SRP/CSの設計
目標とするPLrを達成するための具体的な機器構成を安全機能ごとに決定し、SRP/CSを設計します。
カテゴリの選択
安全機能ごとに使用する機器を選定するために、サブシステムのアーキテクチャ(カテゴリ)を選択します。
SF1およびSF2のPLr=d、SF3のPLr=cをそれぞれ達成するために、ここではSF1~SF3を構成するサブシステムのカテゴリをいずれも3とします。
カテゴリ3の主な要件
- 単一のフォールトが生じても安全機能を損なわない
- 合理的に実施可能な場合には単一のフォールトは安全機能の次の作動要求時かそれ以前に検出される
システム構成とブロック図
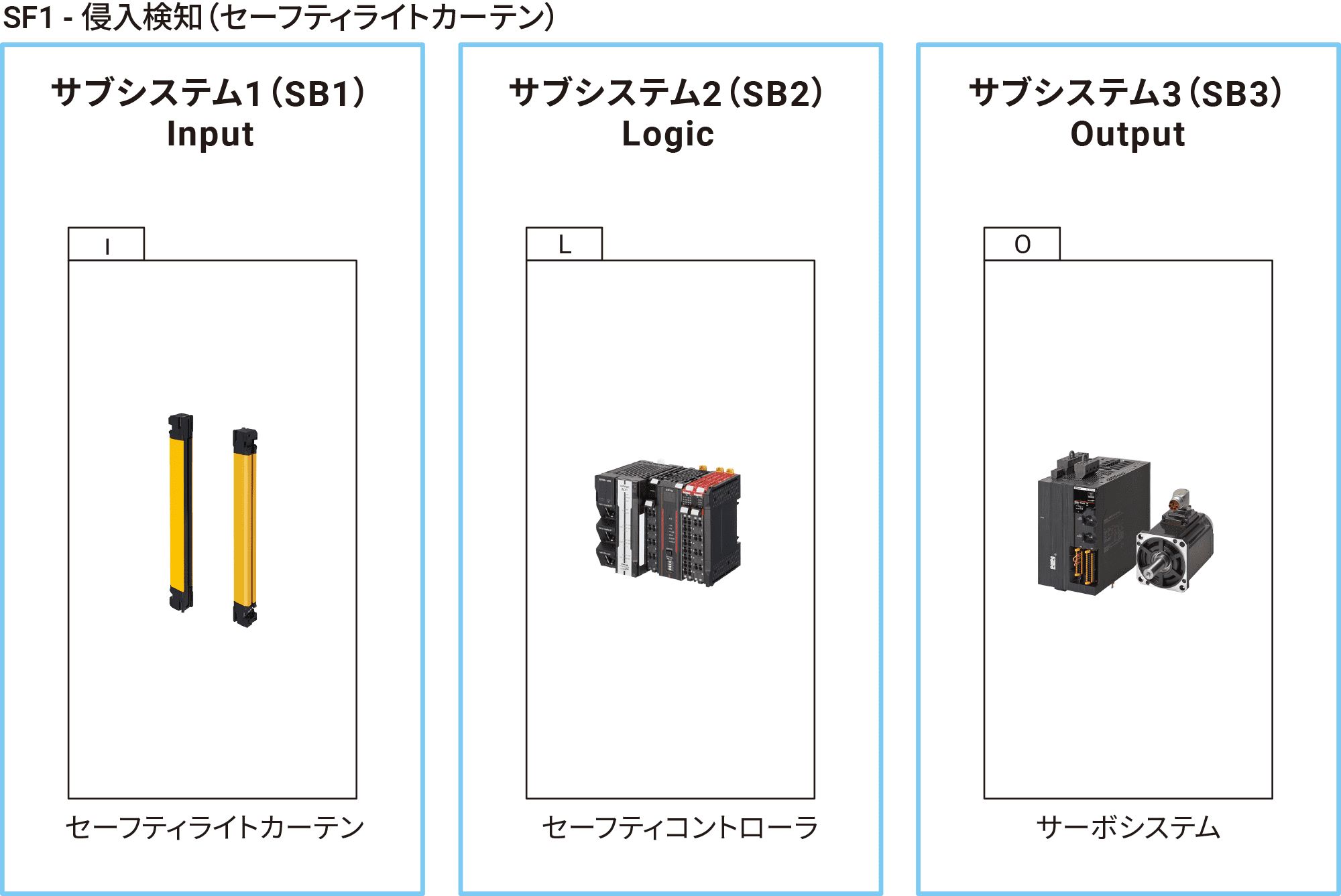
それぞれの安全機能を、「入力(I)」「論理(L)」「出力(O)」の3つのサブシステムで構成します。各サブシステムに用いる機器は、選択したカテゴリをもとに選定します。
SF1 - 侵入検知(セーフティライトカーテン)
【サブシステム1:入力(I)】
| 機器 | オムロン F3SG-4SRA0240-14 |
|---|---|
| 分類 | Type 4 AOPD(IEC 61496-1) |
| 概要 | 指検出用途、検出幅240mm, 最小検出物体直径φ14mm |
| サブシステムの安全性能 | PL e、カテゴリ4相当 |
| 接続 | 2出力(OSSD)をセーフティコントローラへ入力 |
【サブシステム2:論理(L)】
| 機器 | オムロン セーフティコントローラ NX-SL |
|---|---|
| 構成* | セーフティCPUユニット(NX-SL5500)+セーフティ入力ユニット(NX-SIH400) |
| 分類 | セーフティコントローラ |
| 概要 | 事前評価済の安全ファンクションブロックを組み合わせて安全ロジックを構築 |
| サブシステムの安全性能 | PL e、カテゴリ4 |
| 接続 | 入力機器との接続はセーフティ入力ユニット、出力機器との接続はSafety over EtherCAT(FSoE) |
* 入力機器・出力機器それぞれとの接続仕様に適したI/Oユニットを使用して論理サブシステムを構成してください。この事例では、出力機器との接続にFSoEを用いるため、セーフティ出力ユニットは使用していません。
【サブシステム3:出力(O)】
| 機器 | オムロン ACサーボシステム 1Sシリーズ 安全機能対応 |
|---|---|
| 構成 | ACサーボドライバ(R88D-1SAN02H-ECT)3台 |
| 分類 | モーションセーフティ機能付きACサーボシステム |
| 概要 | SIL3/PL eに適合したセーフティ機能(STO、SS1、SS2、SOS、SLS、SLP、SDI、SBC)を搭載 |
| サブシステムの安全性能 | PL e、カテゴリ3相当(SS1/STO) |
| 接続 | Safety over EtherCAT(FSoE) |
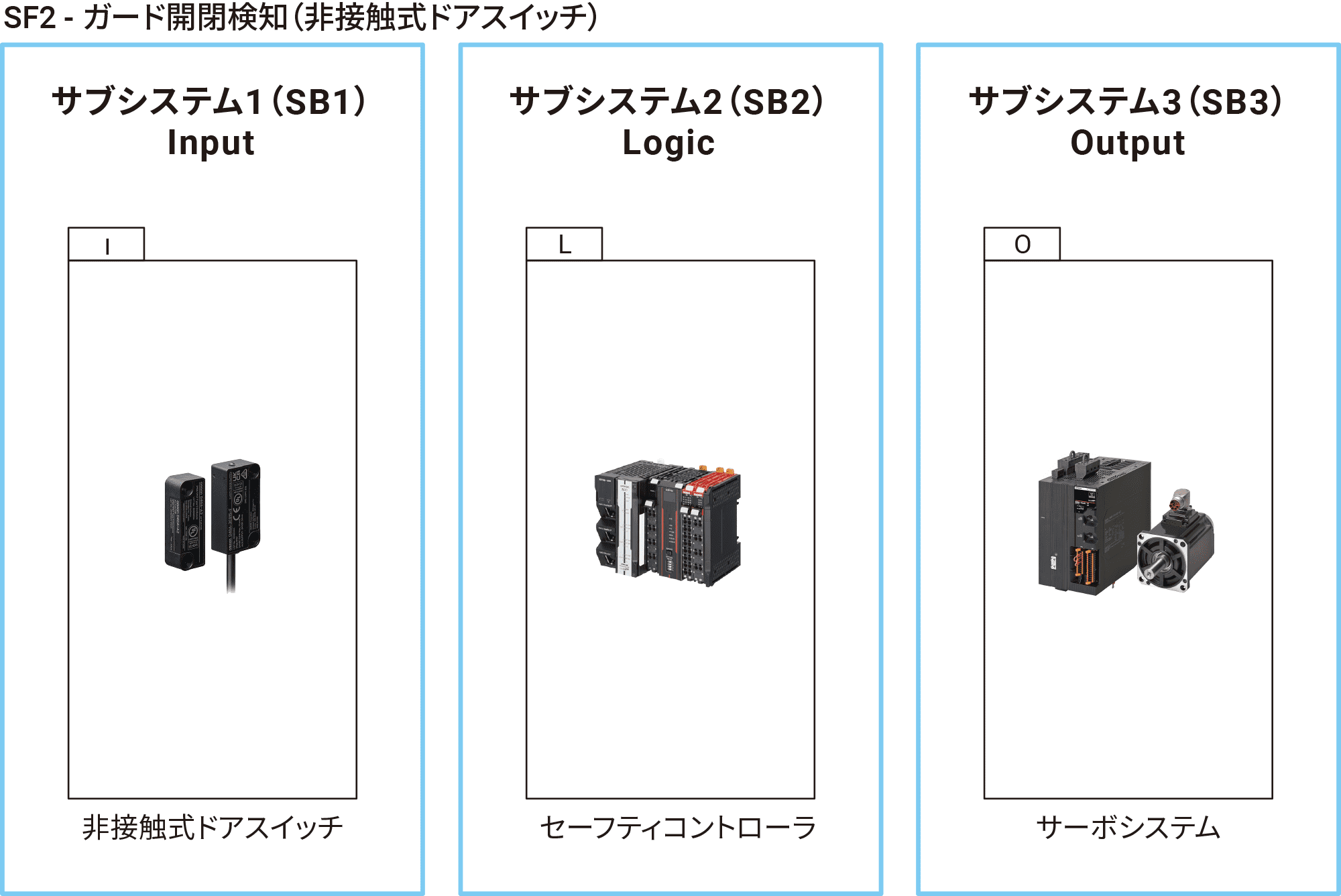
SF2 - ガード開閉検知(非接触式ドアスイッチ)
【サブシステム1:入力(I)】
| 機器 | オムロン D40A-2C2 |
|---|---|
| 分類 | ISO 14119 Type 4インターロック機器 |
| 概要 | コード化された専用アクチュエータのみで作動 |
| サブシステムの安全性能 | PL e、カテゴリ4相当(セーフティコントローラとの組み合わせ) |
| 接続 | セーフティドアスイッチ入力・出力をセーフティコントローラに接続 |
【サブシステム2:論理(L)】
SF1と同じ
【サブシステム3:出力(O)】
SF1と同じ
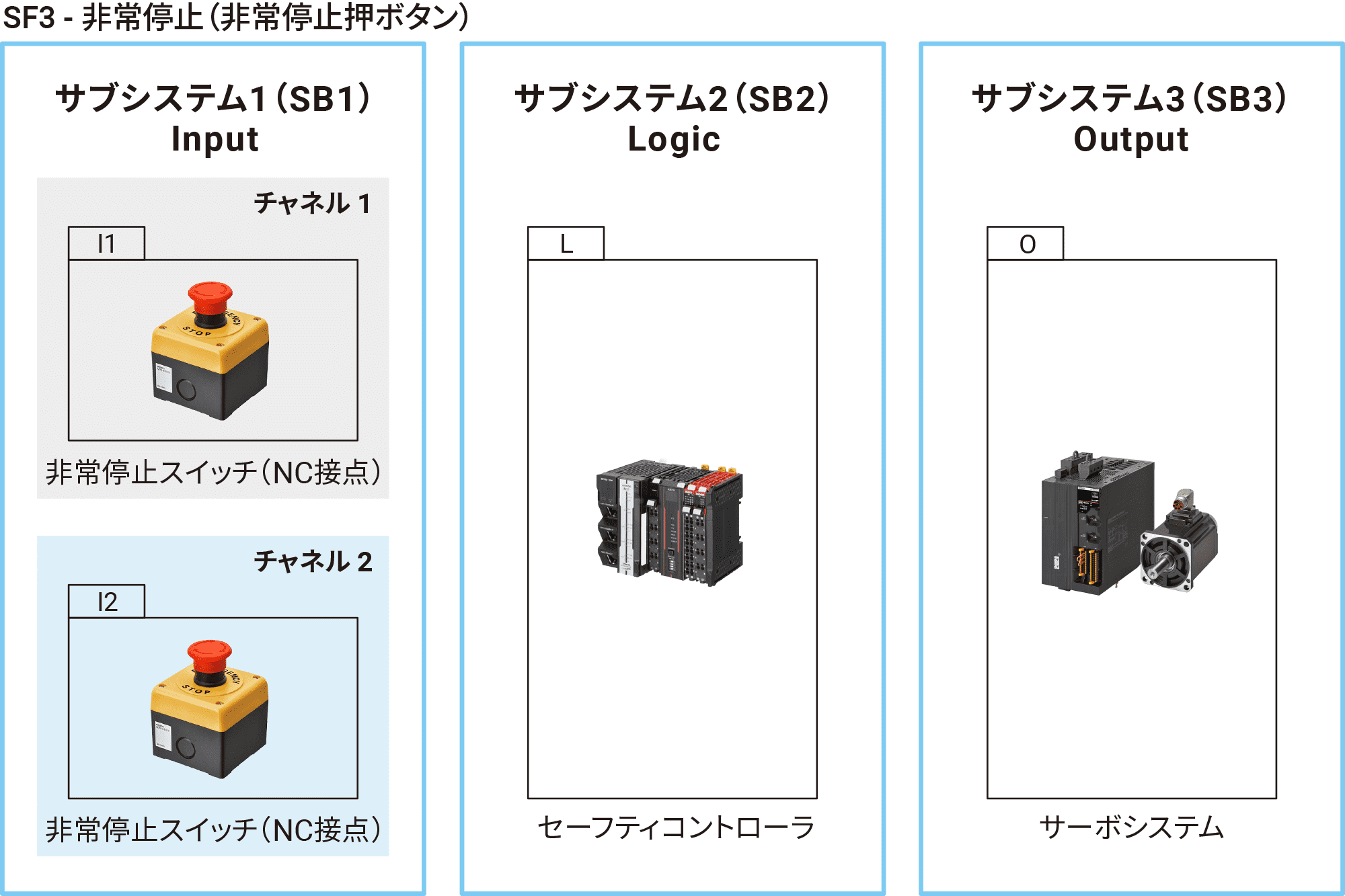
SF3 - 非常停止(非常停止押ボタン)
【サブシステム1:入力(I)】
| 機器 | オムロン A22NE-M-P202-N-B |
|---|---|
| 分類 | IEC 60947-5-1/IEC 60947-5-5に適合する非常停止用押しボタンスイッチ |
| 概要 | 2接点(2NC) |
| サブシステムの安全性能 | カテゴリ3または4の構成が可能 |
| 接続 | 2接点をセーフティコントローラへ入力 |
【サブシステム2:論理(L)】
SF1と同じ
【サブシステム3:出力(O)】
SF1と同じ
SF1~SF3に共通して用いる出力(O)のサブシステム3を構成するサーボシステムは、使用する3軸のサーボモータのすべてが停止しなければ危険源は除去されないことを前提としています。この場合、すべてのサーボシステムを直列構成とみなす(1つの故障が安全機能の喪失につながる)ことから、3台をまとめて1つのサブシステムとして評価します。
もし3軸のそれぞれが独立した危険源に対応する場合は、各軸を独立したサブシステムとして個別に評価する必要があります。
実際のアプリケーションでは、機械の構造と危険源との関係を基に、サブシステムの構成を検討してください。