モーションスペクトル分解 超高速位置比較機能 ガントリ・クロスカップリング制御 位置補正機能 トルク補正 デュアルフィードバック
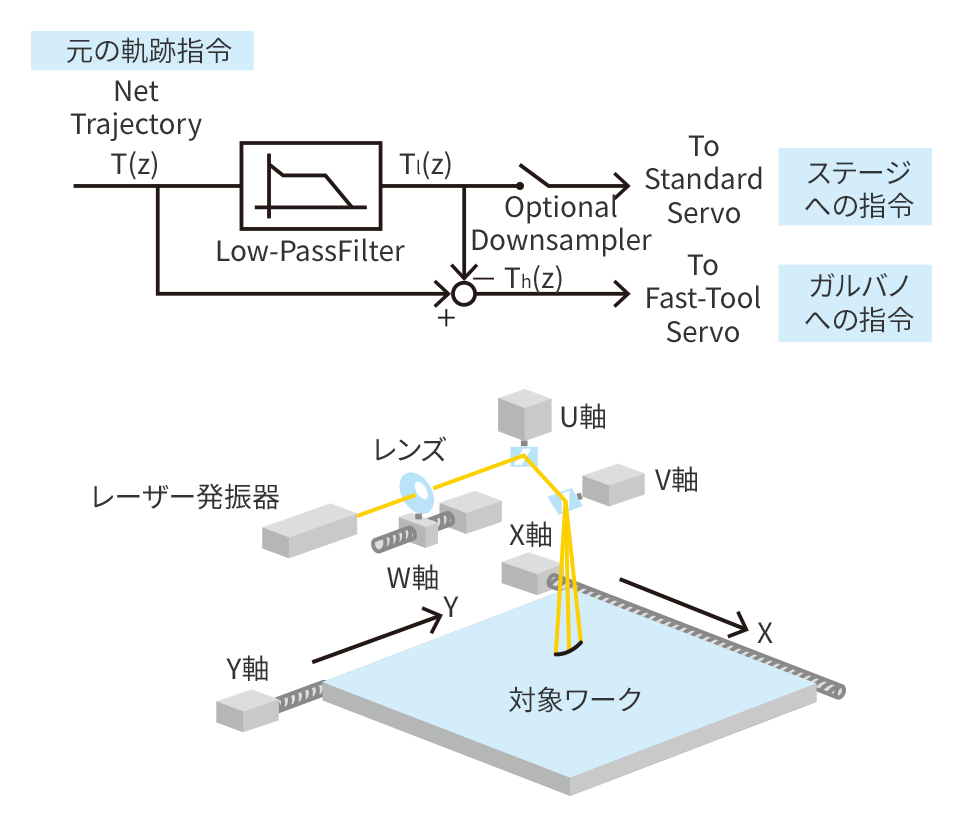
モーションスペクトル分解
一つの軌跡指令を応答性の異なる2軸に自動的に振り分ける機能です。例えばガルバノ(高応答)とXYステージ(長ストローク)の同時制御などに有効です。
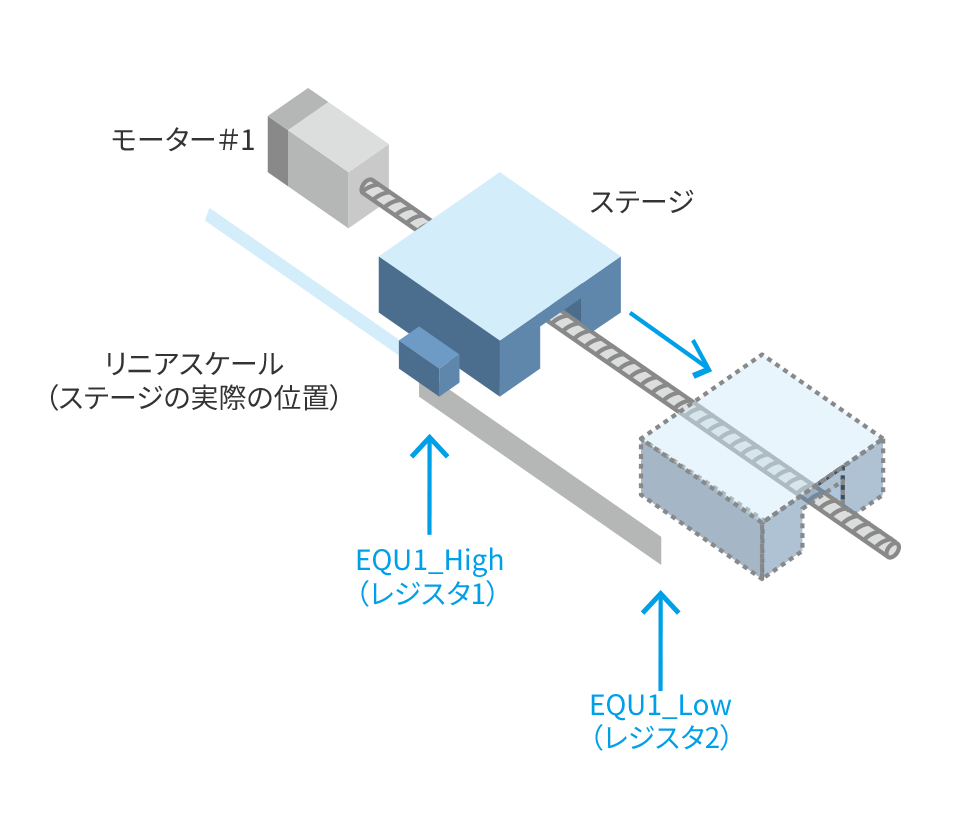
超高速位置比較機能
ハードウェア処理で位置が一致した時にパルスを出力します(100ns以下で反応)。指令ではなく実際の位置を見て出力を制御するため、正確に同期を取ることができます。
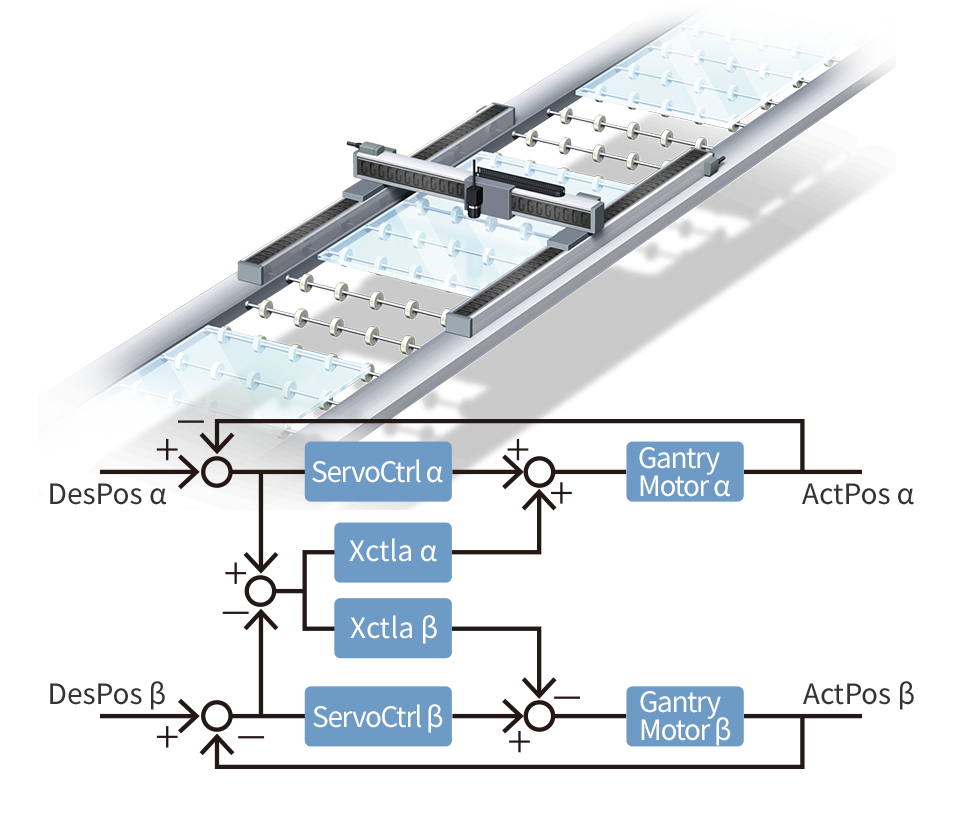
ガントリ・
クロスカップリング制御
メカ機構で結合されたガントリの平行2軸を、リアルタイムに位置をモニタし、ヨーイングを抑えて正確に同期動作させる機能です。
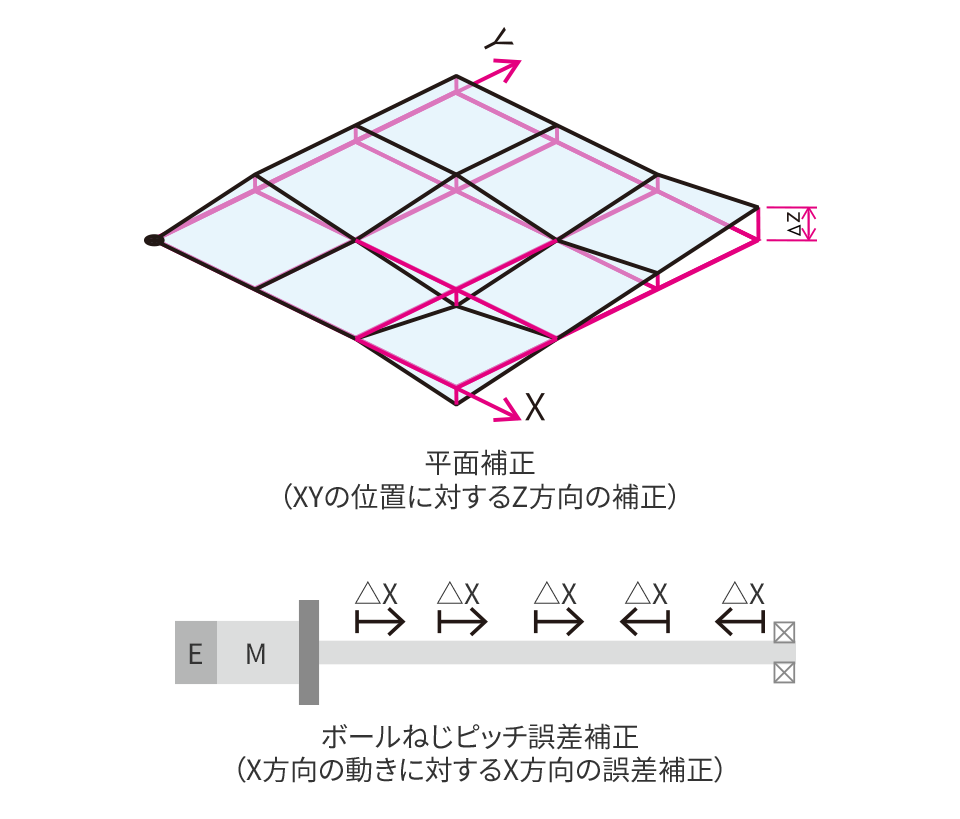
位置補正機能
メカ機構で結合されたガントリの平行2軸を、リアルタイムに位置をモニタし、ヨーイングを抑えて正確に同期動作させる機能です。
トルク補正
モータのコギングトルクやメカ機構による速度ムラを抑制する機能です。
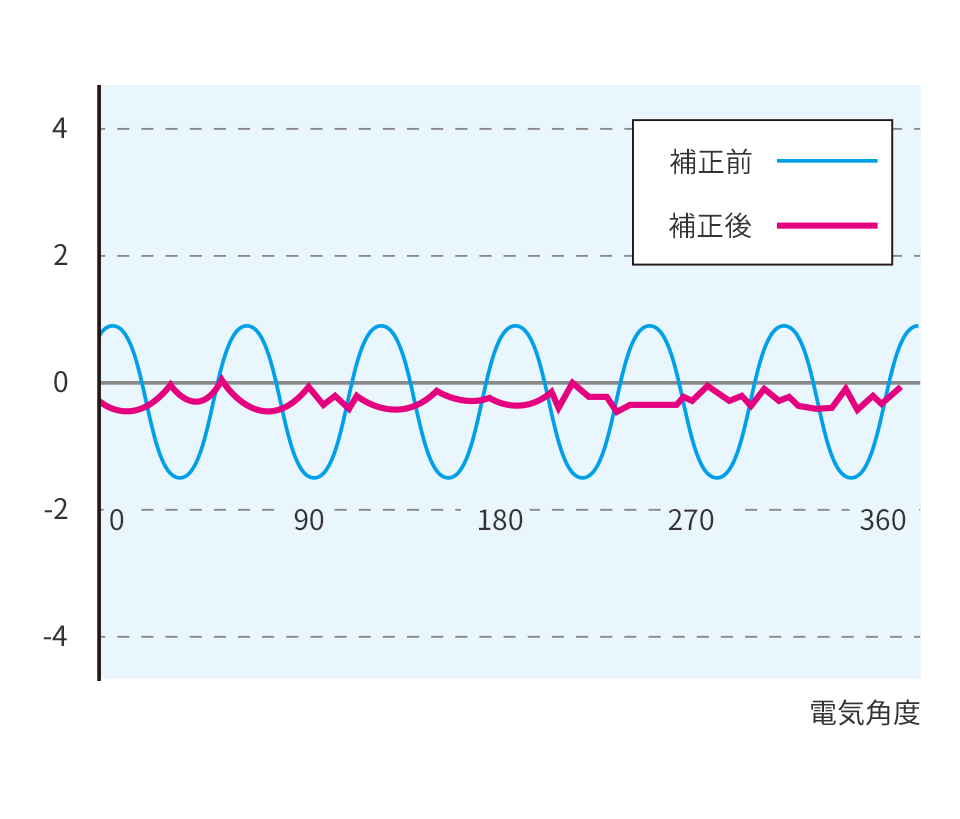
コギングトルク
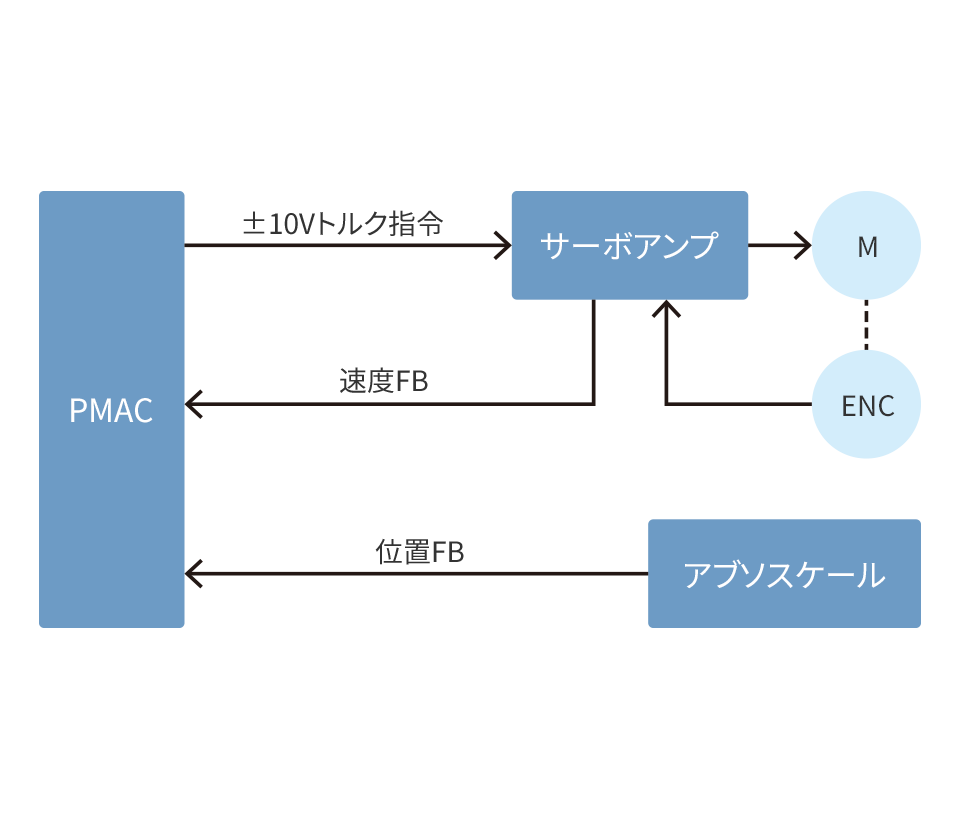
デュアルフィードバック
サーボからの速度フィードバックと、リニアスケールなど外部デバイスからの位置フィードバックを併用することで、より高精度な制御が可能です。(高精度プレス機の下死点位置制御など)