その他のセーフティスイッチ
その他のセーフティスイッチとしては、メンテナンス時等に使用するイネーブルスイッチや、モードを切り替えるためのスイッチなどが挙げられます。
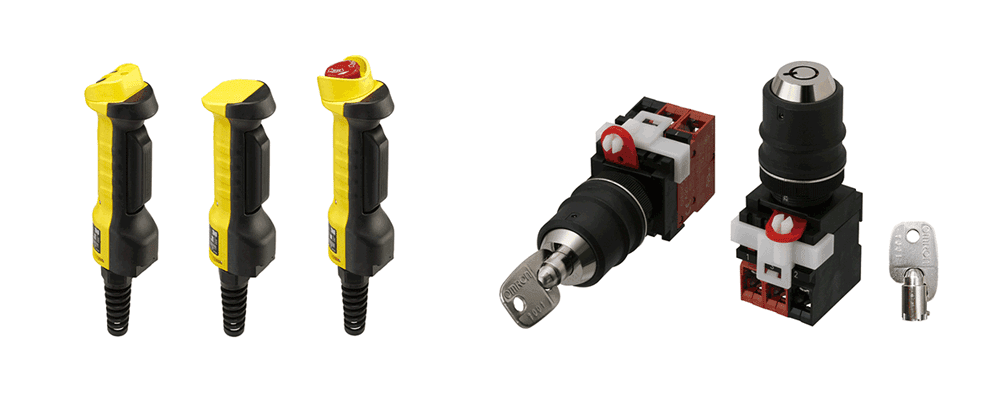
イネーブルスイッチ
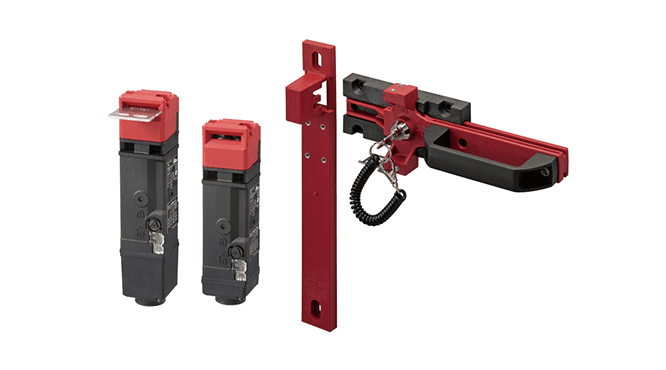
イネーブルスイッチは、柵内などの危険領域において作業者がメンテナンス等の非定常作業を行う際、作業者に携帯させ、不意の巻き込まれ危険などを防止あるいは低減するために使用する機器です。ティーチングペンダントに組み込んだり、グリップスイッチのように独立した操作機器として用いられます。
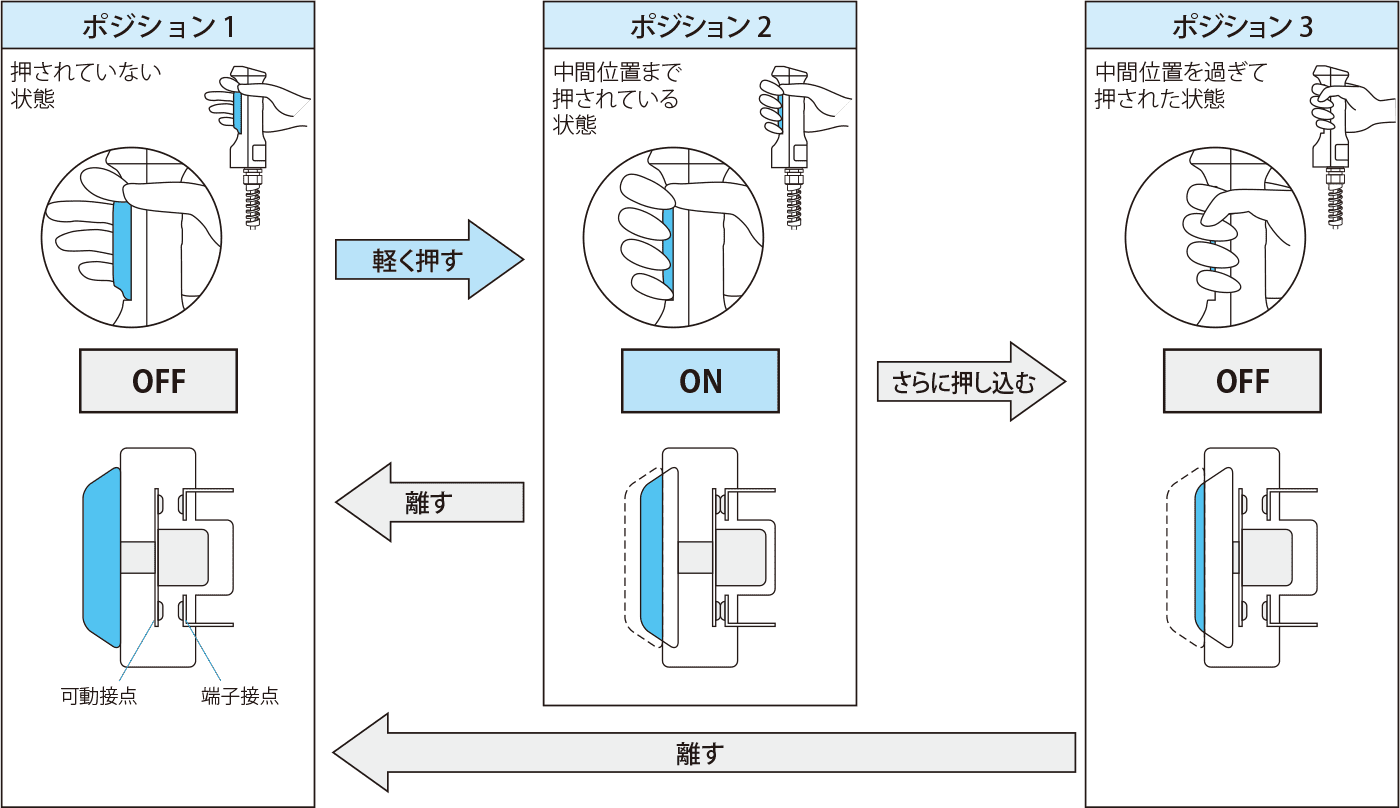
作業者が危険領域において、ロボットのティーチング、設備の段取り替え、保守やメンテナンスを行うときなど、危険源の予期しない動作や作業者の不意の行動により、危険な状態になる可能性があります。そのような状況で作業者が被災することを防ぐために、イネーブルスイッチは活用されます。イネーブルスイッチは、スイッチ部を軽く押した状態(中間位置まで押されている状態)を保持している間に限り、機器やロボットの手動運転を許可します。スイッチ部を強く握りこんだり(中間位置を過ぎて押された状態)、手を離したりする時(押されていない状態)には信号をOFFし、機械の運転を停止させることができます。この握り込んだり離したりするときに信号をOFFさせるという仕組みは人間工学的な原則に合致したものとされています。

イネーブルスイッチの構造
イネーブルスイッチはスイッチ部の押し込み量に応じた3ポジションで信号を伝達します。
ポジションごとに伝達される信号は、OFF(押されていない状態)→ON(中間位置まで押されている状態)→OFF(中間位置を過ぎて押された状態)と遷移します。
OFF-ON-OFFの3ポジション
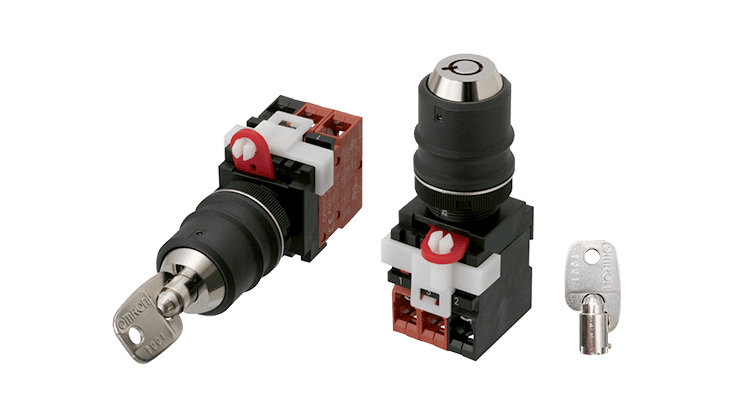
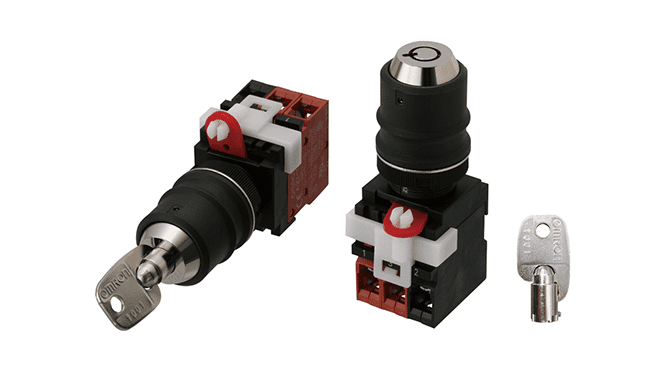
キーセレクタスイッチ
機械のメンテナンス、調整、清掃などを行う時に、運転モードからメンテナンスモードに変更するために使用します。直接開路動作機構を備えることで、確実なモードの切替を実現します。