動画セミナ1
開梱と初期設定協調ロボット TMシリーズの開梱から初期設定を行う方法を説明します。
再生時間:7:05

動画セミナ1
開梱と初期設定
協調ロボット TMシリーズの開梱から初期設定を行う方法を説明します。

動画セミナ2
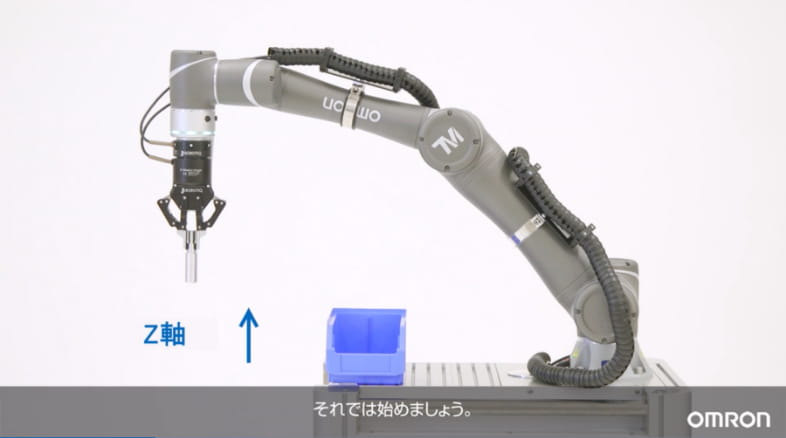
基本動作のプログラミング
この動画では協調ロボット TMシリーズを動かす基本を説明します
動画セミナ3
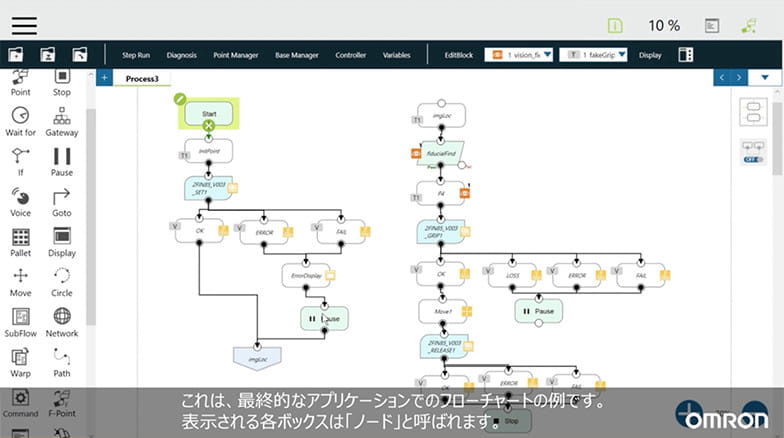
フローチャートを使ったプログラミング
この動画では、“TMflow”というソフトウエアを使用して協調ロボットをプログラミングする方法を説明します。

動画セミナ4
グリッパを取り付ける方法
この動画では、ロボットでグリッパを使用する方法を紹介します。
動画セミナ5
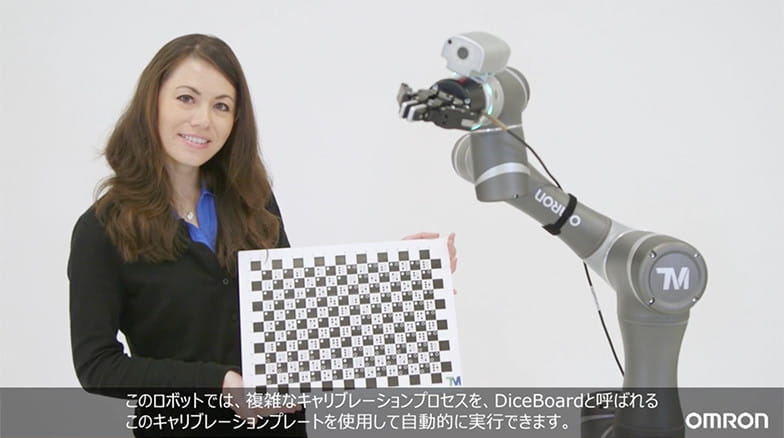
ビジョンキャリブレーションとビジョンノード
この動画では、ビルトインビジョンとビジョンシステムの使用方法を説明します。

動画セミナ6
ビジョンによるピック&プレース
この動画では、カメラとビジョンシステムを利用するアプリケーションでピック&プレース動作を説明します。
動画セミナ7
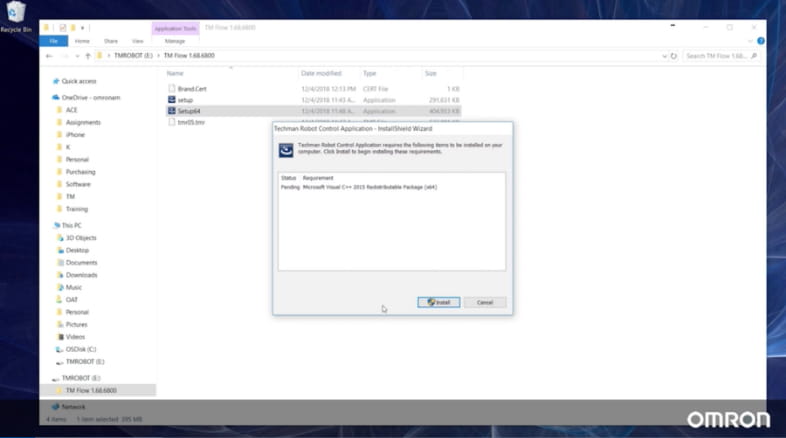
TMflowのアップデート方法
この動画では、コントロールボックスやクライアントPC上のTMflowソフトウェアのアップデート方法を説明します。
動画セミナ8
Modbusを介した通信
この動画では、TMflowでModbus TCP通信を使用する方法を説明します。
動画セミナ9
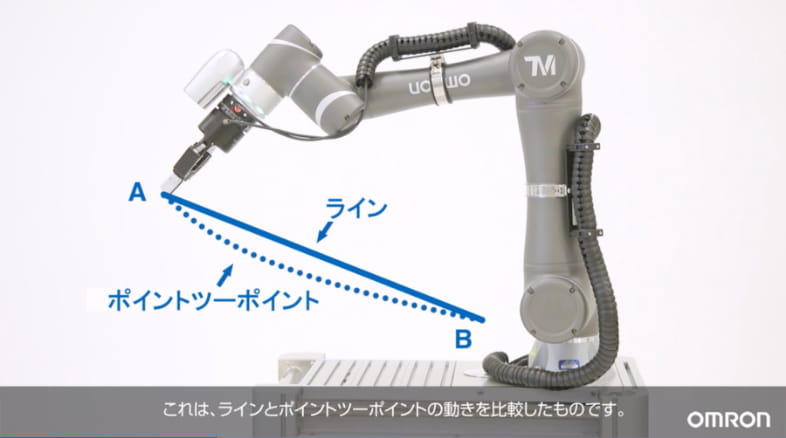
高度な動きの方式
この動画では、さまざまな種類の高度な動きを説明します。協調ロボットがこのような動きをすることで、お客様の用途を実現できます。
お客様へ:安全に関しては、必ずマニュアルおよびハードウエア設置マニュアルを参照してください。
