PMACセミナのご案内
PMACを使ってモーションコントロールを学習するセミナを、下記ポリテクセンター及びポリテクカレッジにて開催しています。高精度モーションコントロールボードとパソコンの組み合わせにより、サーボモータを思い通りに制御する方法について習得できます。
コース名
モーションコントロールボードを利用したアプリケーション開発技術者向け
モーションコントロール機器の制御技術(3日間)
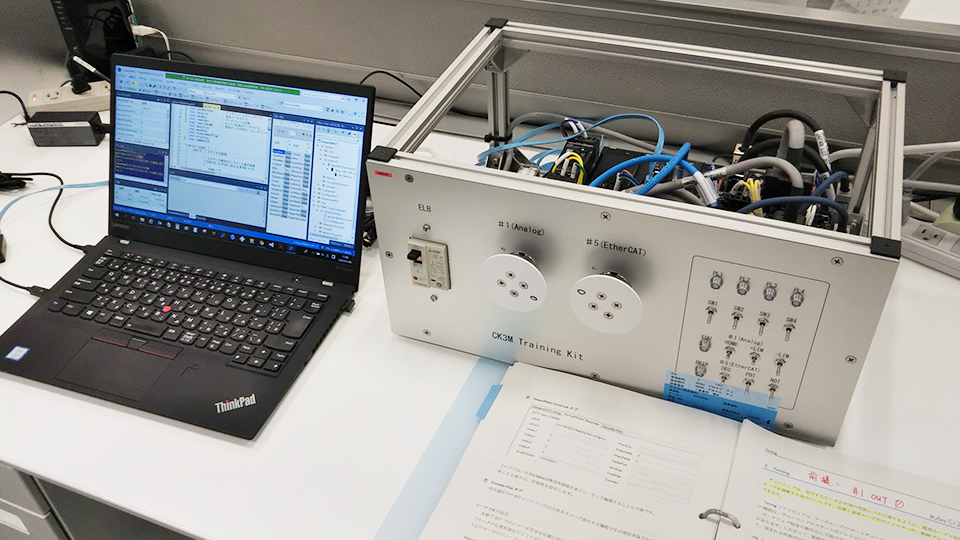
コース受講風景


開催スケジュール
| 受講場所 | コース名 | 日程 |
|---|---|---|
高度ポリテクセンター(千葉県幕張) |
X0151 モーションコントロール機器の制御技術 |
令和8年 4/22(水)~4/24(金) |
| X0152 モーションコントロール機器の制御技術 |
令和8年 7/22(水)~7/24(金) | |
| X0153 モーションコントロール機器の制御技術 |
令和8年 9/30(水)~10/2(金) | |
| X0154 モーションコントロール機器の制御技術 |
令和8年 12/16(水)~12/18(金) |
受講料
各ポリテクセンター及びポリテクカレッジにお問合せください。
定員
10名
コース概要
高精度モーションコントロールボードとパソコンの組み合わせにより、サーボモータを思い通りに制御する方法について習得します。
また、負荷の状況に応じたモータのチューニングに必要な各種パラメータなどの設定方法について習得し、ユーザーのノウハウを活かしたアプリケーション開発に必要な要素技術を習得できます。
使用機器等
Power PMAC+サーボモータ(写真は実習装置の一例になります)
講師
オムロン株式会社 担当エンジニア
ご受講に際して
1日の開講時間は6時間(計18時間) となります。
開始・終了時刻は各ポリテクセンター及びポリテクカレッジにお問合せください。
カリキュラム
| 教科項目 | 教科細目 |
|---|---|
| 1.コース概要及び留意事項 | (1)コースの目的 (2)専門的能力の現状確認 (3)安全上の留意事項 |
| 2.モーションコントロール概要 | (1)モーションコントロールの概要 (2)動向・導入事例 |
| 3.制御システム構築 | (1)モーションコントロールボードの概要 イ.OS環境、プログラム言語等について (2)開発環境について (3)実習機材のシステム構成 (4)各種インターフェース及び構造体について |
| 4.モータ設定 | (1)各種パラメータの設定 (2)エンコーダフィードバックの仕組み (3)コントローラとドライバの役割 (4)モータチューニングについて イ.PID制御 ロ.フィードフォワード制御 (5)チューニング実習 |
| 5.モーションコントロール制御実習 | (1)モータ動作 (2)ジョグ送り及び速度と加速度の制御 (3)原点復帰及びキャプチャ機能について (4)座標系の設定 (5)直線補間の動作モードについて (6)位置決めスライダーの制御 (7)円弧補間の動作モードについて (8)Cプログラムとスクリプトプログラムの使い分け (9)ユーザーサーボルーチンによるサーボ制御 |
| 6.まとめ | (1)訓練コース内容のまとめ |
受講者の声
- これから使用する予定のPower PMACになれることができた。
- ソフト構造が理解できた。
- 機能が多く、全体的に駆け足な講習だと感じました。それでも非常に分かりやすく丁寧に教えていただけたため十分に理解できました。
- 課題に対して明確な対応方法が学べた。
- PMACのコマンドについて理解が深まりました。IDEの使い方について分かりました。PMACの考え方をより理解できたと思います。