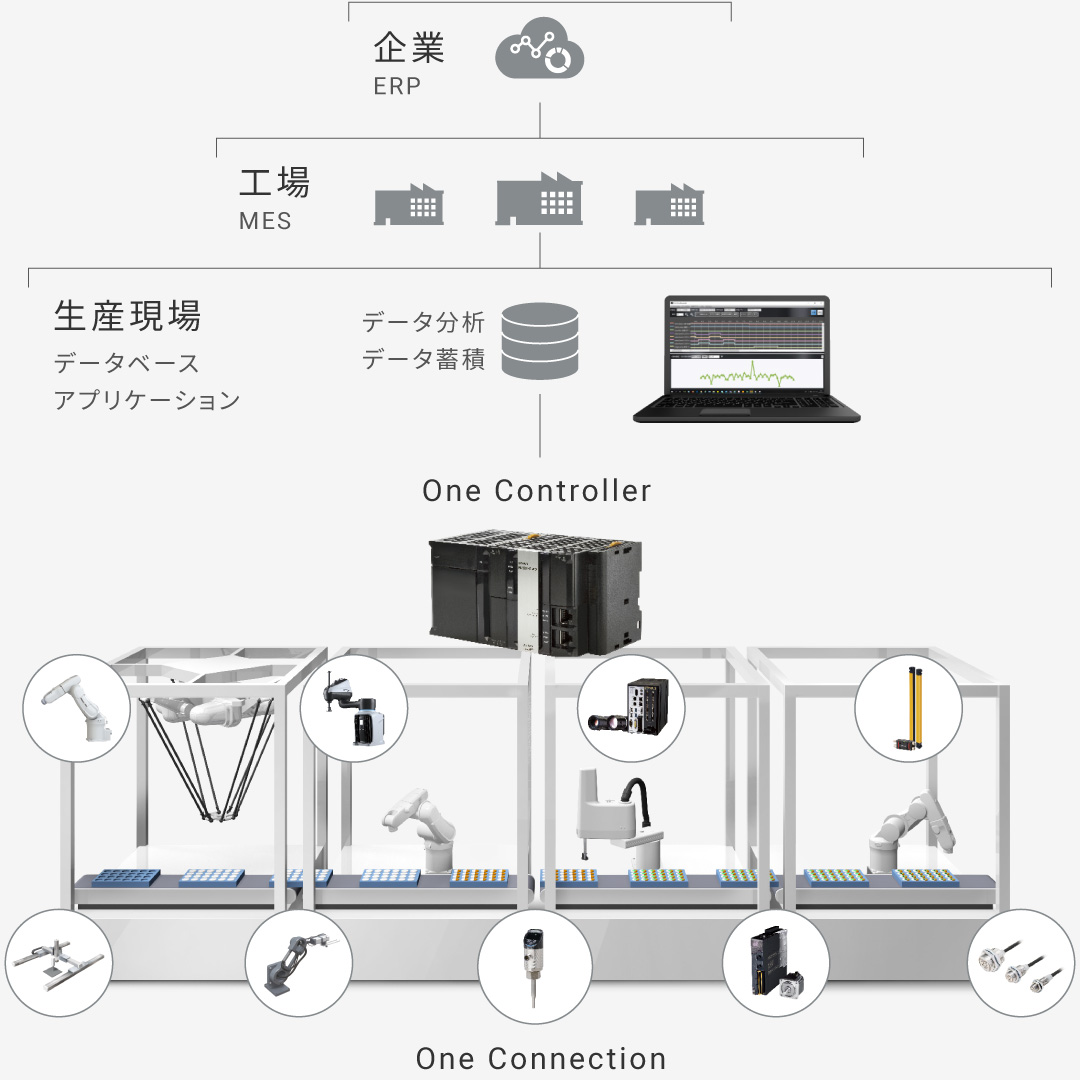
シーケンス・モーション・ロボット制御を
Oneコントローラでシームレスかつスムーズに統合
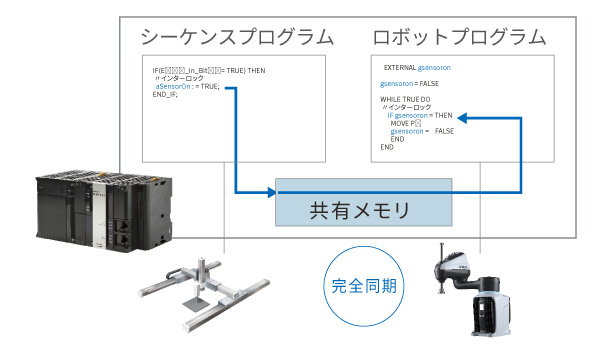
シーケンス・モーションに加え、ロボット制御もOneコントローラに統合することで、ロボットを含んだ各機器の同期制御や、各機器の時間軸が合致した“使える”情報の収集を可能にします。

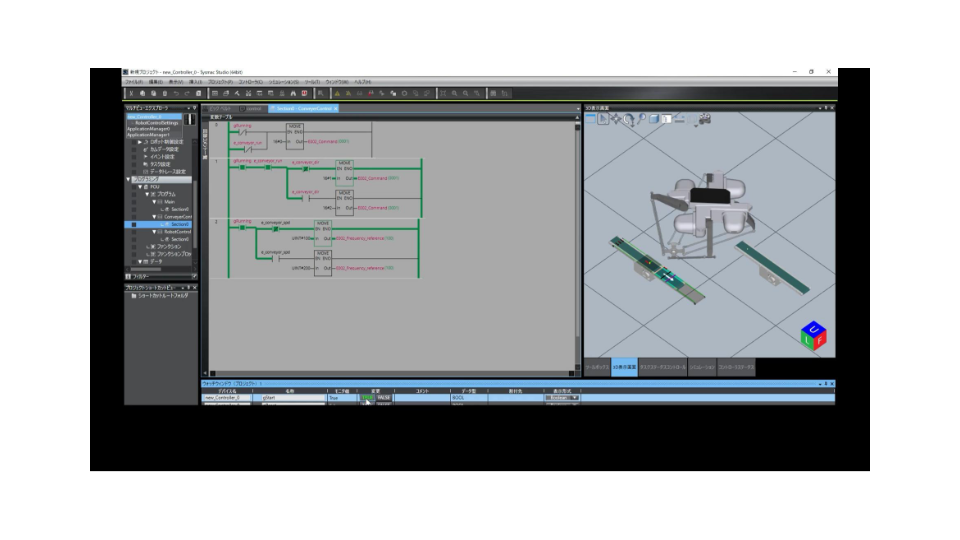
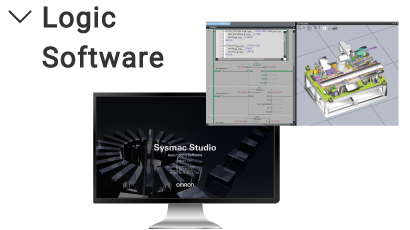
Logic Software
Oneソフトウェアでロボットとマシン制御を統合した
プログラミング・3Dシミュレーションを実行し
エンジニアリングチェーンを革新
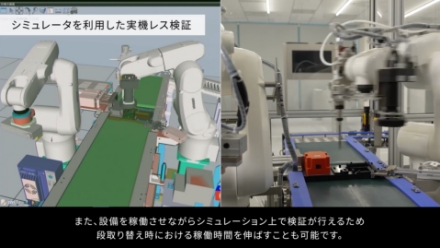
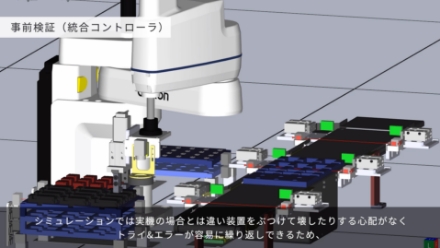
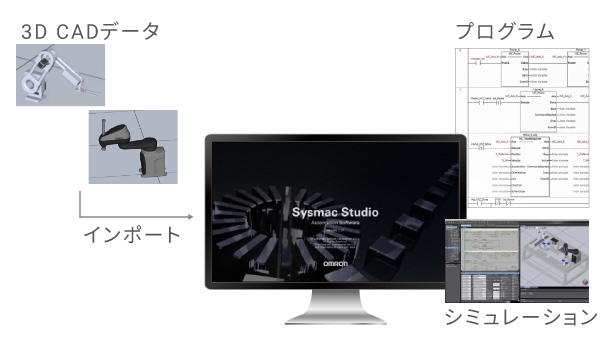
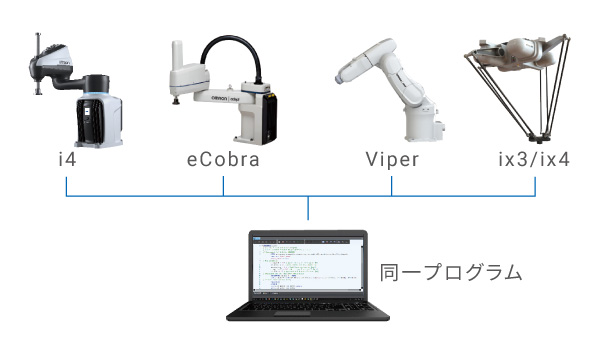
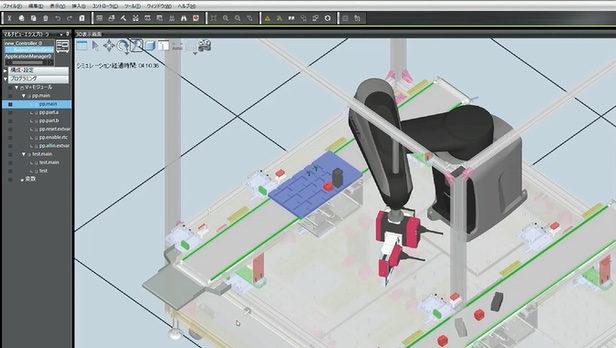
今まで異なっていたロボットとマシン制御のプログラミング言語を統一し、1つのソフトウェア統合開発環境上で簡単にシミュレーションする技術を確立しました。これにより、バーチャル環境下とリアル環境の生産設備を接続することで、リモートでの設備立上げ、メンテンナンスが可能となります。

Robotics
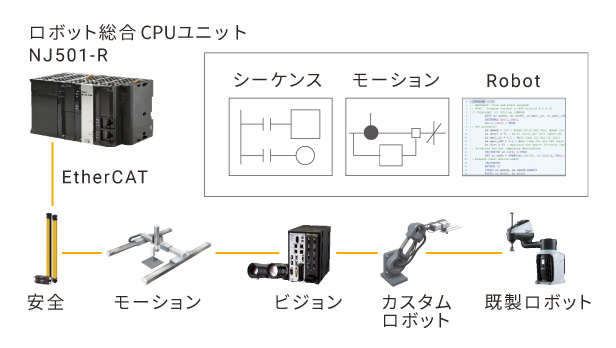
PLCからドライブ機器をプログラムするのと
同じスタイルで簡単にプログラミング・制御できるロボット
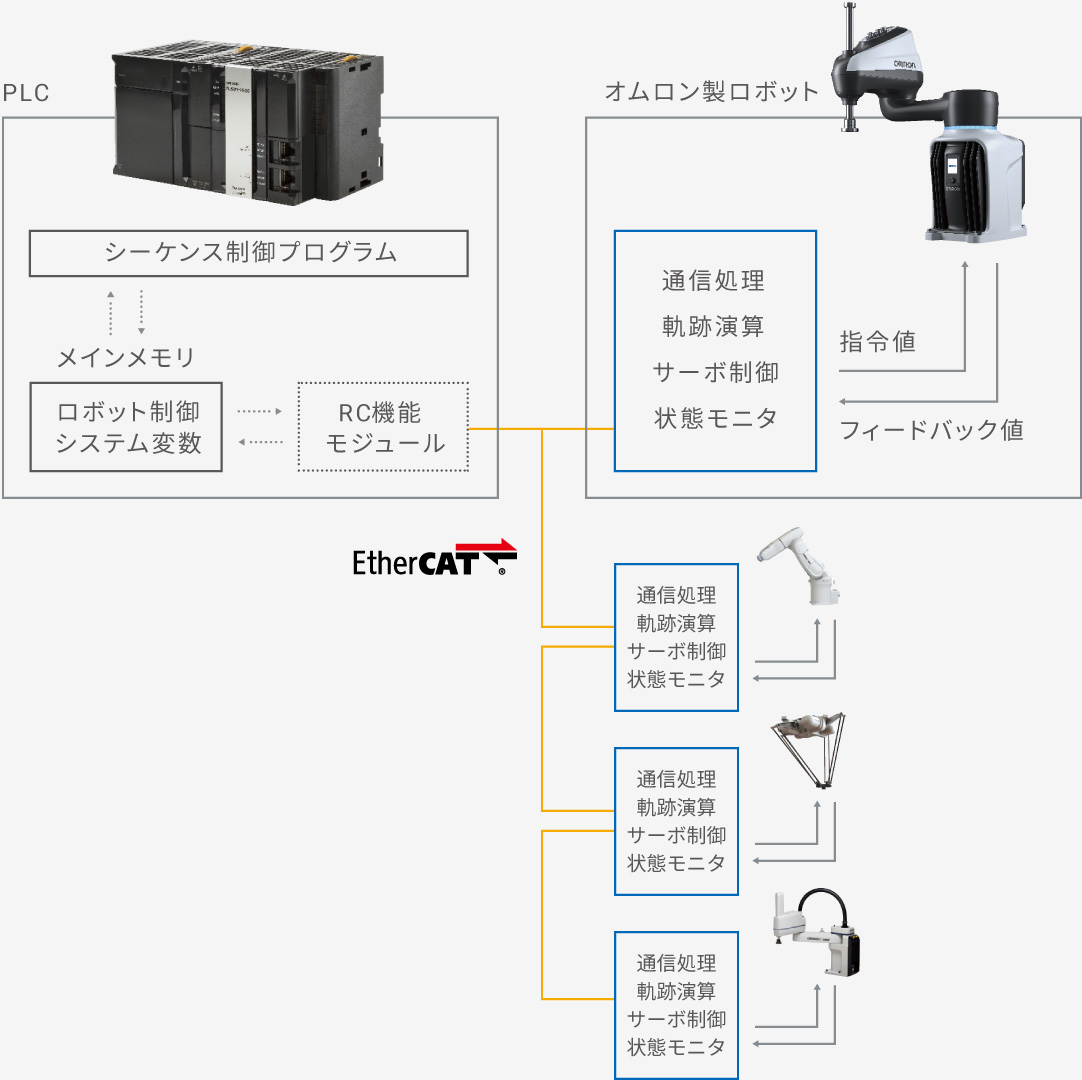
PLCにロボット制御を統合し、ロボット自体の高速性、高精度性を維持したまま、
その他機器と同様にPLCからEtherCATでロボットを制御できることで
PLCエンジニアでもロボットの制御を可能にします。
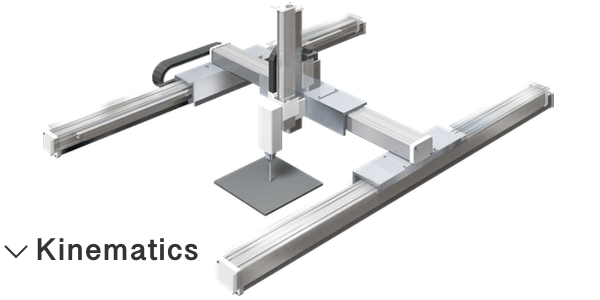
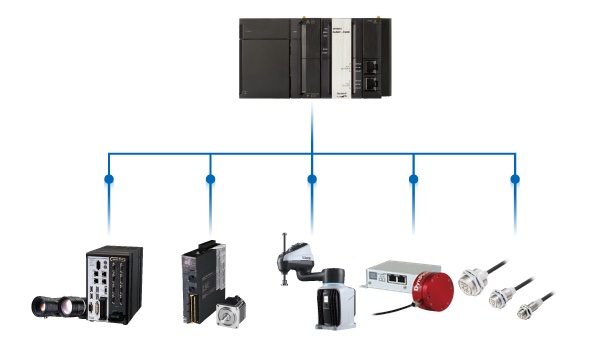
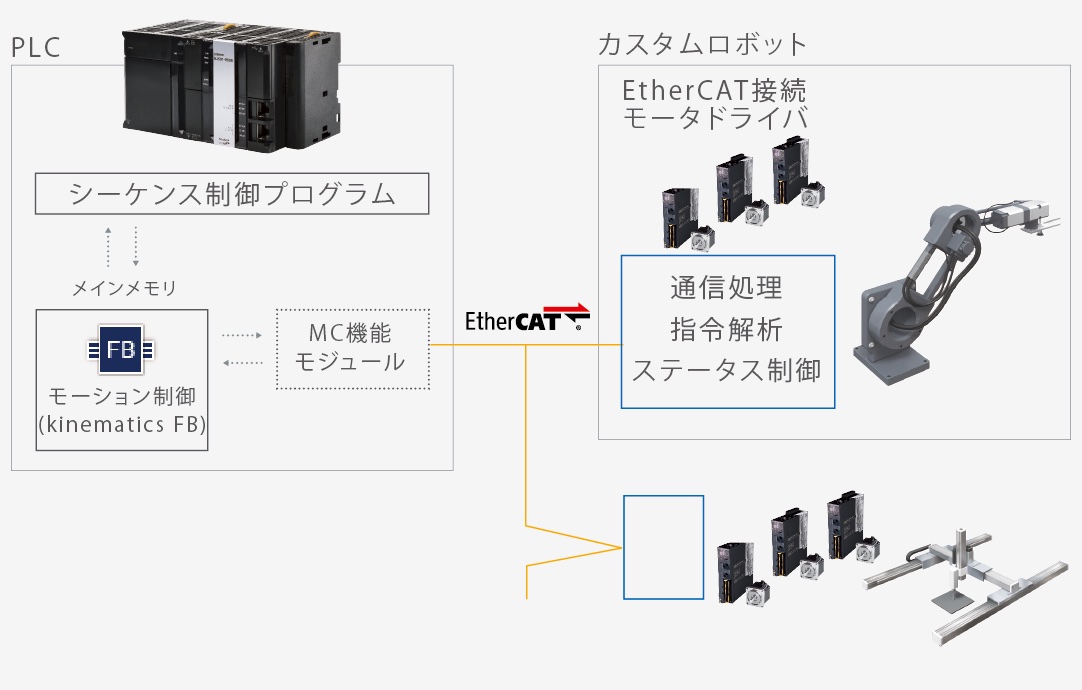
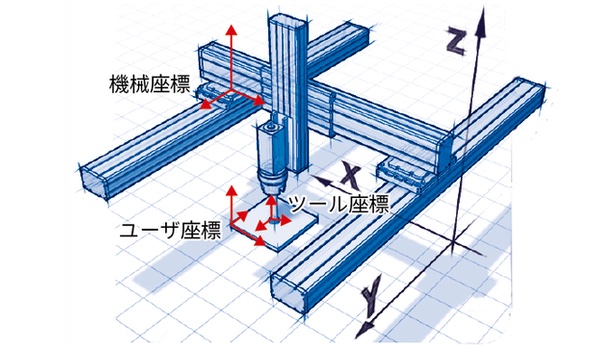
Kinematics
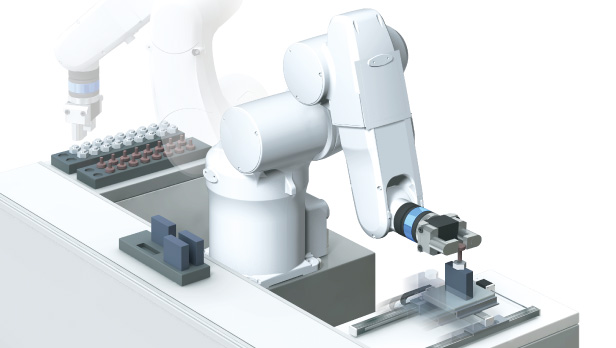
マシンサイズにジャストフィットなカスタム(自作)ロボットもOneコントローラで制御し、ユニークなフレキシブルマシンを実現
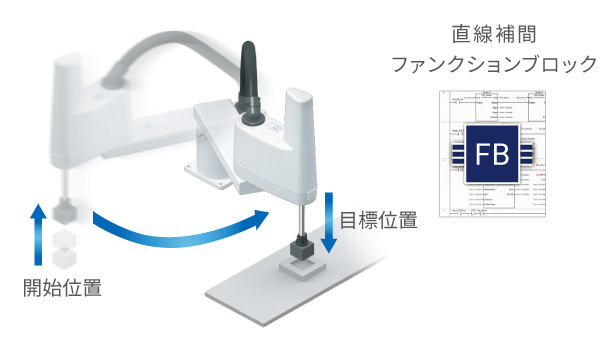
IEC 61131-3形式のファンクションブロックを使用して、装置内のモーションとカスタム(自作)ロボットをOneコントローラで高速同期制御ができます。
Input
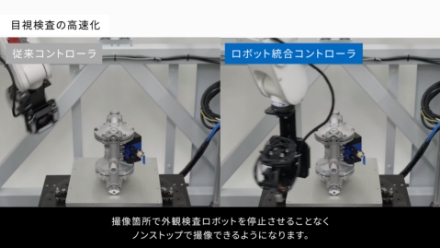
ノンストップ検査の実現による検査スループットの最大化
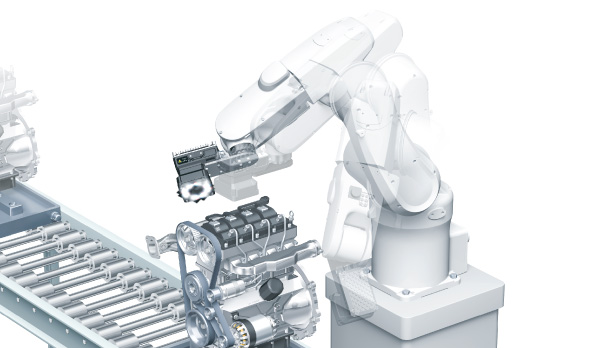
画像センサとロボットの制御が統合されることで、コンベアを止めない検査、
ロボットに画像センサを搭載した止めない多点検査を実現し、検査スループットを最大化します。



Output
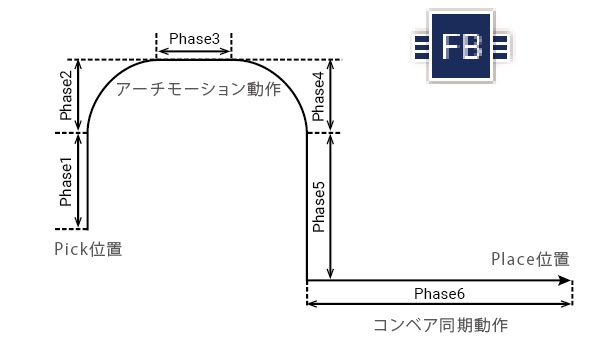
ロボットとモーション制御の高速同期実現による
組立・加工のスループット最大化
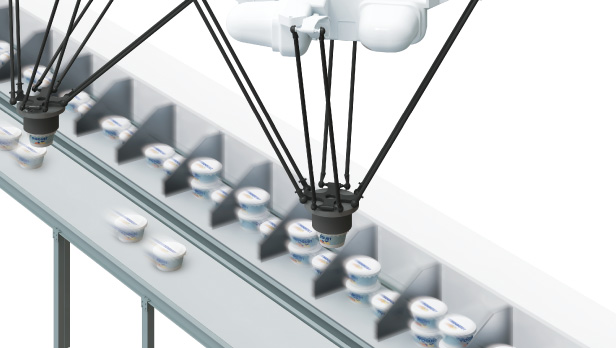
ロボット制御とモーション制御を統合し、高速かつ高度に同期、連携させることで、
器用で無駄のないスムーズな動作を生み出し、組立・加工スループットを最大化します。

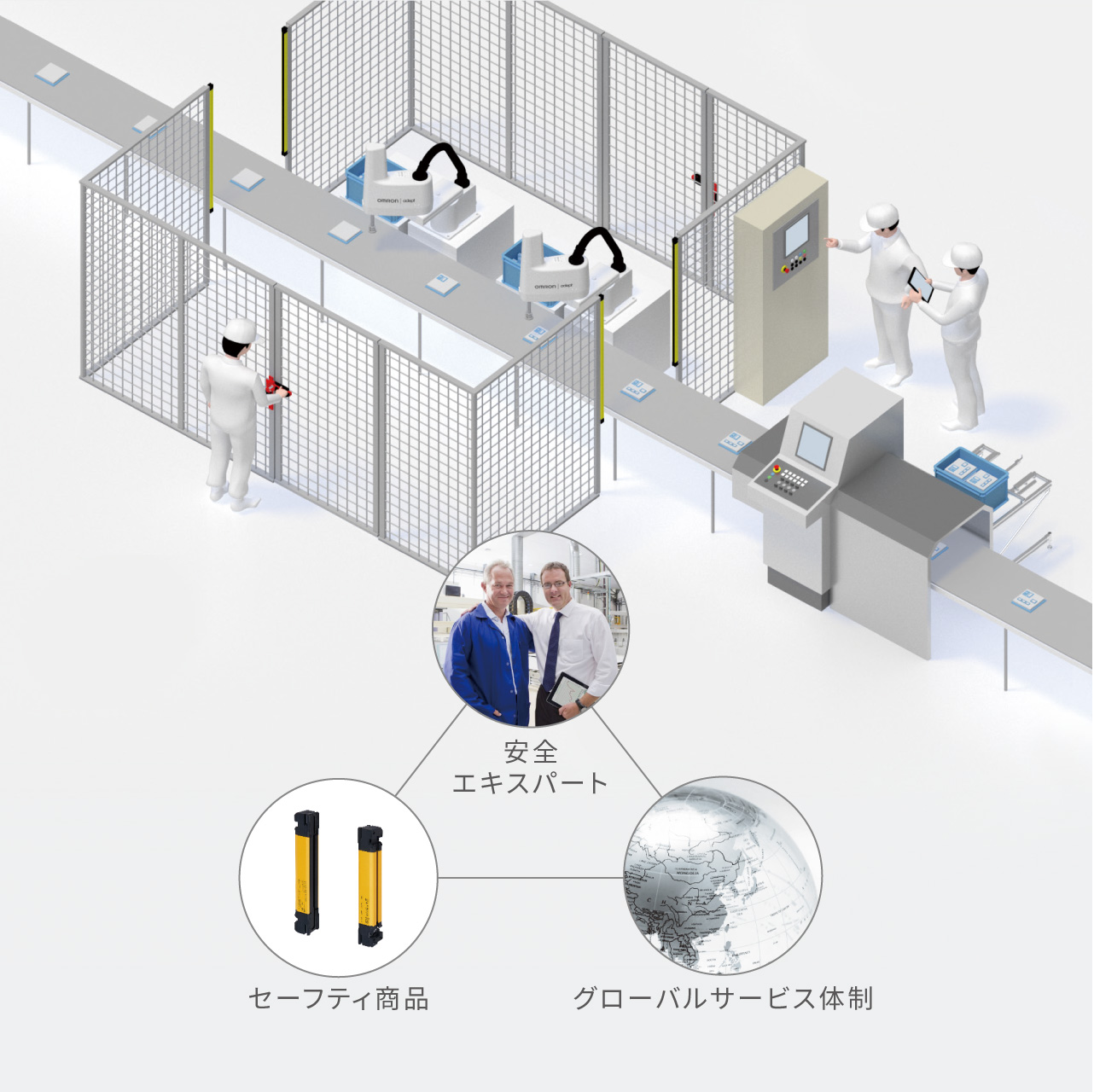
Safety
ロボットシステムの生産性と安全性を両立
ロボットシステムを安心して稼働させるためには、生産性と安全性の両立が必要不可欠です。
オムロンでは商品とサービスサポートの両面で、お客様の生産性と安全性をサポートします。

注.セーフティアセッサ資格は(一社)日本電気制御機器工業会(NECA)が、ロボットセーフティアセッサ資格は(一社)セーフティグローバル推進機構(IGSAP)がそれぞれ制度化し、日本認証株式会社(JC)が運営する資格制度

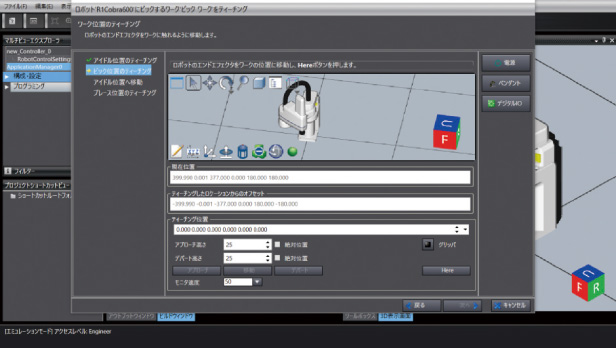
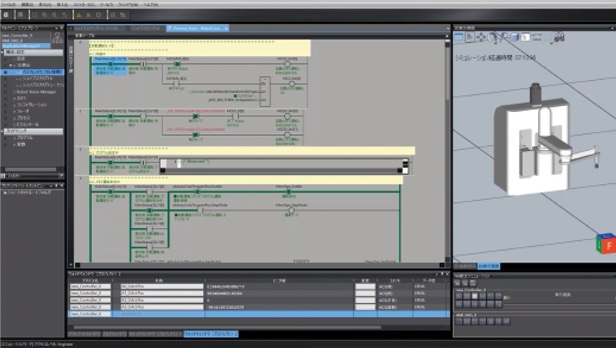
3Dシミュレーションで
開発期間短縮・設計品質向上
オートメーションソフトウェア Sysmac Studio
VIEW MORE

動画でみる ロボット統合システム
スタートアップガイド
VIEW MORE