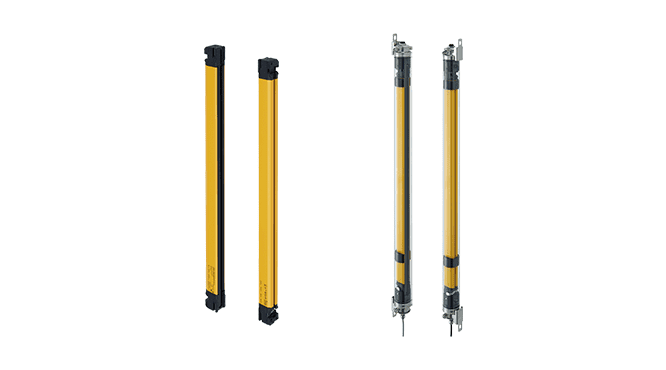
セーフティライトカーテン
安全入力機器として使用されるセーフティセンサのうち、最も代表的なものがセーフティライトカーテンです。
セーフティライトカーテンは、投光器/受光器間の光軸を遮光することで機械の危険領域への作業者の侵入を検知し、
機械を停止させるために用いられるセンサです。
人体を確実に検知できるよう、診断機能などの様々な機能を備えています。

有効開口角
有効開口角とは、セーフティライトカーテンの投光器と受光器の間での光軸の角度方向のずれの許容値を示すもので、IEC61496-2で規定されています。ライトカーテンを回転させて、出力がONからOFFに変わる時の角度を指します。光の反射の影響を少なくするため、狭い有効開口角が要求されます。タイプ4セーフティライトカーテンの場合には、投光器と受光器を3m離した際のずれが2.5°を超えると出力がOFFする設計であることが求められます。
タイプ4の場合
光軸センターラインを軸とする回転

あおり方向の回転

タイプ4センサの投光器/受光器間の距離と有効開口角の関係
| 受光器間の距離 | 3.0m | 1.5m | 0.75m | 0.5m |
|---|---|---|---|---|
| 有効開口角 | 2.5° | 5° | 10° | 14.7° |
ミューティング機能
ミューティング機能は、一時的にセーフティライトカーテンの検知機能を停止し、セーフティライトカーテンの入光・遮光にかかわらず出力のON状態を自動的に保つ機能です。
検出エリア内をワークなどが通過する際、セーフティライトカーテンの遮光による工程の停止は通常であれば避けられません。
ミューティング機能を追加すると、ワーク通過時は安全出力を自動的に保持し、人体侵入時のみ安全出力をOFFさせることができます。これにより、ワークがセーフティライトカーテンを遮光してもラインを止めることなく作業を進めることが可能になります。
部分ミューティング
ワークが検出区域を通過する際に、そのワークが遮光する部分だけの光軸を無効化するミューティングです。他の光軸は有効なため、ワーク通過部以外への人体などの侵入は常時検出することができます。また、ワーク通過時のみに作動するセンサ等を追加することにより、ワークが通過するタイミング以外などに人体の侵入があった場合に安全出力をOFFすることも可能です。

位置検出ミューティング
ロボットなどの機械の可動部が作業者にとって安全な位置にあることが確認されている場合に光軸を無効化するミューティングです。可動部が所定の位置をはずれた場合にはミューティングを終了します。

ブランキング機能
ブランキング機能は、セーフティライトカーテンの検出エリア内の一定の範囲を常時無効化する機能です。
セーフティライトカーテンの検出エリアに対して機械部品や附属品が干渉する場合などに使用することができます。
フィックスブランキング
光軸を常時遮光する物体が作業台などのように固定されている場合に用いるブランキングです。機械設計上、固定物による遮光が避けられない箇所へのセーフティライトカーテンの設置の際に有効です。

フローティングブランキング
光軸を常時遮光する物体が固定されていない場合に用いるブランキングです。遮光物体による光軸の遮光位置が移動する箇所へのセーフティライトカーテンの設置の際に有効です。