安全入力機器
セーフティセンサ
セーフティセンサとは、機械の稼働中に人体の侵入または存在を検知したら、
機械を停止させることを目的としたセンサです。

自己診断機能
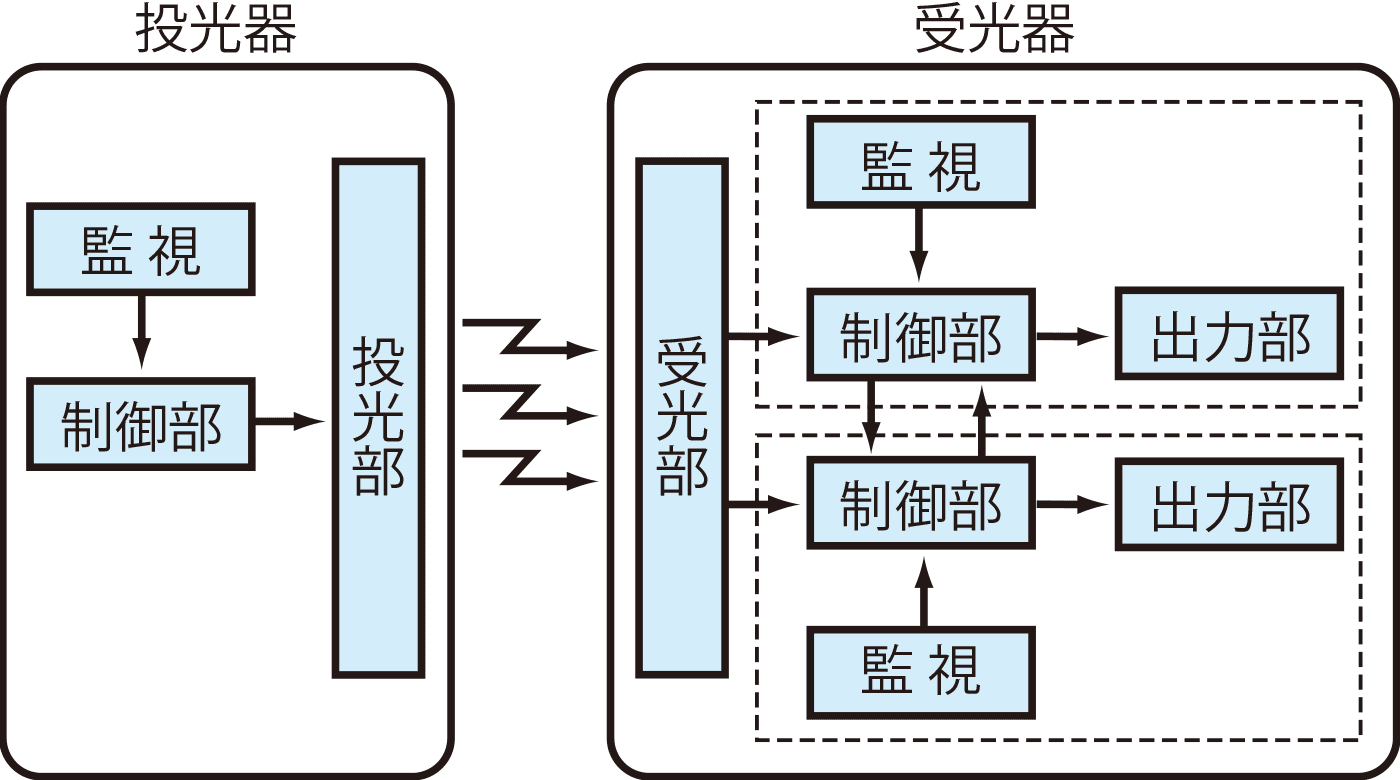
セーフティセンサ全体の要求事項を規定している規格であるIEC 61496-1では、セーフティセンサの故障を検知できる性能や故障検知の際のセンサの挙動に応じて、タイプを規定しています。セーフティライトカーテンで主に採用されているタイプ4では、ISO 13849-1のPLeに相当する性能をもつように規定されており、下図のようなデュアルCPUによる相互チェックと信号処理回路や出力回路の二重化などを行っています。セーフティレーザスキャナでは主に採用されているタイプ3では、ISO 13849-1のPLdに相当する性能をもつように規定されています。いずれもセンサ内部で自己診断機能を備えることにより、これらの性能を確保しています。
タイプ4セーフティライトカーテンの回路ブロック図
安全距離
セーフティセンサを設置する場合、人体が危険領域に侵入して可動部などの危険源に到達する前に、機械を停止させる必要があります。そのために必要な距離が、ISO 13855により規定されています。セーフティセンサの検出能力を示す最小検出物体の大きさや、セーフティセンサの設置位置を決めるためには、このISO 13855における安全距離の考え方が特に重要です。
ISO 13855による安全距離の計算式
2024年に改定されたISO 13855では、セーフティセンサと危険源との間にとるべき安全距離を、「隔離距離(separation distance, S)」と表現しています。この距離は、改定前のISO 13855では、「最小距離(minimum distance, S)」と呼ばれていました。
隔離距離(S)は、以下の考え方で求めます。
| S = (K × T) + DDS + Z |
|---|
- S=隔離距離(mm)
- K=人体又は人体部位の接近速度のデータから導いた変数(mm/s)
- T=総合システム応答時間(機械の最大停止時間+安全関連部の応答時間)(s)
- DDS=保護機器に関連した到達距離(mm)
- Z=アプリケーションに応じた追加距離要素(mm)
A. 接近方向に対して検出区域が垂直な場合
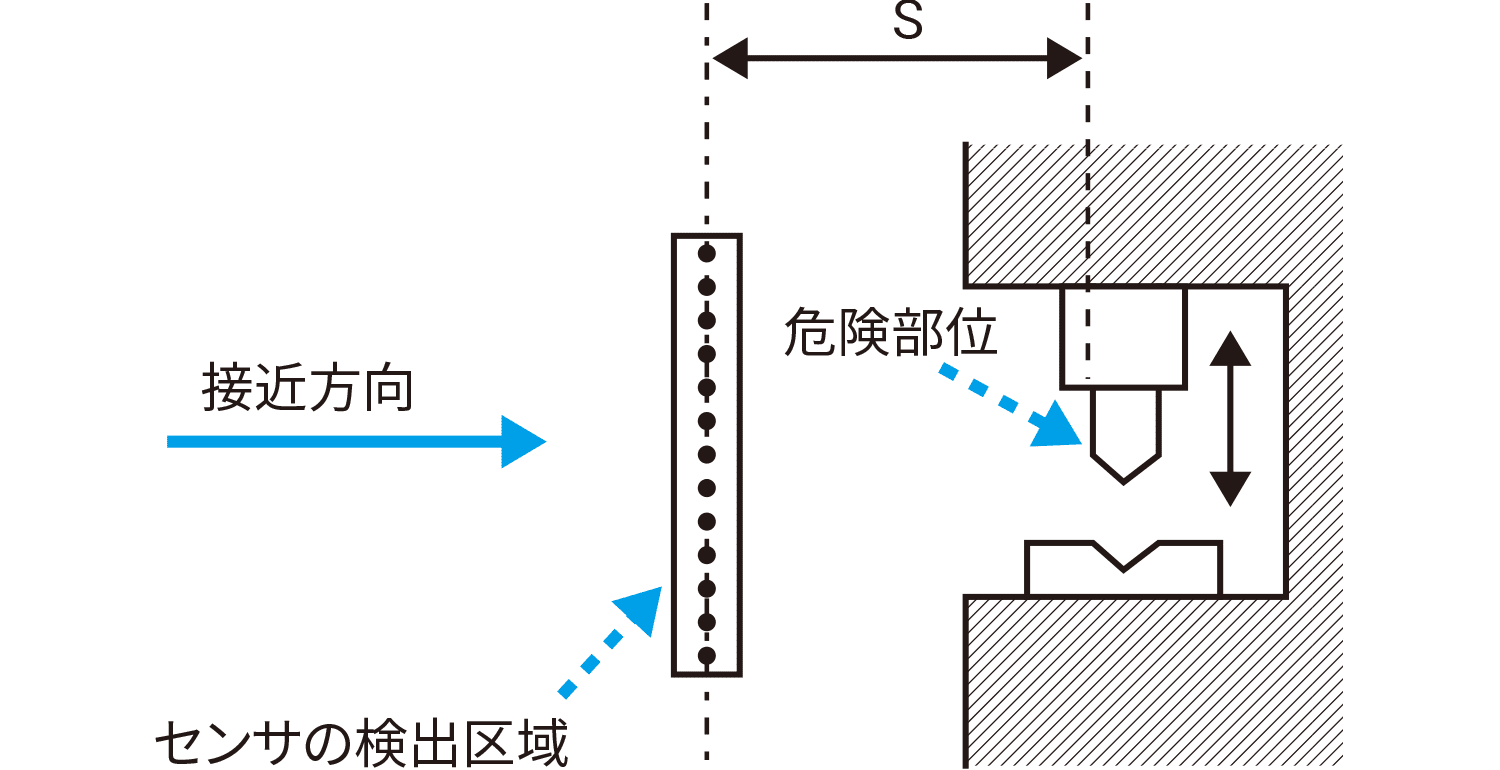
(1)セーフティセンサの検出能力が40mm以下
| S = (K × T) + 8 (de - 14) + Z |
|---|
この式に以下をあてはめて計算した値をSとします。
- K=2,000mm/s《手/腕の侵入速度を想定》
- T=総合システム応答時間(s)
- de=セーフティセンサの検出能力(mm)
- Z=アプリケーションに応じた追加距離要素(mm)《保護機器や機械の製造者が指定》
de<14mmの場合、保護機器に応じた到達距離DDS = 8 (d - 14)は0mmとする
計算結果がS<100mmとなった場合にはS=100mmを採用します。
S>500mmとなった場合にはK=1,600mm/sで再計算した値を採用します。再計算した値がS<500mmの場合には、S=500mmを採用します。
(2)セーフティセンサの検出能力が40mm超, 55mm以下
| S = (K × T) + 12de - 272 + Z |
|---|
この式に以下をあてはめて計算した値をSとします。
- K=2,000mm/s《手/腕の侵入速度を想定》
- T=総合システム応答時間(s)
- de=セーフティセンサの検出能力(mm)
- Z=アプリケーションに応じた追加距離要素(mm)《保護機器や機械の製造者が指定》
計算結果がS>500mmとなった場合にはK=1,600mm/sで再計算した値を採用します。再計算した値がS<500mmの場合には、S=500mmを採用します。
(3)セーフティセンサの検出能力が55mm超, 120mm以下
| S = (K × T) + 850 + Z |
|---|
この式に以下をあてはめて計算した値をSとします。
- K=1,600mm/s《人の歩行速度を想定》
- T=総合システム応答時間(s)
- Z=アプリケーションに応じた追加距離要素 (mm)《保護機器や機械の製造者が指定》
(4)セーフティセンサの検出能力が120mm超または不明
マルチビームセーフティセンサなどの全身を検出する用途で用いる光軸の間隔の広いセーフティセンサや、検出能力が定められていないセーフティセンサの隔離距離の計算には、(3)の式が使用できます。ただしその場合には、人がビームの間をくぐったり床を這ったりすることでビームを迂回して危険源に接近する可能性を、リスクアセスメントで考慮する必要があります。そのほかにも、ISO 13855には、セーフティセンサのビームの設置高さなどの追加要求が定められています。
B. 接近方向に対して検出区域が平行な場合
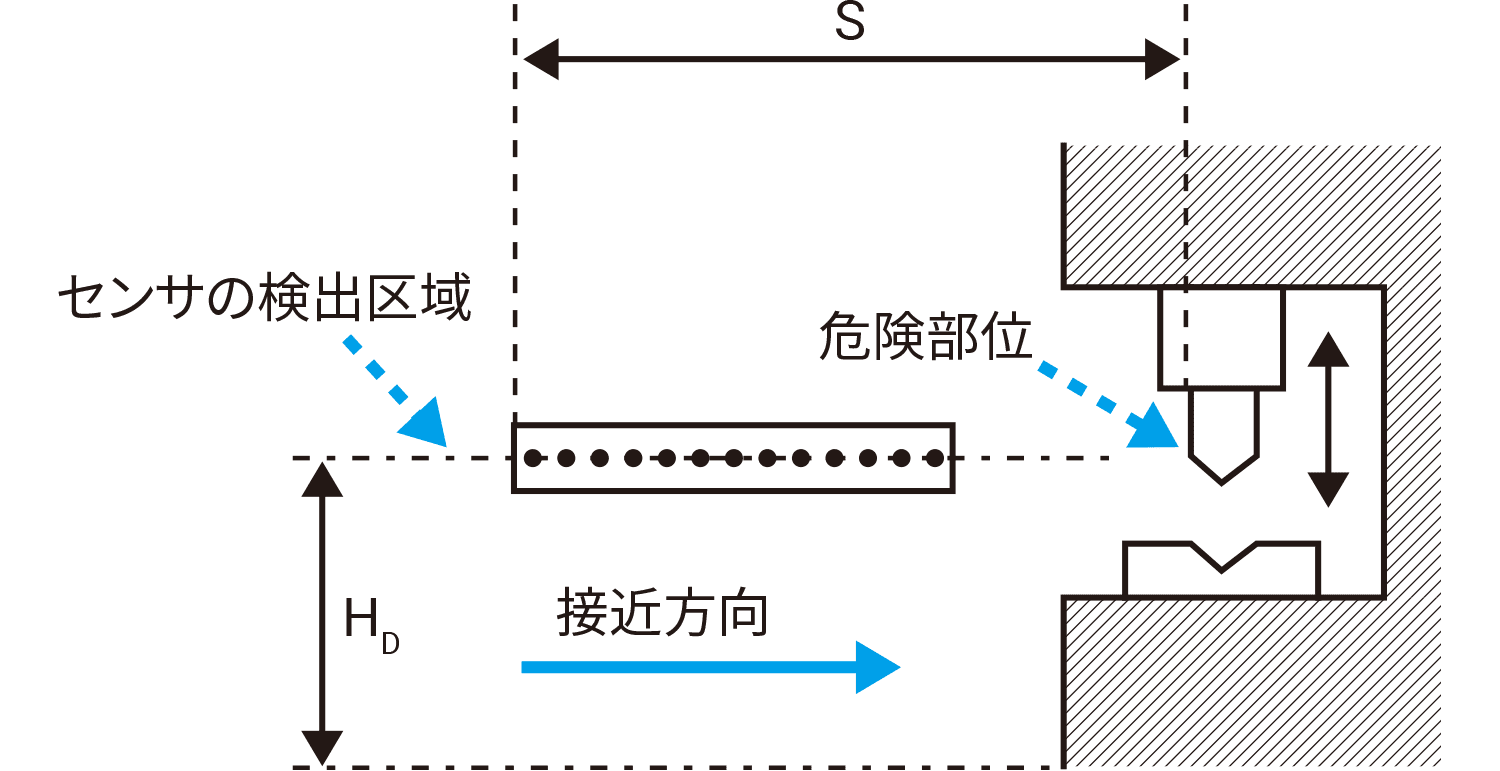
| S = (1,600 × T) + 1,200 + Z |
|---|
この式に以下をあてはめて計算した値をSとします。
- K=1,600mm/s 《人の歩行速度を想定》
- T=総合システム応答時間(s)
- Z=アプリケーションに応じた追加距離要素(mm)《保護機器や機械の製造者が指定》
検出区域が平行な場合は、セーフティセンサの設置高さ(検出区域の高さ)についても考慮する必要があります。設置高さ(HD)の計算には、以下の式を用います。
| HD ≥ 15 (de - 50) |
|---|
- de=セーフティセンサの検出能力(mm)
HDは0mmを下回らず、またHDの最大値は1000mmとします。HD>200mmのときには、検出区域の下をくぐって危険源に接近する可能性をリスクアセスメントで考慮し、追加の保護方策の設置等を検討する必要があります。
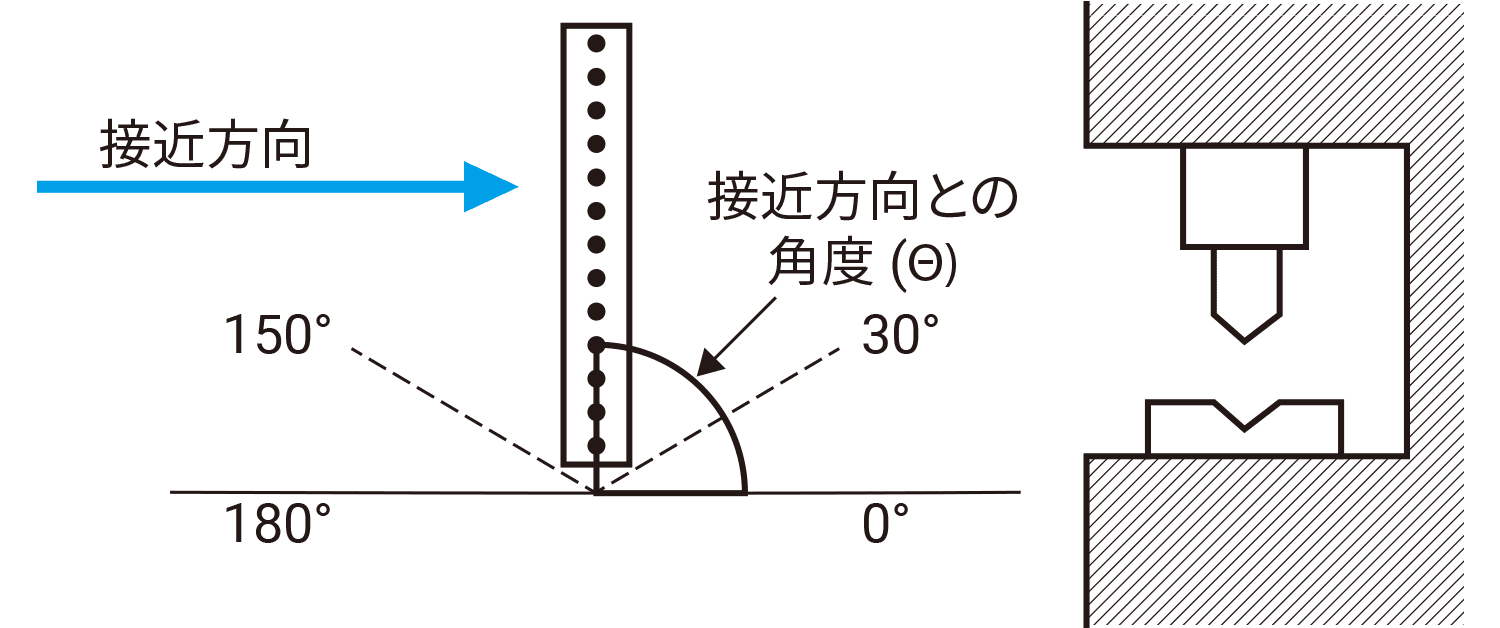
接近方向と検出区域との角度、および使用する計算式の関係
セーフティセンサを使用する場合の隔離距離(S)は、危険源への接近方向とセーフティセンサの検出区域との関係性を考慮した上で検討する必要があります。
検出区域の角度が、接近方向に対して30° <Θ<150°の角度で設置されている場合は、垂直接近とみなすことができます。この場合は、Aの計算式を適用して隔離距離を計算します。
検出区域の角度が、接近方向に対して30°≧Θまたは Θ≧150°(180°まで)の角度で設置されている場合は、平行接近とみなすことができます。この場合は、Bの計算式を適用して隔離距離を計算します。
これらの安全距離(隔離距離)の考え方は、セーフティセンサ以外にも、ロック機能をもたないガードインターロックスイッチや両手押しボタンなどの両手操作機器、セーフティマットの設置位置を決定する際にも考慮する必要があります。また、いずれの場合においても、人が検出区域を迂回して危険源に接近する可能性の考慮や、規格で求められる他の要素も検討した上で、必要な隔離距離を計算しなければなりません。詳細についてはISO 13855をご確認ください。
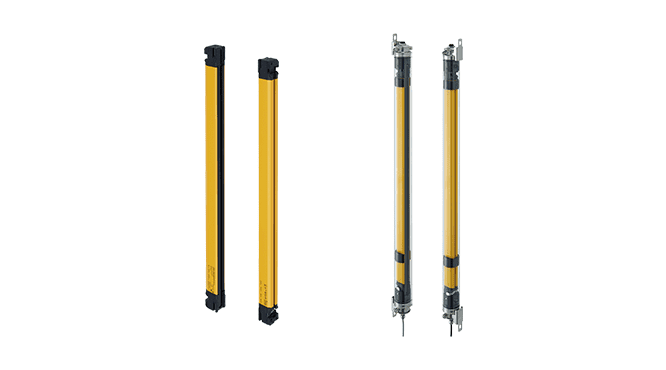
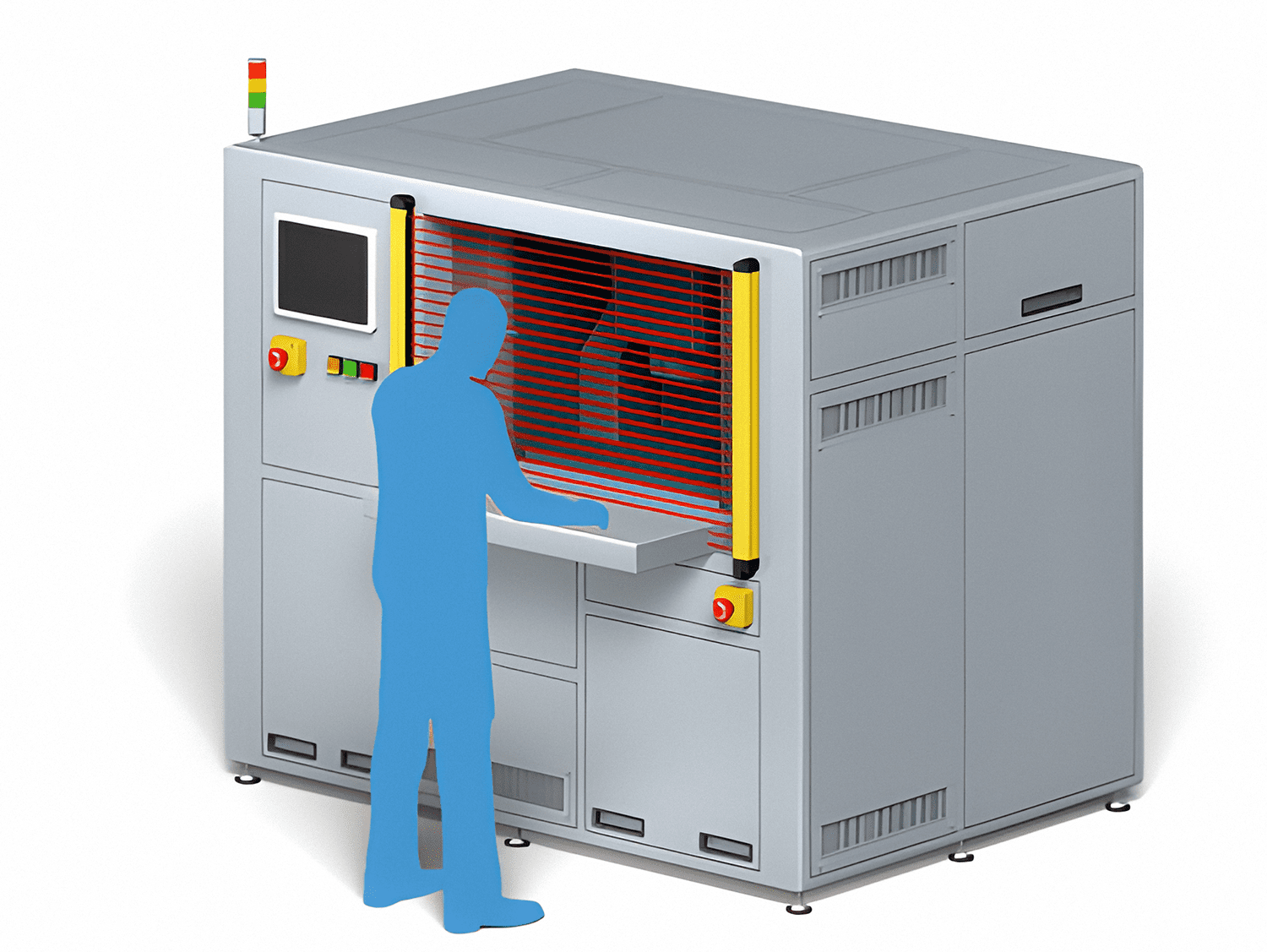
セーフティライトカーテン
安全入力機器として使用されるセーフティセンサのうち、最も代表的なものがセーフティライトカーテンです。
セーフティライトカーテンは、投光器/受光器間の光軸を遮光することで機械の危険領域への作業者の侵入を検知し、機械を停止させるために用いられるセンサです。
人体を確実に検知できるよう様々な機能を備えています。

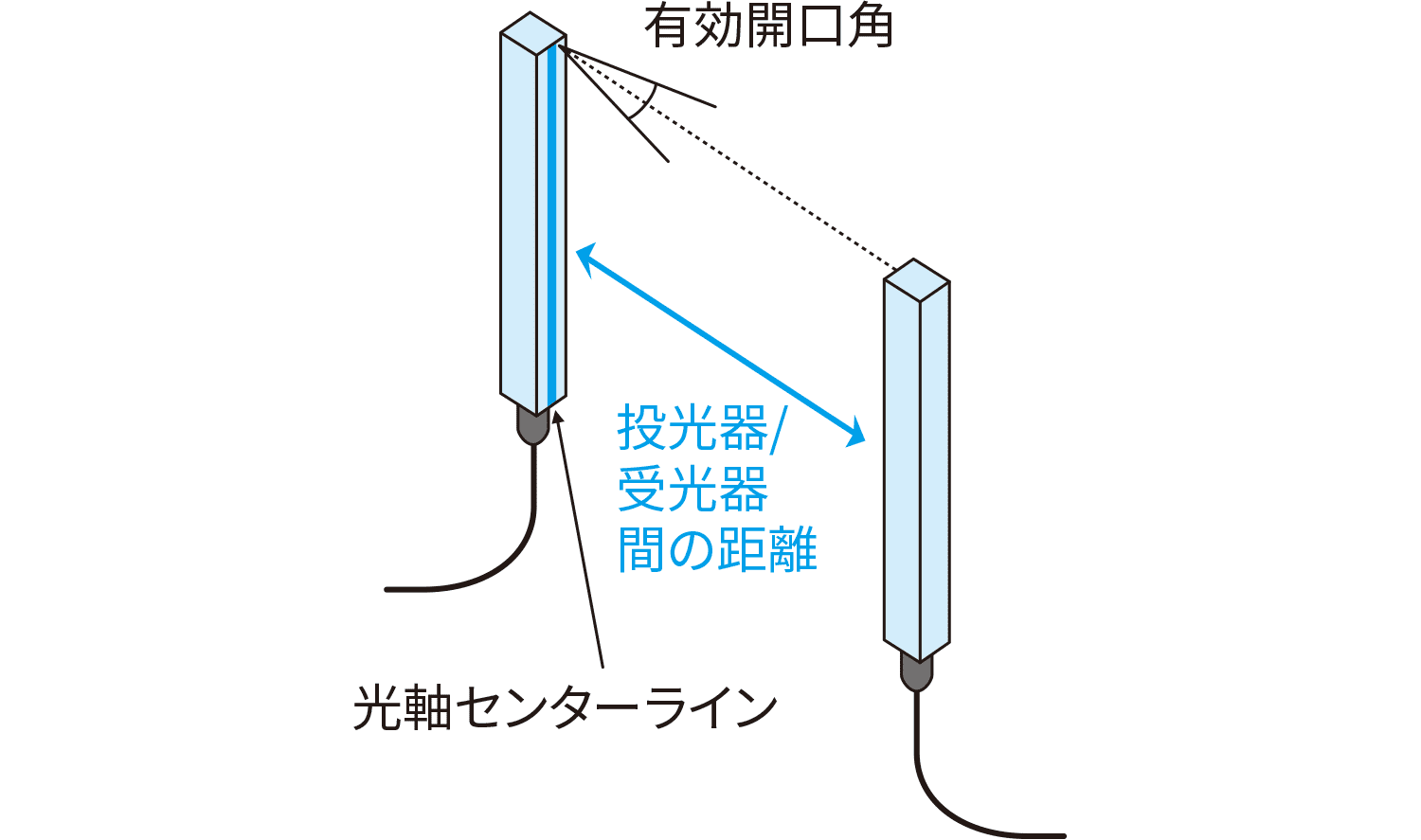
有効開口角
有効開口角とは、セーフティライトカーテンの投光器と受光器の間での光軸の角度方向のずれの許容値を示すもので、IEC 61496-2で規定されています。ライトカーテンを回転させて、出力がONからOFFに変わる時の角度を指します。光の反射の影響を少なくするため、狭い有効開口角が要求されます。タイプ4セーフティライトカーテンの場合には、投光器と受光器を3m離した際のずれが2.5°を超えると出力がOFFする設計であることが求められます。
光軸センターラインを軸とする回転
あおり方向の回転
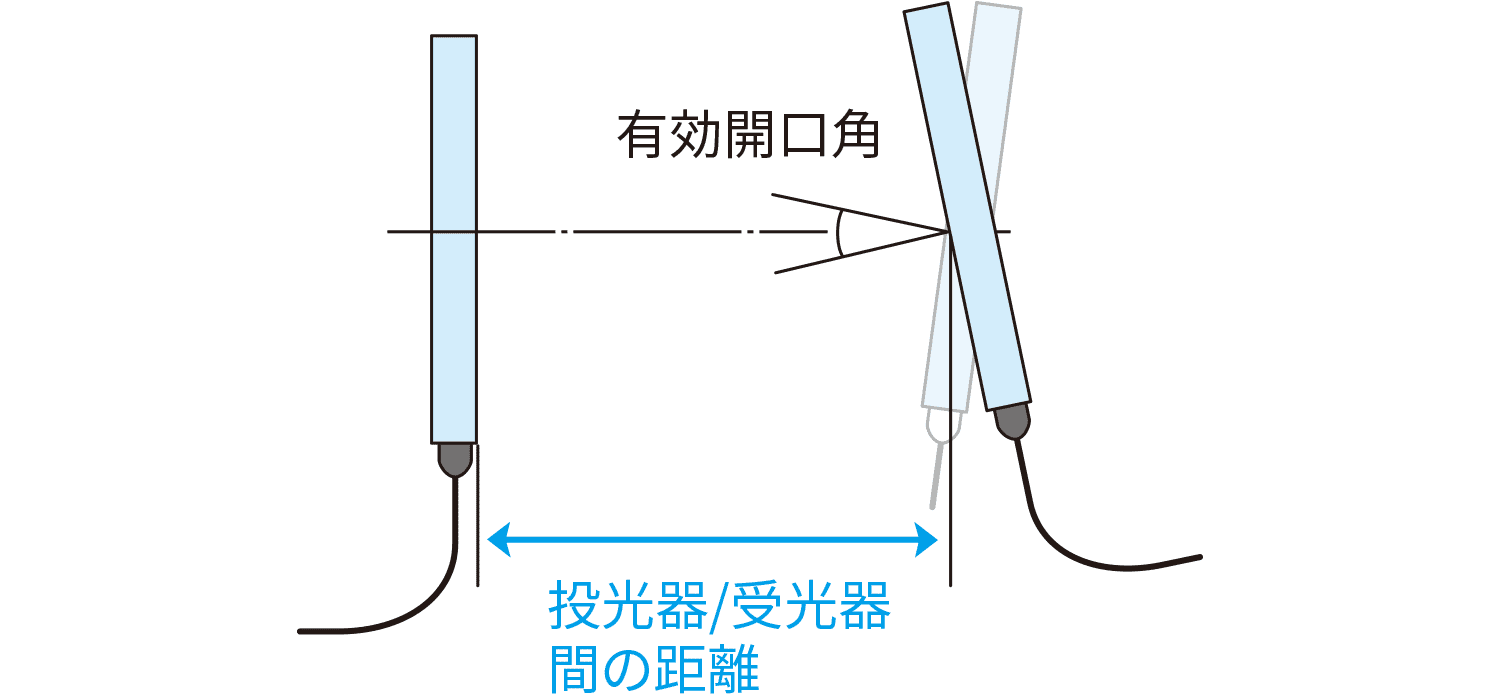
タイプ4センサの投光器/受光器間の距離と有効開口角の関係
| 投光器/受光器間の距離 | 3.0m | 1.5m | 0.75m | 0.5m |
| 有効開口角 | 2.5° | 5° | 10° | 14.7° |
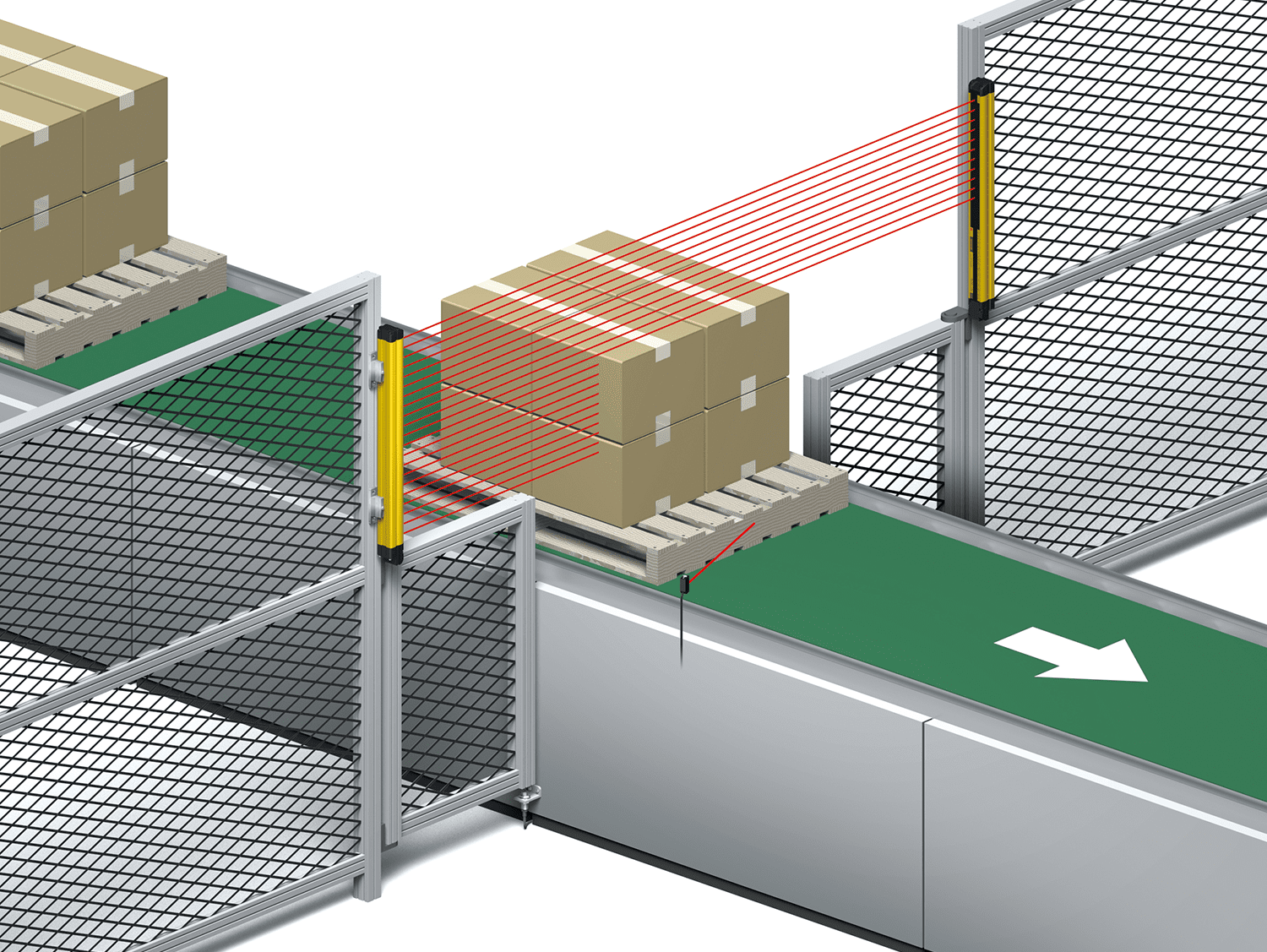
ミューティング機能
ミューティング機能は、一時的にセーフティライトカーテンの検知機能を停止し、セーフティライトカーテンの入光・遮光にかかわらず出力のON状態を自動的に保つ機能です。
検出エリア内をワークなどが通過する際、セーフティライトカーテンの遮光による工程の停止は通常であれば避けられません。ミューティング機能を追加すると、ワーク通過時は安全出力を自動的に保持し、人体侵入時のみ安全出力をOFFさせることができます。これにより、ワークがセーフティライトカーテンを遮光してもラインを止めることなく作業を進めることが可能になります。
部分ミューティング
ワークが検出区域を通過する際に、そのワークが遮光する部分だけの光軸を無効化するミューティングです。他の光軸は有効なため、ワーク通過部以外への人体などの侵入は常時検出することができます。また、ワーク通過時のみに作動するセンサ等を追加することにより、ワークが通過するタイミング以外などに人体の侵入があった場合に安全出力をOFFすることも可能です。
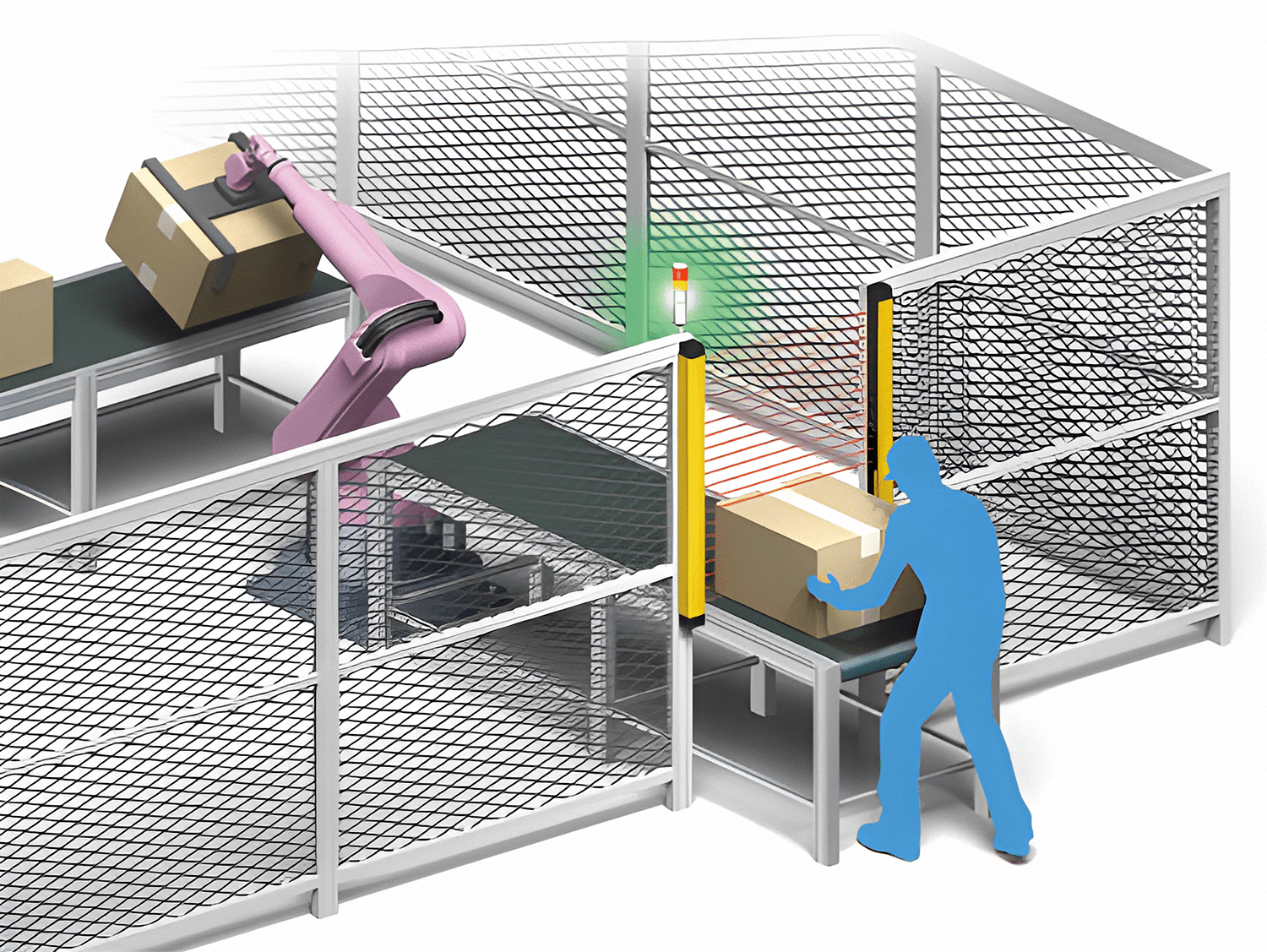
位置検出ミューティング
ロボットなどの機械の可動部が作業者にとって安全な位置にあることが確認されている場合に、光軸を無効化するミューティングです。可動部が所定の位置をはずれた場合には、ミューティングを終了します。
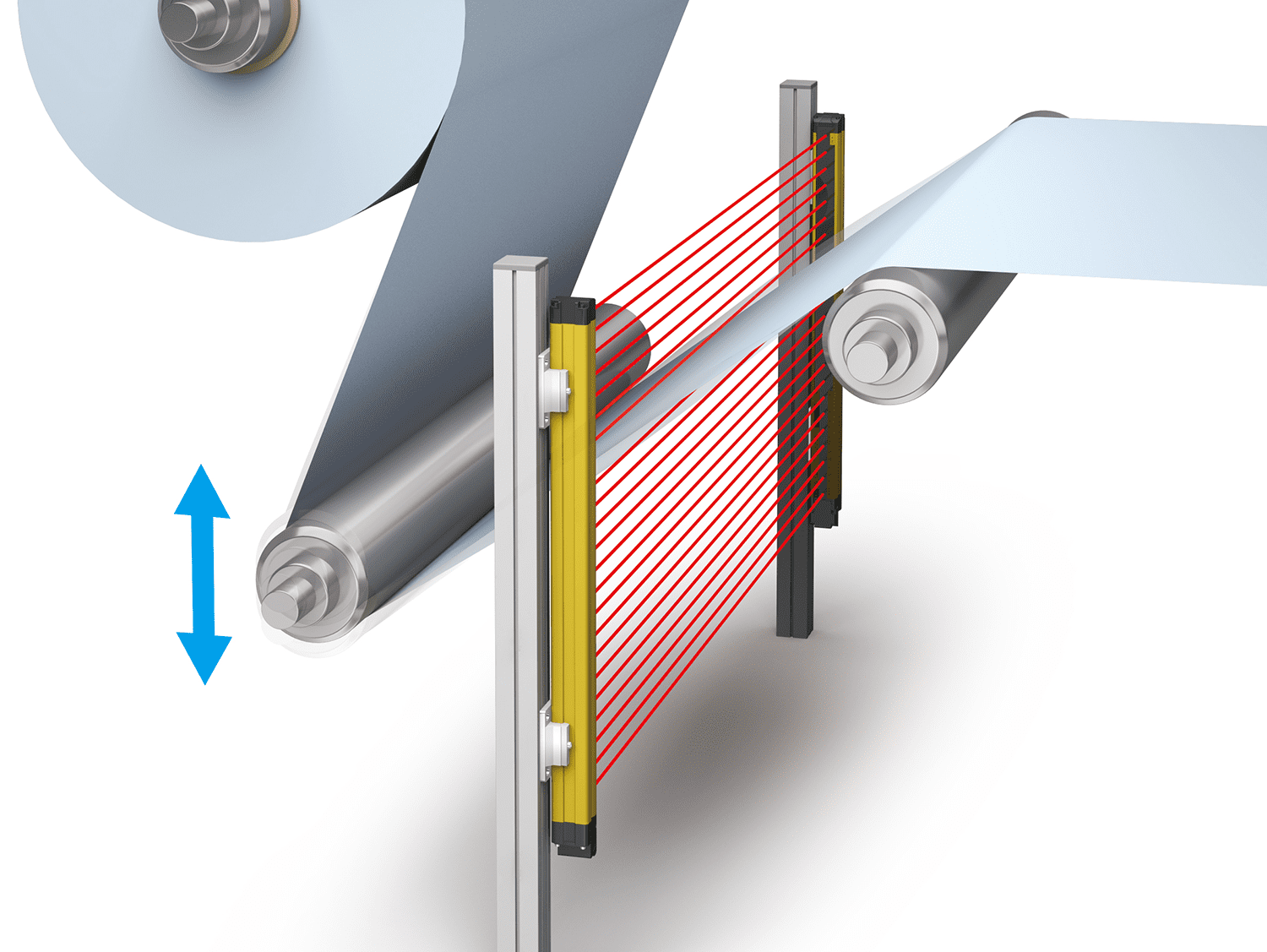
ブランキング機能
ブランキング機能は、セーフティライトカーテンの検出エリア内の一定の範囲を常時無効化する機能です。
セーフティライトカーテンの検出エリアに対して機械部品や附属品が干渉する場合などに使用することができます。
フィックスブランキング
光軸を常時遮光する物体が、作業台などのように固定されている場合に用いるブランキングです。機械設計上、固定物による遮光が避けられない箇所へのセーフティライトカーテンの設置の際に有効です。
フローティングブランキング
光軸を常時遮光する物体が、ワークのように固定されていない場合に用いるブランキングです。遮光物体による光軸の遮光位置が移動する箇所へのセーフティライトカーテンの設置の際に有効です。
セーフティレーザスキャナ
セーフティレーザスキャナは、検出区域の形状や大きさを自由に変更することができるという特徴をもったセーフティセンサです。
あらかじめ設定された検出区域内での作業者の存在を検知して機械を停止するために用いられます。

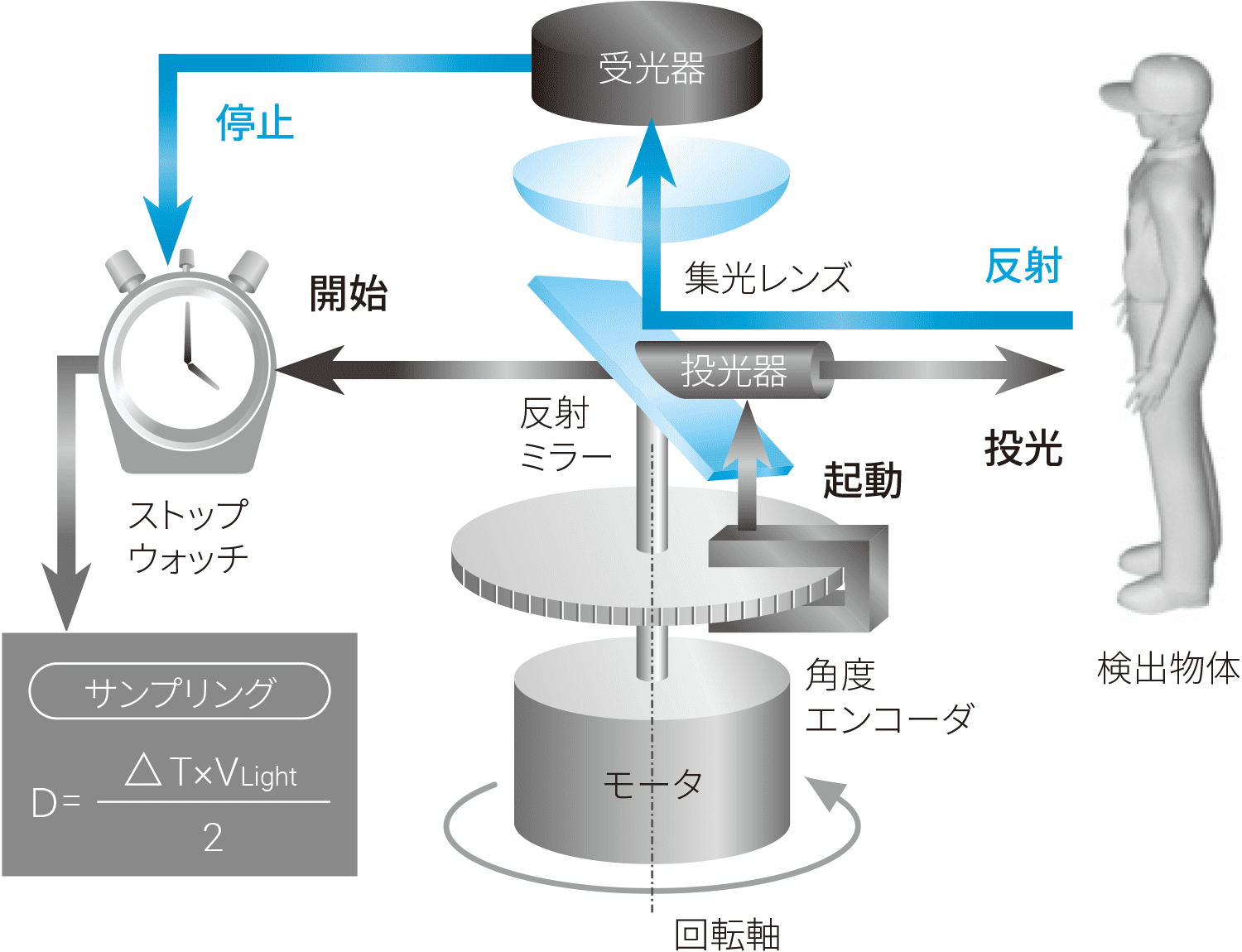
セーフティーレーザスキャナの構造
セーフティレーザスキャナは、下図のようにレーザビームを放射し、周囲の物体に当たって反射、受光するまでの時間により物体までの距離を計算しています。この機能により、検出区域内に近付く作業者が稼働中の機械と接触することを防ぐことが可能です。