
力覚センサ 14161シリーズ
全3軸方向の力量とモーメントの測定が可能で
高度アプリケーションに最適
力覚を必要とする高度アプリケーション向けにロボット能力を拡張します。
外形寸法(単位: mm)
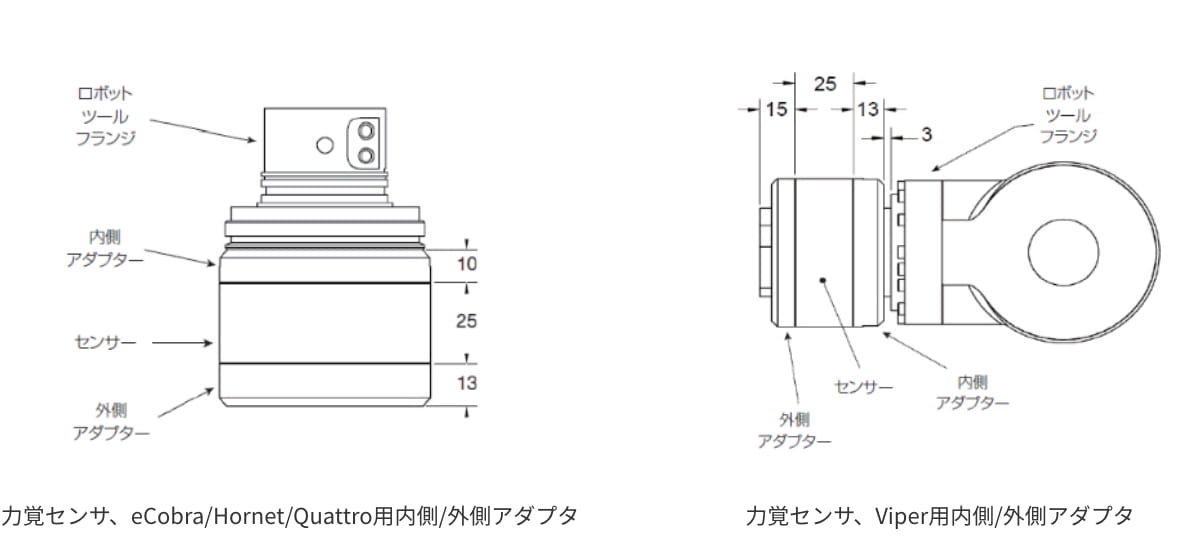
外部アダプタにはロボットツールフランジと同じ取り付け穴が開いています。
仕様
| 項目 | 仕様 | |
|---|---|---|
| JR3 社形式 | 67M25A3 | |
| オムロン形式 | オプション表をご覧ください | |
| 外径 | 67 mm | |
| 厚さ | 25 mm | |
| 材質 | アルミニウム合金 2024 | |
| 質量 | 175 g | |
| 精度(全軸) | ±1.0% | |
| 使用温度 | -40~65°C | |
| 保護構造 | IP40 | |
| Fx、Fy | 定格荷重 | ±200 N |
| 分解能 | 0.050 N | |
| 単軸過負荷 | 930 N | |
| Fz | 定格荷重 | ±400 N |
| 分解能 | 0.100 N | |
| 単軸過負荷 | 3870 N | |
| Mx、My | 定格荷重 | ±12 Nm |
| 分解能 | 0.0032 Nm | |
| 単軸過負荷 | 58 Nm | |
| Mz | 定格荷重 | ±12 Nm |
| 分解能 | 0.0032 Nm | |
| 単軸過負荷 | 48 Nm | |
| 電源 | 9-12 V DC | |
| サンプリング周波数 | 8,000 Hz | |
| センサ出力ポート | RJ-11 | |
| CADファイル | Force Sensor | |
オプション品
| タイプ | 力覚センサ付き設置接続キット | 設置接続キット(力覚センサなし) |
|---|---|---|
| eCobra600/800/800 Inverted | 14161-100 | 14161-105 |
| Viper 650/850 | 14161-200 | 14161-205 |
| Hornet 565、Quattro 650/800 | 14161-300 | 14161-305 |
| 概要 | 力覚センサ、アダプタ、接続ケーブル | アダプタ、接続ケーブル。センサは含まれません |
| 用途 | JR3 67M25A3力覚センサをお持ちでないお客様が使用するためのセット形式 | JR3 67M25A3力覚センサをすでにお持ちのお客様が使用するためのセット形式 |
| 共通ケーブル/付属品 |
|
|
| Cobra、Hornet、Quattro専用ケーブル |
|
|
| Viper 専用ケーブル |
|
|