キネマティクス演算
PMACでロボットを制御した
デモ機例
PMACはロボットを制御することも可能です。
ロボット動作に必要な運動学演算式(インバース/フォワード・キネマティクス)を実装する領域がお客様に開放されていますので、お客様のメカ機構に合わせた制御を実装可能です。
運動学演算式はC言語で記述できるため、複雑な演算も高速に処理されます。
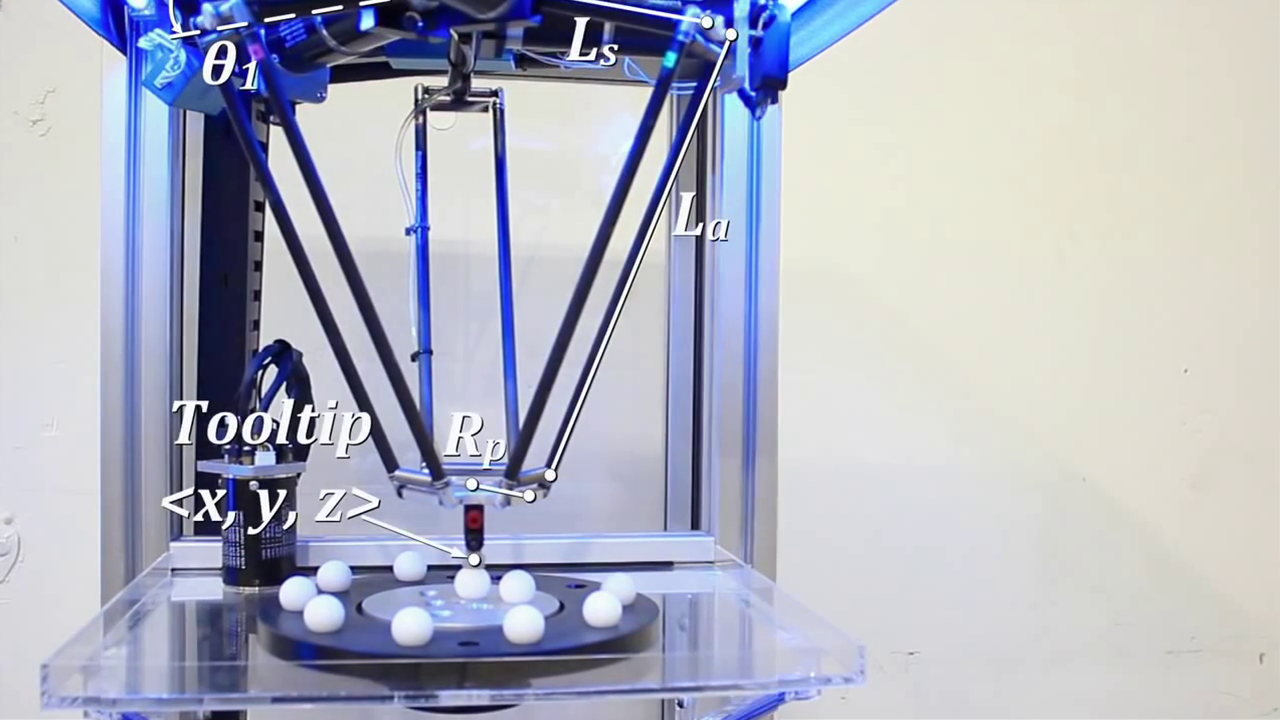
※動画のデルタロボットの他、スチュワートプラットフォームの
パラレルリンクロボットや垂直多関節ロボットも制御事例あり