
【Rapid】高速制御周期でさらなる高精度加工を実現
制御周期25μs/5軸*1という超高速サーボサイクル演算で、高精度な指令演算と高精度な指令追従性を実現し、お客様の装置のさらなる高精度化へと導きます。
*1.モータ制御のみの場合。2022年11月当社調べ
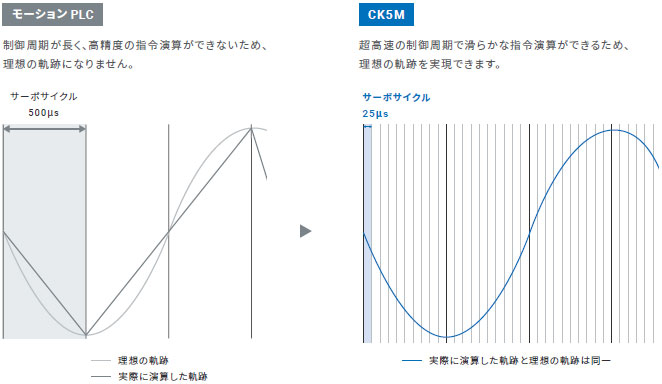
高速の指令演算で高精度加工を実現
精度の高い加工を実現するには、高精度な指令が不可欠です。
CK3M/CK5Mシリーズは超高速の制御周期で高精度な指令演算が可能です。
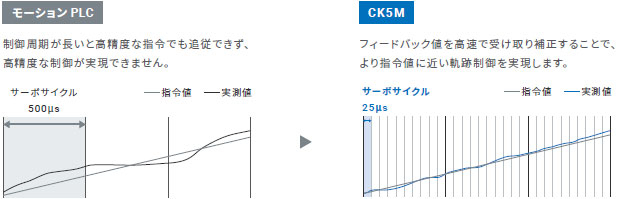
高速補正で指令値に追従し、高精度な加工を実現
高精度な指令があれば、それに追従することで高精度モーション制御が実現します。
CK3M/CK5Mシリーズは高速な制御周期でアクチュエータを動作させることができ、高精度な軌跡制御を実現します。
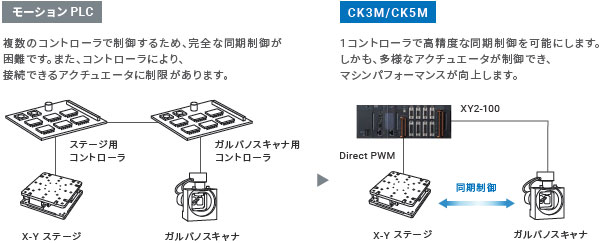
【Flexible】マルチベンダ対応で最適な機器構成が可能
マルチベンダのアクチュエータ・スケールに対応のインタフェースと制御モードにより、周辺機器の制約から解放し、お客様の装置を最高パフォーマンスまで導きます。
多様なインタフェースで最適な機器構成が可能
入力インタフェースではA/B相信号、正弦波信号、シリアルデータI/Fに対応し、制御指令のインタフェースもアナログ指令(DAC)、Direct PWM*2による軸制御に対応しています。高精度なスケールや精密なリニアモータ、高精度なガルバノスキャナなどにつながり、お客様のアプリケーションに最適な機器構成を自在に選定できます。さらに、各アクチュエータ間の高精度な同期制御で高精度な加工が実現します。
*2.Power PMACとサーボアンプを通信するための当社独自の通信方式です。
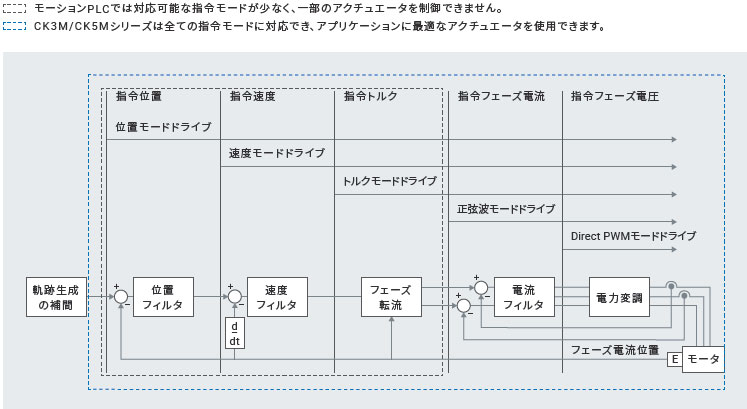
多様な制御モードで最適な機器構成が可能
ハードウェアだけでなくソフトウェアの構造も、位置、速度、トルク、正弦波、およびDirect PWMモードなど、モータを制御するための多くのモードをサポートしています。お客様のアプリケーションに最適な制御モードで、高速高精度な制御を実現します。
【Capable】高い開発自由度でさまざまなアプリケーションを実現
高い開発自由度を持つPMACのアーキテクチャを内蔵しており、自由度の高いソフトウェア構造でお客様独自のアルゴリズムを簡単に組込み、実現が困難なアプリケーションも簡単に実現します。
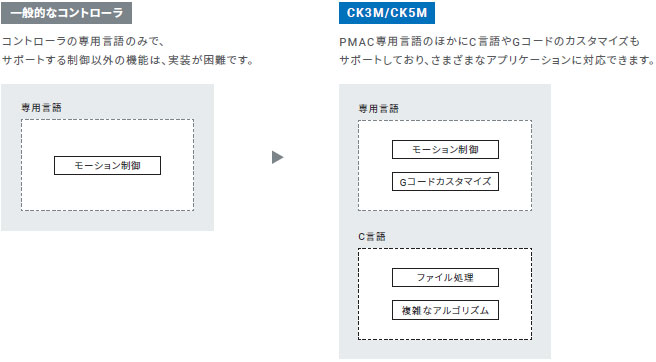
多様なプログラミング言語でさまざまなアプリケーションを実現
CK3M/CK5MシリーズではPMAC専用スクリプト言語で、お客様独自の複雑・高度なアルゴリズムのプログラミングが可能です。また、C言語もサポートしており非常に複雑なアルゴリズムやコントローラ内でのログファイル処理など、一般的なコントローラで実装困難な機能も簡単に実装可能です。さらに、サブルーチンを定義することで標準Gコードのカスタマイズだけでなく、お客様の独自機能を持ったGコードの実装も可能です。
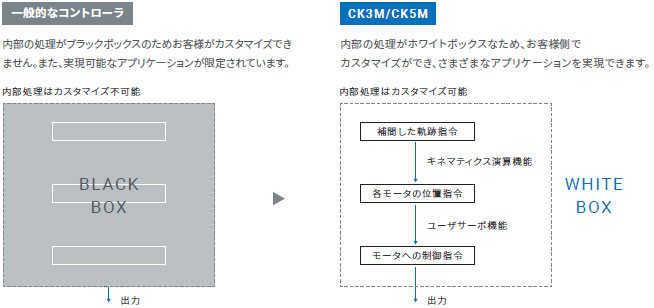
オープンなソフトウェア構造でさまざまなアプリケーションを実現
加工データの座標系とアクチュエータの機械座標系との関係をカスタマイズすることで、ロボット機構やオンザフライレーザ加工などの複雑なアクチュエータ機構を必要とするアプリケーションも、簡単に実装できます。
【Easy】システム統合で装置の設計工数を削減
EtherCAT®I/F、EtherNet/IP™、OPC UAサーバ、MQTT通信機能を搭載。周辺機器を含めて1コントローラで制御しプログラミングや通信のセットアップが1ツールに統一できるため、装置設計の工数を削減できます。
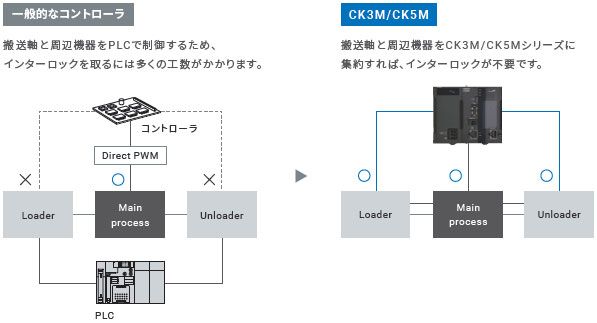
インターロックが不要で設計工数を削減
EtherCAT I/F、EtherNet/IP機能を搭載し、加工アクチュエータだけでなく、搬送軸、周辺機器を含めて1台のコントローラに集約するためインターロックが不要になり、装置設計にかかる時間が削減できます。
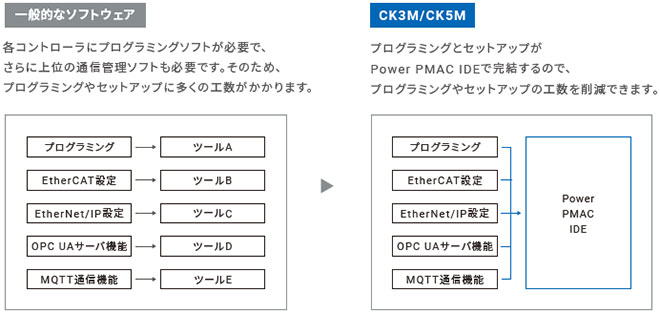
ツールの統合で簡単セットアップ
プログラミングや通信のセットアップをソフトウェア統合開発環境(Power PMAC IDE)に集約しているため、設計時間のさらなる削減が可能です。
注. OPC UAサーバ、MQTT通信機能は、ファームウェアレビジョン 2.8.1以降で対応。