ビジュアル
フィードバック
アライメント
ライブラリ
マシンオートメーションコントローラ NJ/NX/NYシリーズと画像処理システム用
ビジュアルフィードバックアライメントライブラリ(形SYSMAC-XR018)のご紹介です。
ライブラリのご使用につきましては、当社営業担当者にお問い合わせください。
マシンオートメーションコントローラ NJ/NX/NYシリーズと画像処理システム用
ビジュアルフィードバックアライメントライブラリ(形SYSMAC-XR018)のご紹介です。
ライブラリのご使用につきましては、当社営業担当者にお問い合わせください。
ファンクションブロックを含む本ライブラリを使った位置決めなら、3つの課題を解決できます。
±1μm 精度のアライメント位置決めを1秒以下(平均値)で実行。
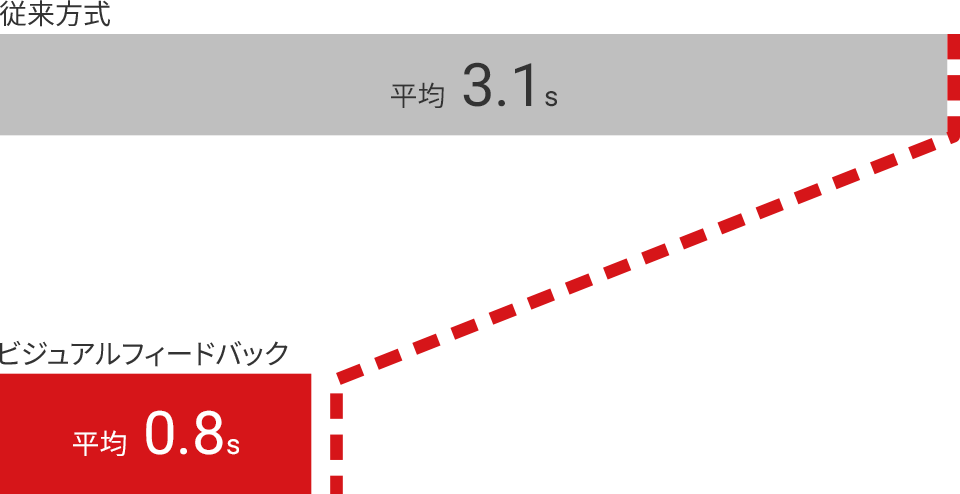
(当社指定条件での計測値)
たわみのようなワークのばらつきや機械誤差を吸収し、リトライによる速度低下と位置決め失敗を防止。
±5μm 精度の位置決め時間の分布
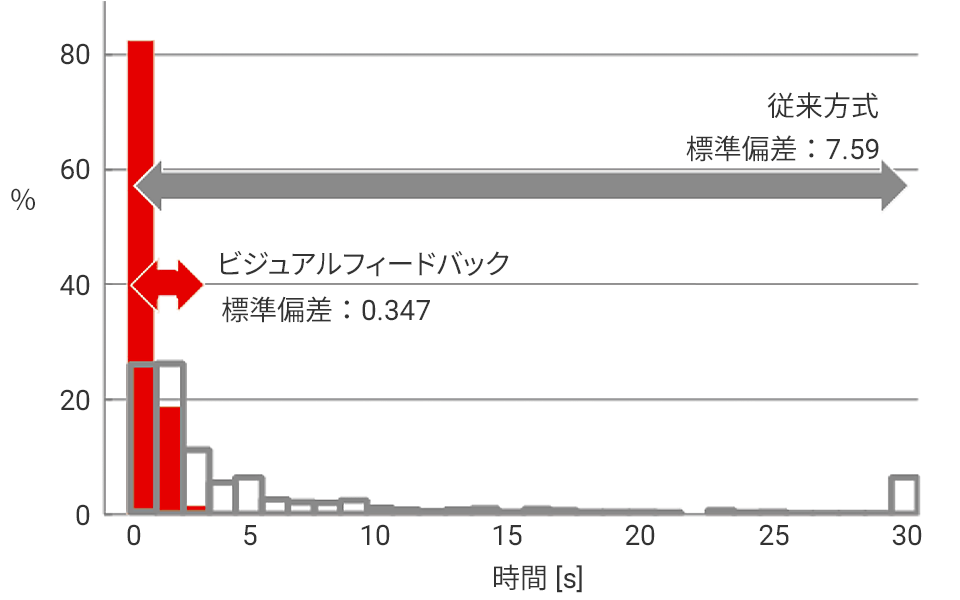
(当社指定条件での計測値)
画像センサのキャリブレーション作業は不要。
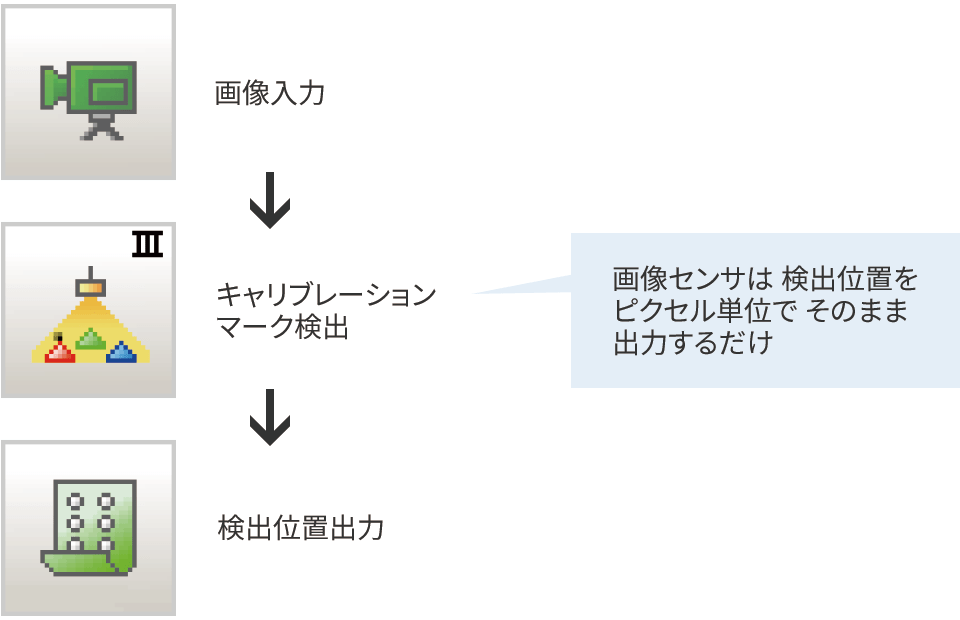
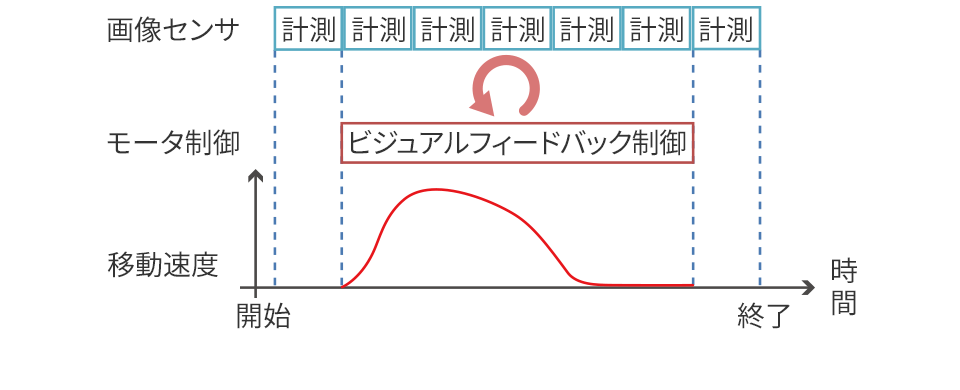
一般的に画像処理を用いた位置決めには、カメラで対象物の位置を計測し、その結果を用いてモータを駆動します。
これらの動作の個別実行が前提となっていたため、画像センサには位置計測のための高精度なキャリブレーション、モータには高精度な駆動が求められてきました。
ビジュアルフィードバックはモータの現在位置情報に画像センサの座標データを活用します。画像処理の計測周期ごとに現在位置をモータの動作制御にフィードバックするので、モータの位置とワーク位置のズレを吸収した位置決めができます。
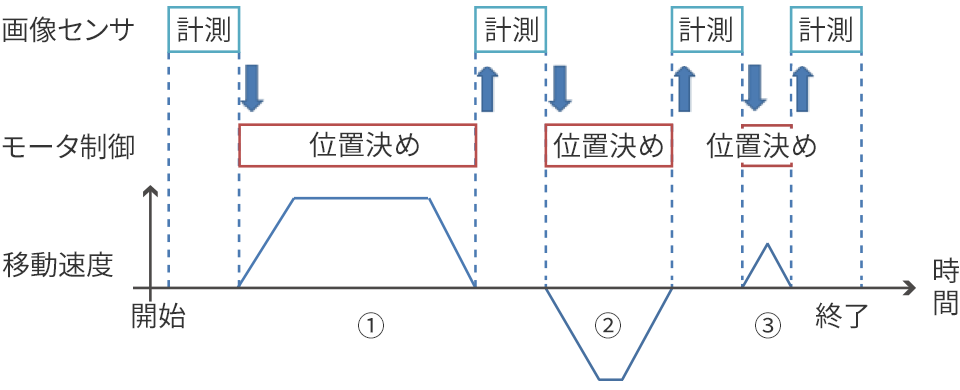

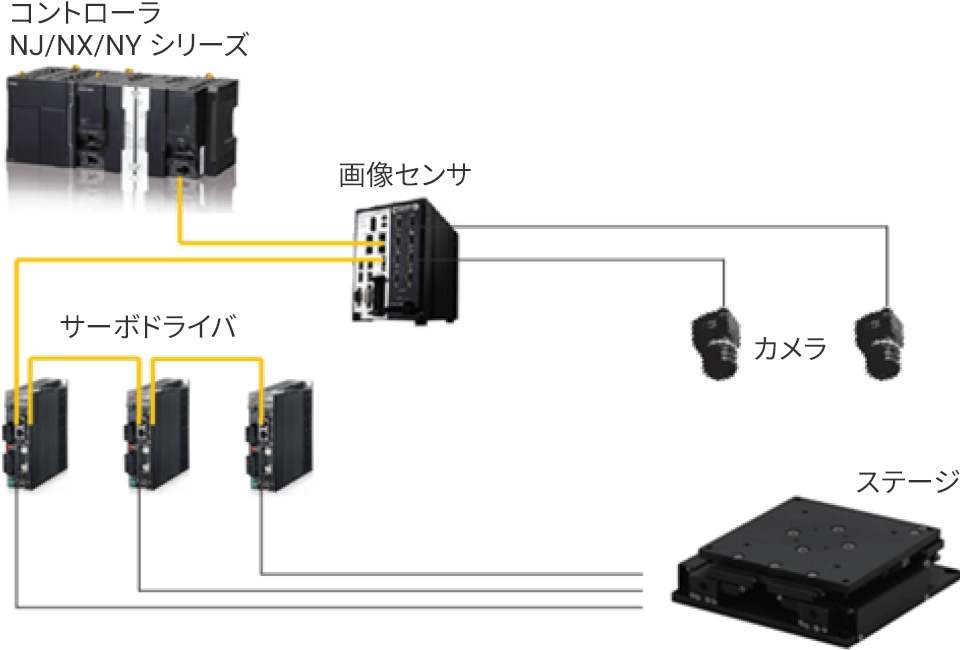
オムロン画像処理システム FHシリーズとマシンオートメーションコントローラによりステージ制御を行う例です。
尚、一部のライブラリは、ダウンロードできませんので、
当社営業担当者にお問い合わせください。