コスメック社 ロボットハンドチェンジャー
SXR、SWR
高精度なロボットハンドチェンジャーでロボットの多機能化を実現
ハンドチェンジャーは、ロボット先端のツール交換時間を短縮し、ロボットの活用幅拡大と生産性向上を実現します。
特長
用途や仕様に合わせてマニュアル/オートタイプを選定可能
マニュアルハンドチェンジャー 形式:SXR
- ワンタッチ交換で簡単
協働ロボットに最適な手動式ロボットハンドチェンジャーです。 - 位置再現精度:0.05mm
※製品の詳細はコスメックス社サイトをご参照ください。
http://www.kosmek.co.jp/php_file/product_page.php?no=310_01_01&ref=005オートハンドチェンジャー 形式:SWR
- 高精度
位置再現精度:3μm
可動式テーパスリーブによる二面拘束で高精度位置決めを実現しました。
ツール先端のブレ量が少なく、正確な作業を実現します。 - ガタツキゼロで芯ブレやビビりを防止
可動式テーパスリーブによる二面拘束でスキマがなくガタツキがありません。
作業負荷による芯ブレやビビりを防止し、作業品質を向上します。 - リフト機能(払出し機能)
連結時はリフト機能で位置決め機構部(着座面とテーパ面)の傷付きを防止します。
分割時はピストンロッドによりツール側を突き放し、固着やカジリによるチョコ停を防止します。 - ツールの落下を防止するセルフロック機能
停電等でエア圧力がゼロになってもバネによるセルフロック機能でツール落下等を防止し、安全です。
※通常時はバネ力 + エア圧力で連結を行ってください。
※製品詳細はコスメックス社サイトをご参照ください。
性能一覧
マニュアルハンドチェンジャー 形式:SXR
| 協調ロボットモデル名 | TM5 | ||
|---|---|---|---|
| ロボット形式 | RT6-000700□ RT6-010700□ RT6-010701□ |
RT6-000900□ RT6-010900□ RT6-010901□ |
|
| ロボット最大可搬質量 | 6kg | 4kg | |
| ハンドチェンジャー形式 | マスターシリンダ | SXR0030-M | |
| 変換プレート | SXRZ0030-MF4 | ||
| ツールアダプタ | SXR0030-TF4 | ||
| ハンドチェンジャー仕様 | 可搬質量 | 3–5kg | |
| 位置再現精度 | 0.05mm | ||
| 許容静的モーメント:曲げ方向 | 6.0N・m | ||
| 許容静的モーメント:ねじり方向 | 8.0N・m | ||
| 使用温度 | 0–70℃ | ||
| プッシャー押力(リリース必要力) | 約20N | ||
| 質量:マスターシリンダ | 約75g | ||
| 質量:変換プレート | 約58g(変換プレートのみの質量を示します。) | ||
| 質量:ツールアダプタ | 約85g | ||

オートハンドチェンジャー 形式:SWR
| 協調ロボットモデル名 | TM5 | TM12 | TM14 | ||
|---|---|---|---|---|---|
| ロボット形式 | RT6-000700□ RT6-010700□ RT6-010701□ |
RT6-000900□ RT6-010900□ RT6-010901□ |
RT6-000700□ RT6-010700□ RT6-010701□ |
RT6-000900□ RT6-010900□ RT6-010901□ |
|
| ロボット最大可搬質量 | 6kg | 4kg | 13.8kg~14.5kg | 13.8kg~14.5kg | |
| ハンドチェンジャー形式 | マスターシリンダ | SWR0070-M□-□ | SWR0120-M□-□ | ||
| 変換プレート | SWRZ0070-MF4 | SWRZ0120-MF4 | |||
| ツールアダプタ | SWR0070-T-□ | SWR0120-T-□ | |||
| ハンドチェンジャー仕様 | 可搬質量(0.5MPa時) | 7kg | 12kg | ||
| 位置再現精度 | 0.003mm | ||||
| 駆動用エア圧力 | 0.35~1MPa | ||||
| 耐圧 | 1.5MPa | ||||
| 使用温度 | 0~70℃ | ||||
| 使用流体 | ドライエア | ||||
| 質量:マスターシリンダ | 180g | 250g | |||
| 質量:変換プレート | 140g | 145g | |||
| 質量:ツールアダプタ | 120g | 160g | |||
※質量は、外付オプションを除く本体のみの質量を示します。また、変換プレートは、ボルト及びピンを含む質量を示します。
※仕様は予告なく変更になる場合があります。
※製品の詳細はコスメックス社へお問合せください。

使用用途例
あらゆる作業を1台のロボットで完結します。
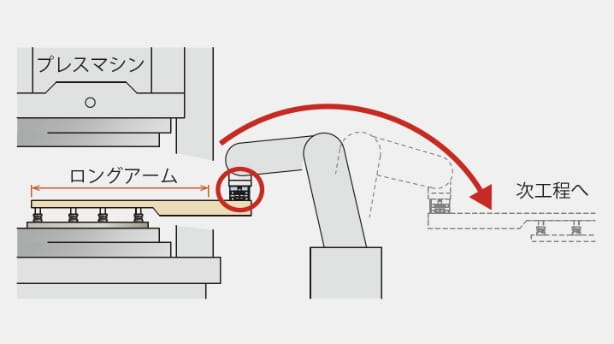
マシンテンディング
加工機への材料投入、完成品取り出し作業の自動化において、ワーク把持用ハンドの交換時に活用できます。
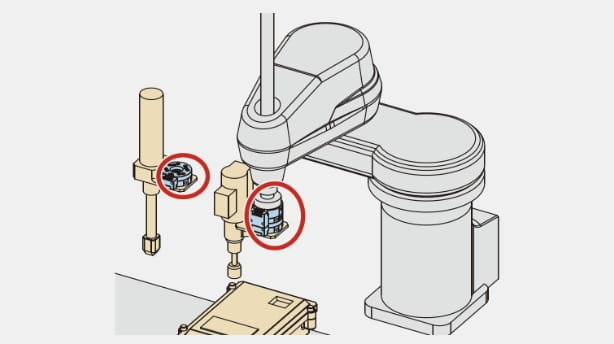
ねじ締め
ねじ締め作業の自動化において、電動ドライバ、ナットランナーの交換時に活用できます。
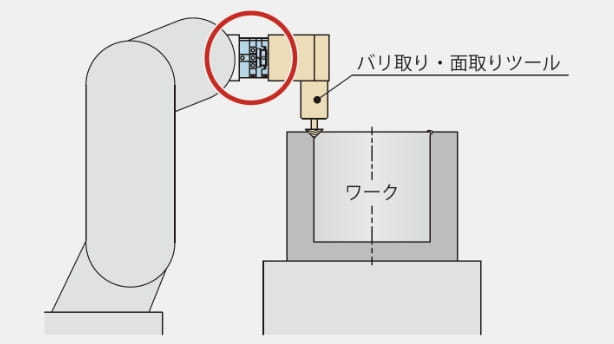
加工作業
バリ取りなどの加工作業自働化において、バリ取り用ツール、加工用ツールの交換時に活用できます。
システム構成:ロボット側
マニュアルハンドチェンジャー
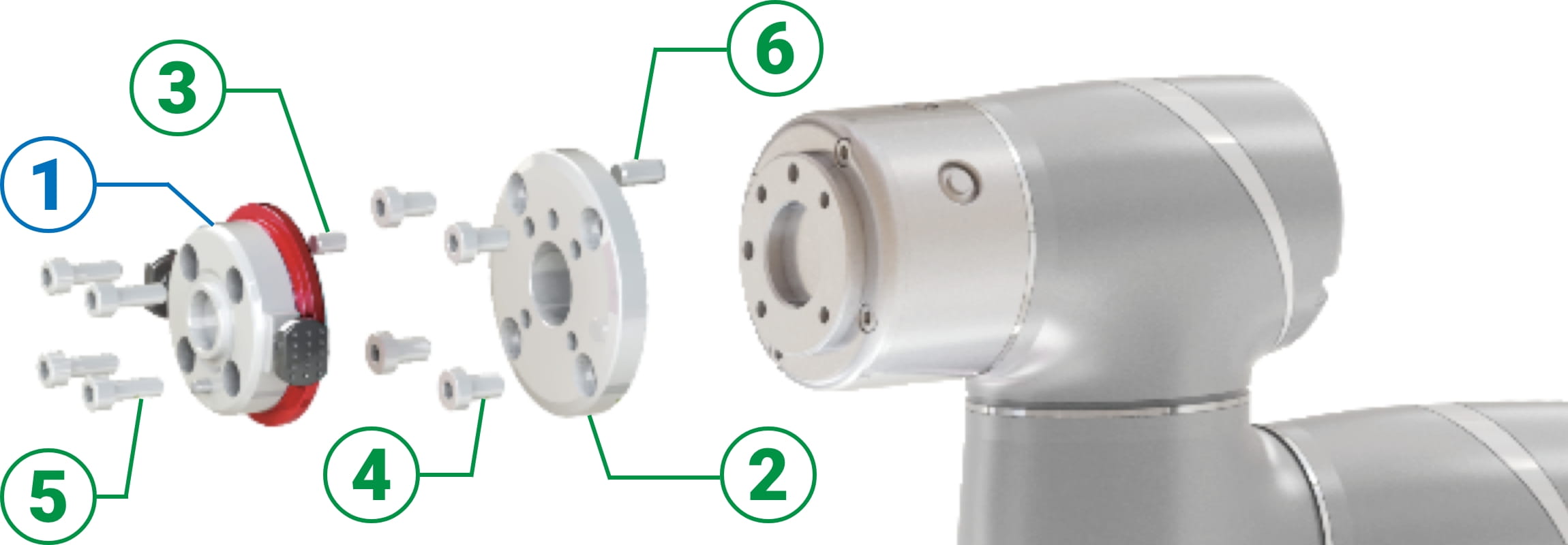
| 部品形式 | 番号 | 部品名称 | 数量 |
|---|---|---|---|
| SXR0030-M | ① | マスターシリンダ | 1 |
| SXRZ0030-MF4 (変換プレート) |
② | 変換プレート | 1 |
| ③ | 平行ピン Φ5×8 | 1 | |
| ④ | 低頭六角穴付ボルト(M6×10) | 4 | |
| ⑤ | 六角穴付ボルト(M5×14) | 4 | |
| ⑥ | 平行ピン Φ6×12 | 1 |
オートハンドチェンジャー
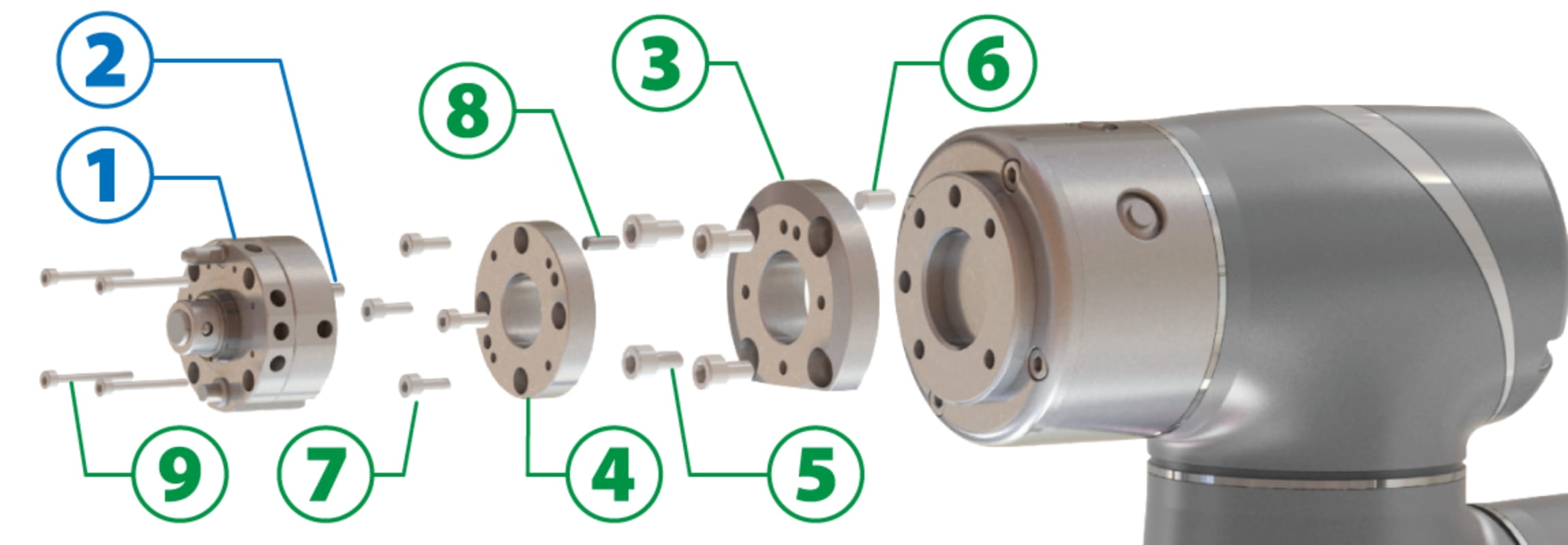
| 部品形式 | 符号 | 品名 | 数量 |
|---|---|---|---|
| SWR0070-M□(-□) | ① | マスターシリンダ | 1 |
| ② | 平行ピン Φ4x10 | 2 | |
| SWRZ0070-MF4 (変換プレート一式) |
③ | 変換ベース | 1 |
| ④ | アタッチメント | 1 | |
| ⑤ | 六角穴付ボルト M6×10 | 4 | |
| ⑥ | 平行ピン Φ6x10 | 1 | |
| ⑦ | 六角穴付ボルト M4×0.7×10 | 4 | |
| ⑧ | 平行ピン Φ5x10 | 1 | |
| ⑨ | 六角穴付ボルト M3×0.5×25 | 4 |
| 部品形式 | 符号 | 品名 | 数量 |
|---|---|---|---|
| SWR0120-M□(-□) | ① | マスターシリンダ | 1 |
| ② | 平行ピン Φ4x10 | 2 | |
| SWRZ0120-MF4 (変換プレート一式) |
③ | 変換ベース | 1 |
| ④ | アタッチメント | 1 | |
| ⑤ | 六角穴付ボルト M6×10 | 4 | |
| ⑥ | 平行ピン Φ6x10 | 1 | |
| ⑦ | 六角穴付ボルト M4×0.7×10 | 4 | |
| ⑧ | 平行ピン Φ5x10 | 1 | |
| ⑨ | 六角穴付ボルト M4×0.7×25 | 4 |
形式

マニュアルハンドチェンジャー
形式:SXR

オートハンドチェンジャー
形式:SWR
