MC
(モーション制御)
ツールボックス
ライブラリ
マシンオートメーションコントローラ NJ/NXシリーズ、および産業用PC プラットフォーム NYシリーズ IPCマシンコントローラ用
MC(モーション制御)ツールボックスライブラリ(形SYSMAC-XR003)のご紹介です。
マシンオートメーションコントローラ NJ/NXシリーズ、および産業用PC プラットフォーム NYシリーズ IPCマシンコントローラ用
MC(モーション制御)ツールボックスライブラリ(形SYSMAC-XR003)のご紹介です。
NJ/NX/NYコントローラなら、インバータやI/O 機器をEtherCAT 接続可能なので、LAN ケーブルを繋ぐだけの簡単配線。
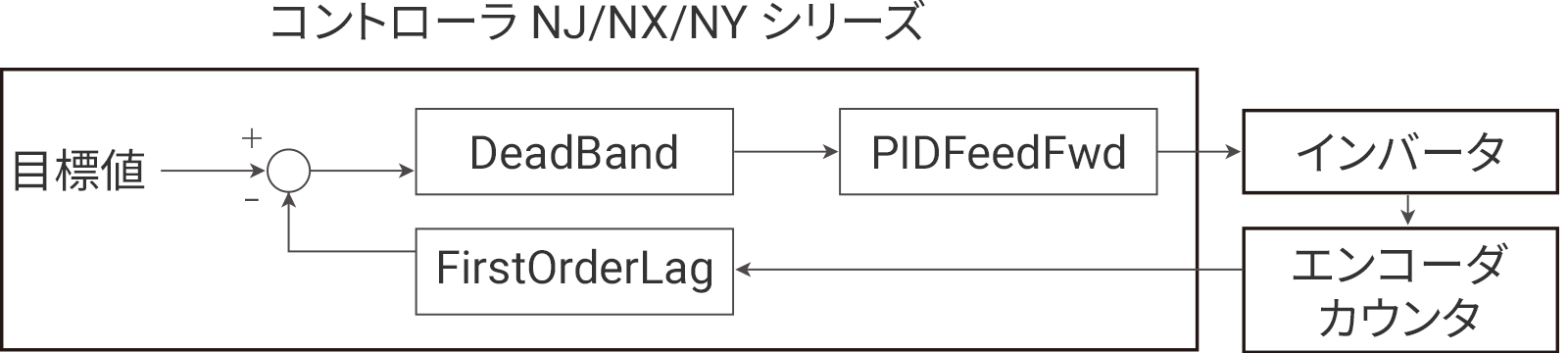
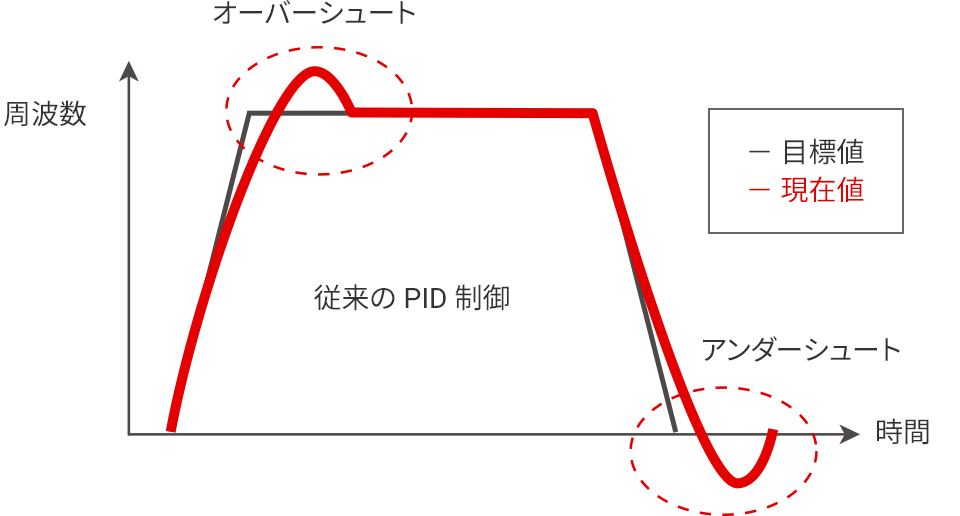
また本ライブラリのファンクションブロック(FB)を組み合わせることで、インバータを使っても安定した制御を実現できます。
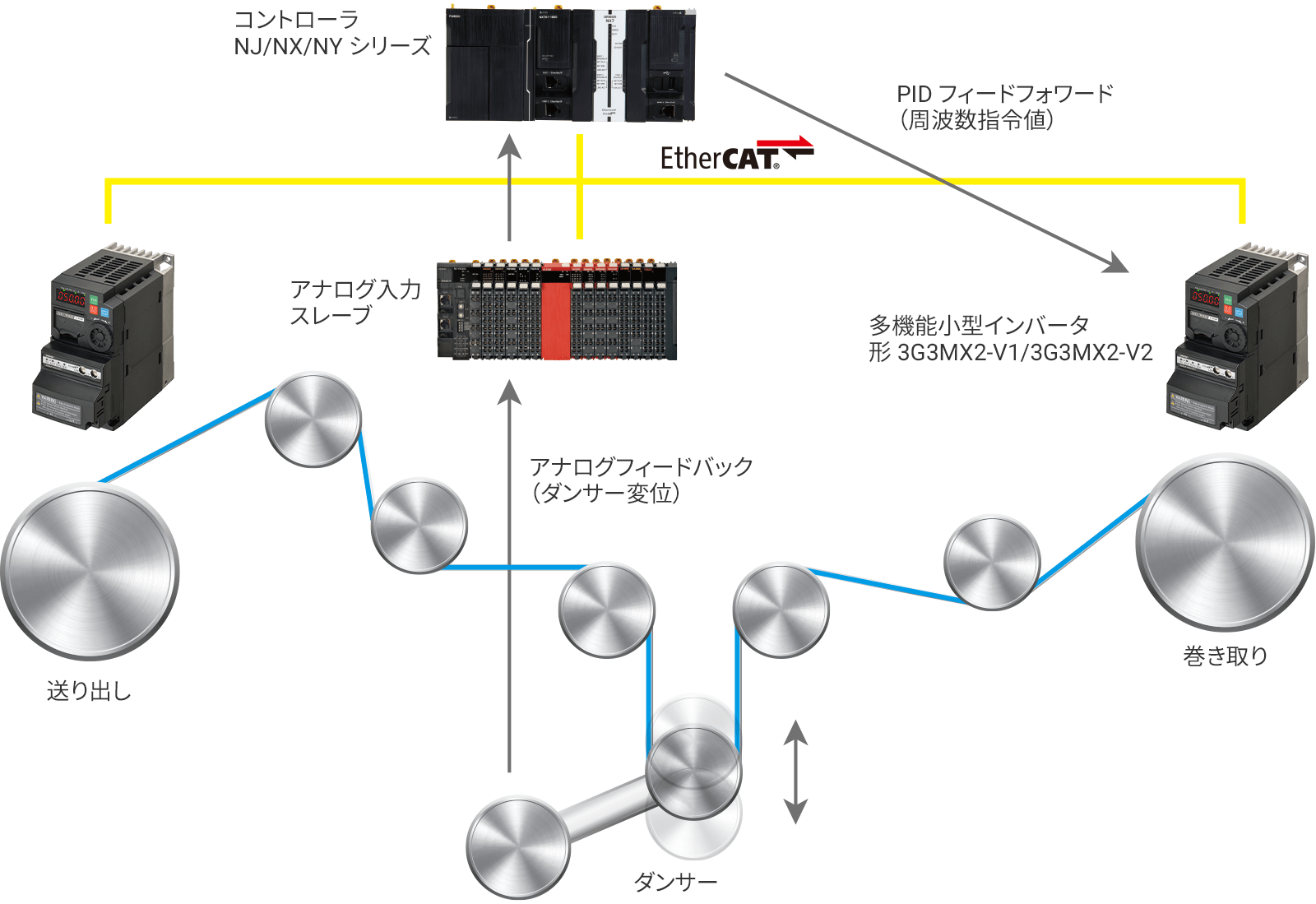
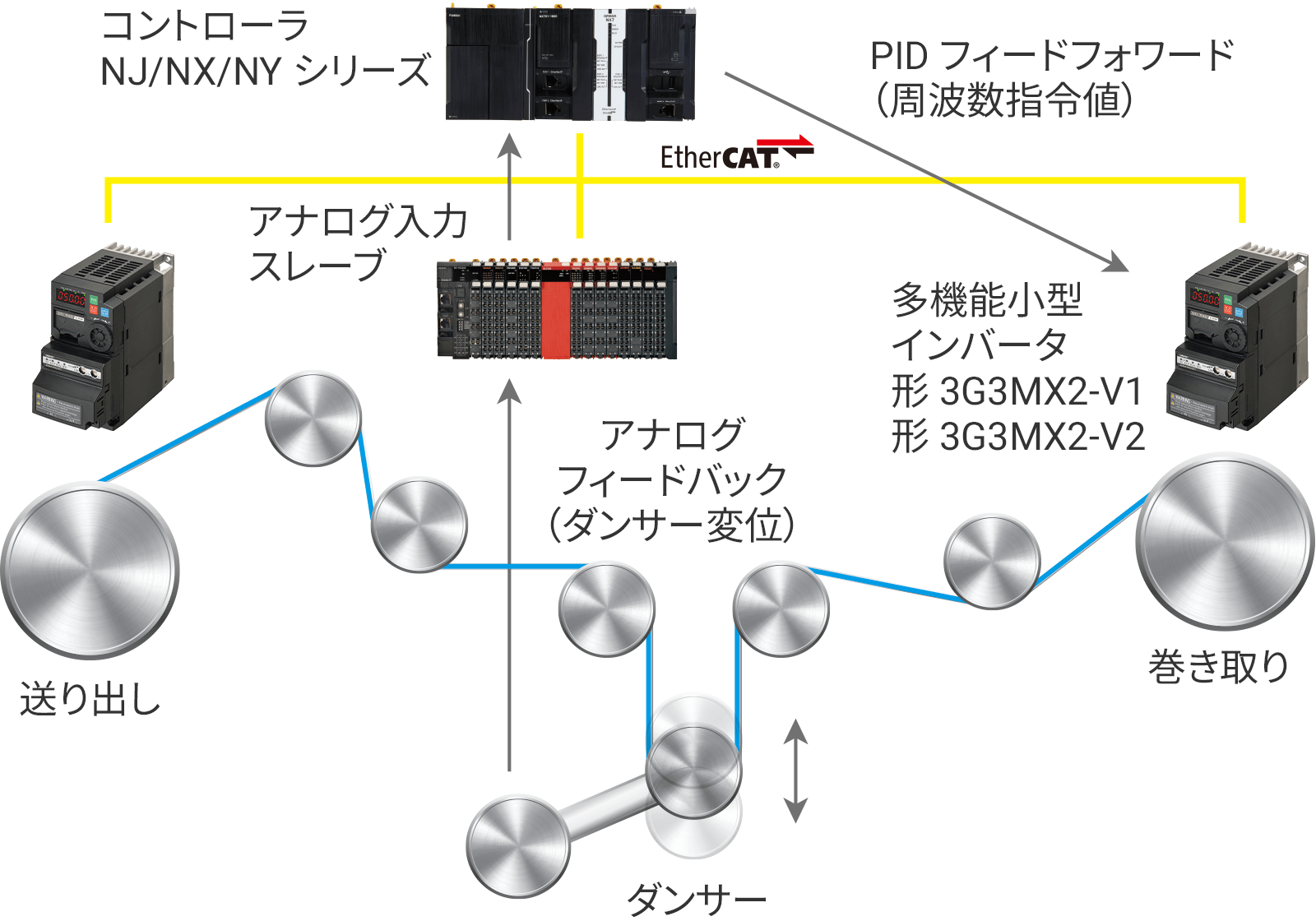


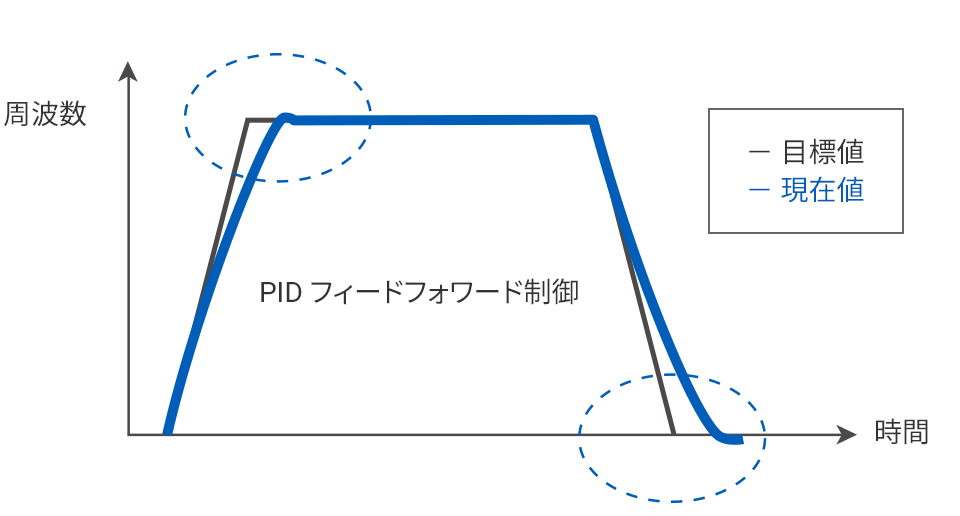
コントローラ NJ/NX /NYシリーズは、制御プログラム周期とEtherCATの通信周期が同期。フィードバック制御の演算結果を短周期かつ定周期で出力できるため、モータに対して安定した指令が可能。
尚、一部のライブラリは、ダウンロードできませんので、
当社営業担当者にお問い合わせください。