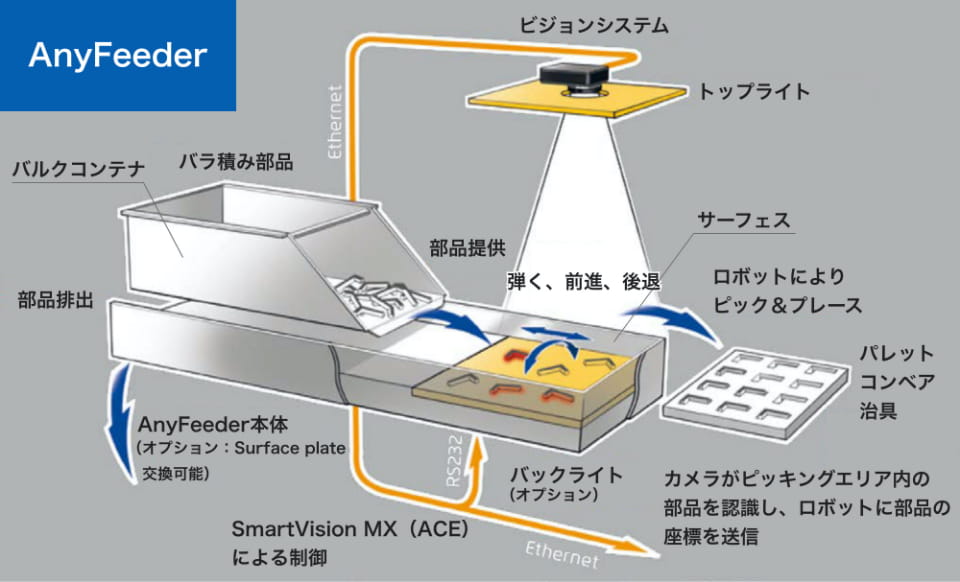
AnyFeederの動作*
①バルクコンテナより部品供給
②「弾く」「前進」「後退」動作により部品をばらす
③ビジョンシステムで部品の位置、向き、表裏、重なりを確認
④ロボットがピック&プレース
⑤サーフェス上にあるピッキングエリアに部品がない・重なっている・裏になっている場合に、ビジョンシステムから、シリアル通信によってAnyFeederに動作指示が送られ部品供給や「弾く」「前進」「後退」動作を行う。
*AnyFeederは油・水・粉体などのある工程では使用できません
2025/03 受注終了 推奨代替商品(フレキシブルパーツフィーダ iPFシリーズ)