EtherCAT G5シリーズ
ライブラリ
マシンオートメーションコントローラ NJ/NXシリーズ、および産業用PC プラットフォーム NYシリーズ IPCマシンコントローラ用
EtherCAT G5シリーズライブラリ(形SYSMAC-XR004)のご紹介です。
マシンオートメーションコントローラ NJ/NXシリーズ、および産業用PC プラットフォーム NYシリーズ IPCマシンコントローラ用
EtherCAT G5シリーズライブラリ(形SYSMAC-XR004)のご紹介です。
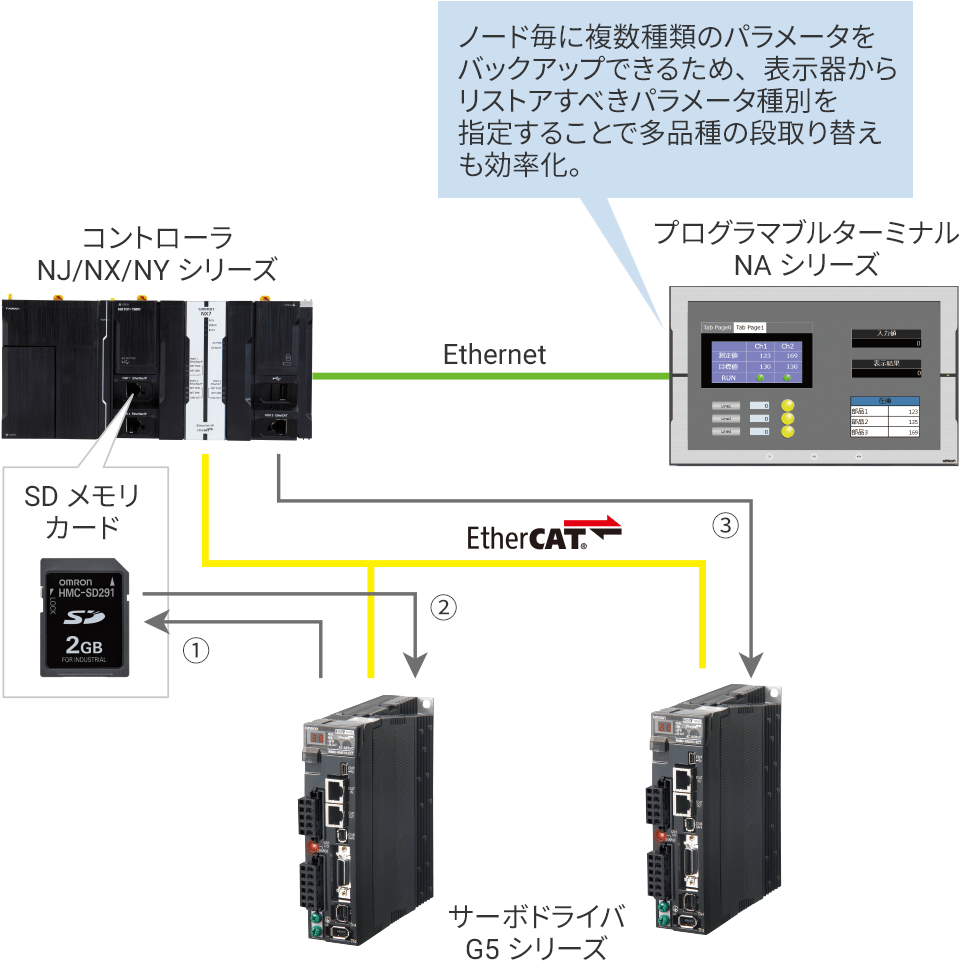
「パラメータバックアップ ファンクションブロック/リストア ファンクションブロック」により、パソコンを使用せずにサーボドライバのノード単位で*、パラメータのバックアップ(機器からの設定アップロード)/リストア(機器への設定ダウンロード)を実現できます。サーボドライバの設定変更や復旧が簡単に行えます。
「絶対値エンコーダ初期化ファンクションブロック」により、ノード単位での絶対値エンコーダの初期化も可能です。
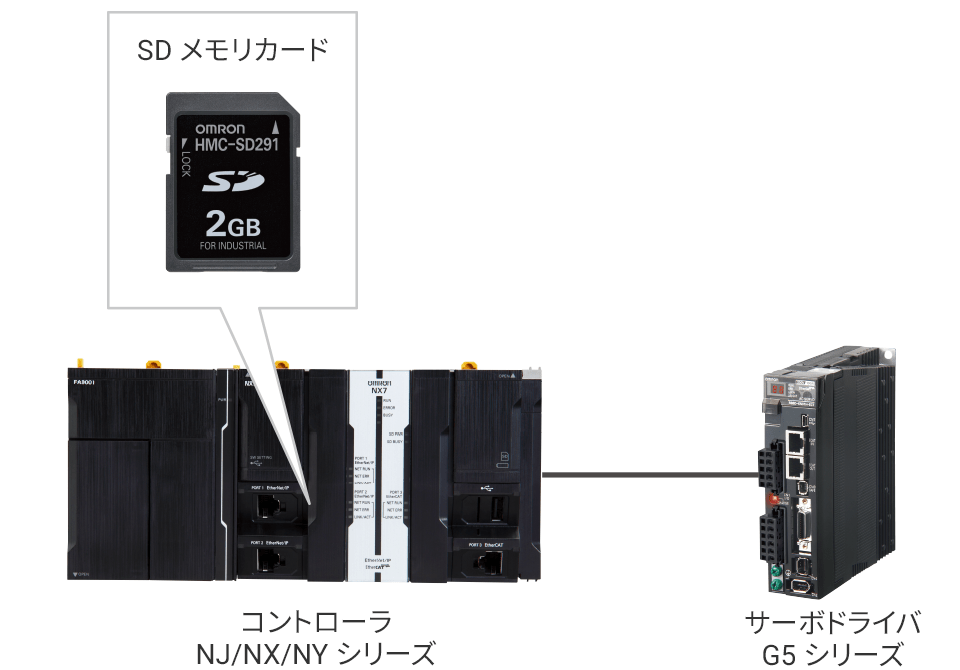
任意のノードのサーボドライバに対して、全パラメータを読み出してSDメモリカード内にバックアップファイルとして保存。
SDメモリカード内のバックアップファイルに保存されたパラメータを、任意のノードのサーボドライバにリストア。
任意のノードのサーボドライバに対して、絶対値エンコーダの初期化を実行。
* NJ/NXシリーズ CPUユニット・NYシリーズ IPC マシンコントローラのバックアップ/リストア機能により、全ノード一括でのパラメータのバックアップ/リストアが可能。さらに、本ライブラリを使用することで、ノード単位で可能となります。
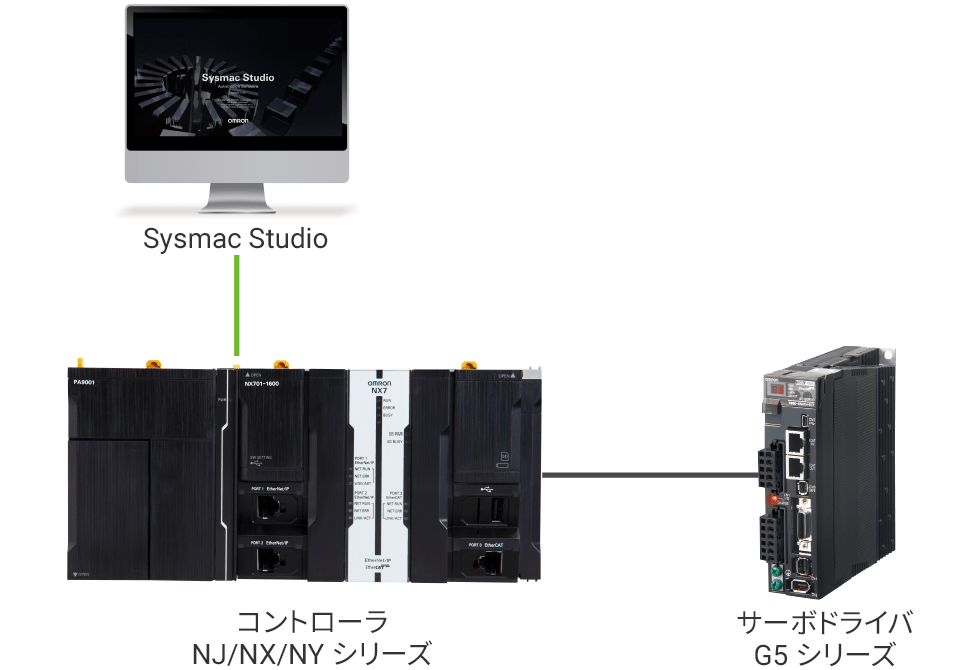
設定ツール(Sysmac StudioまたはCX-Drive)をオンライン接続・操作して、設定変更する必要あり。
NAシリーズなどの表示器の操作や、押しボタンの操作をトリガとして、SDメモリカードへのバックアップ/リストア、絶対値エンコーダの初期化がすべて実行可能。

尚、一部のライブラリは、ダウンロードできませんので、
当社営業担当者にお問い合わせください。