
キヤノン社 ビジョンシステム
Vision Edition-T
協調ロボットの活用範囲を拡大
TMシリーズ専用ビジョン
Vision Edition-Tはオムロンの協調ロボット TM シリーズ 専用モデルです。
ネットワークカメラのPTZ機能を活用して広範囲に対して画像処理を行い、その結果をロボットに伝えることができます。
特長
パン/チルト/ズーム(PTZ) 機能、オート機能を活用して
広範囲に対して画像処理を行い 、ロボットが行う作業の幅を拡大
- LANケーブル1本で通電・給電(PoE対応)
通常のEthernetケーブルにより通電・給電を行います。ケーブルの敷設が容易です。 - カメラ位置を自在にコントロール
パン(横回転)、チルト(縦回転)で任意の撮影位置へ移動可能。
機種によっては360度無限回転も可能です。 - 光学20倍×デジタル20倍=400倍ズーム※
光学ズーム、デジタルズーム機能により離れた対象物を捉えます。 - オートフォーカス/マニュアルフォーカス
撮影対象の距離が変わってもオートフォーカスで撮影できます。
オートフォーカス、ワンショットオートフォーカス、マニュアルフォーカスを使い分けることが可能です。 - 露光やホワイトバランスも調整可能
専用照明がない環境でも露光、シャッタースピード、ホワイトバランスの調整で最適な画質で撮影が可能です。
オート調整機能によりワンタッチで設定が完了します。 - 動画録画、リモート監視
リモートで映像確認や動画録画も可能です。
静止画による画像処理をしながら動画を残し、トレーサビリティやトラブル解析にも応用可能です。
※:最大ズーム倍率は、接続カメラにより異なります
性能一覧
| 型名 | Vision Edition-T | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 対応ロボット | オムロン 協調ロボットTMシリーズ(ロボット通信方式:Modbus TCPに通信) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 対応カメラ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 対応IPC | NYBシリーズ 対応OS Windows10 IoT Enterprise 2016 LTSB (64bit) Windows10 IoT Enterprise 2019 LTSC (64bit) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| カメラ同時接続台数 | 1フローチャートあたり最大4台 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| カメラユニット | 撮像、ネットワークカメラポジション、ネットワークカメラ移動先補正、グリッドPTZ | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 分岐処理ユニット | 条件分岐、複数条件分岐 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 画像処理ユニット | 濃淡検査、エリア、エッジ位置、エッジ幅、部分円環エッジ、近似直線エッジ、角度検出、円検出、楕円検出、ブロブ検出、1Dコードリーダー、2Dコードリーダー、数字認識、文字認識、アナログメーター読み取り、色判別、円環文字認識、7セグ数字認識 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| モデルマッチングユニット | NCCマッチング、形状マッチング | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 演算ユニット | 四則演算、角度演算、複数条件分岐演算、最大値/最小値、数式演算、出力値統計、2直線の交点、2点間の計算 |
※:仕様は予告なく変更になる場合があります。
※:Vision EditionはIPCにインストールした状態で販売されています。
※:製品の詳細はキヤノン社へお問合せください。
使用用途例
・マシンテンディング
部品加工工程でのプレス機、加工機、CNC、成型機などの自動機への部品投入、取り出し作業を協調ロボットにより自動化する場合、ロボットに搭載しているカメラではアームが届かず撮影できない場合がありますが、ネットワークカメラにより撮影範囲が広がります。また自動機のモニタ上の情報読み取りなど自動化の範囲が拡大。
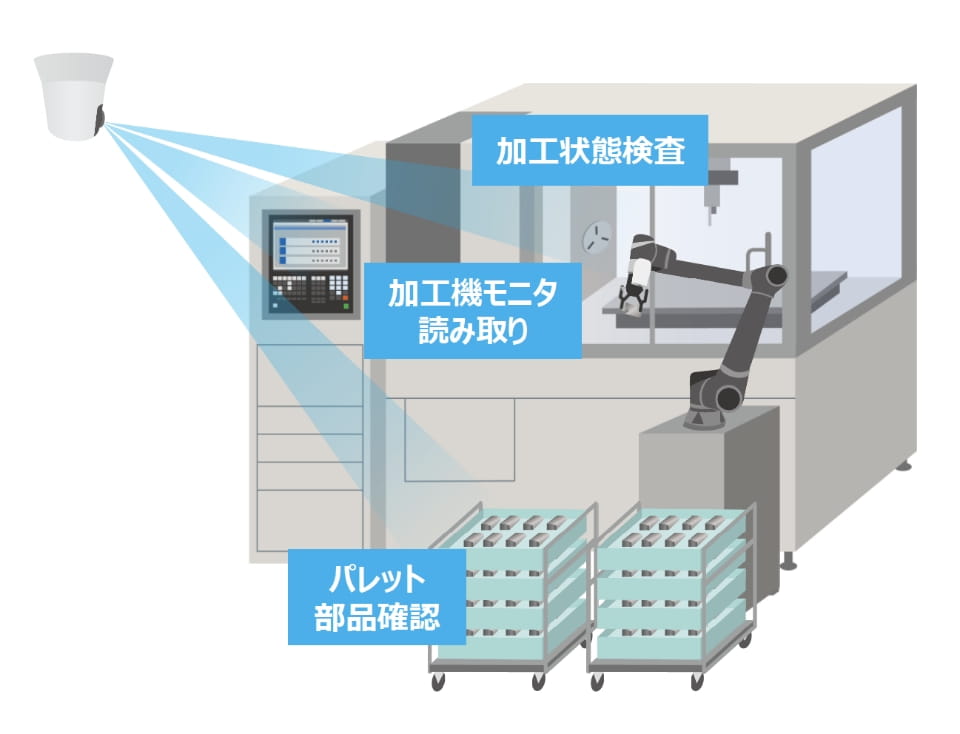
ロボットアームが届かない位置を撮影できるようになり
マシンテンディングの活用の幅が広がります
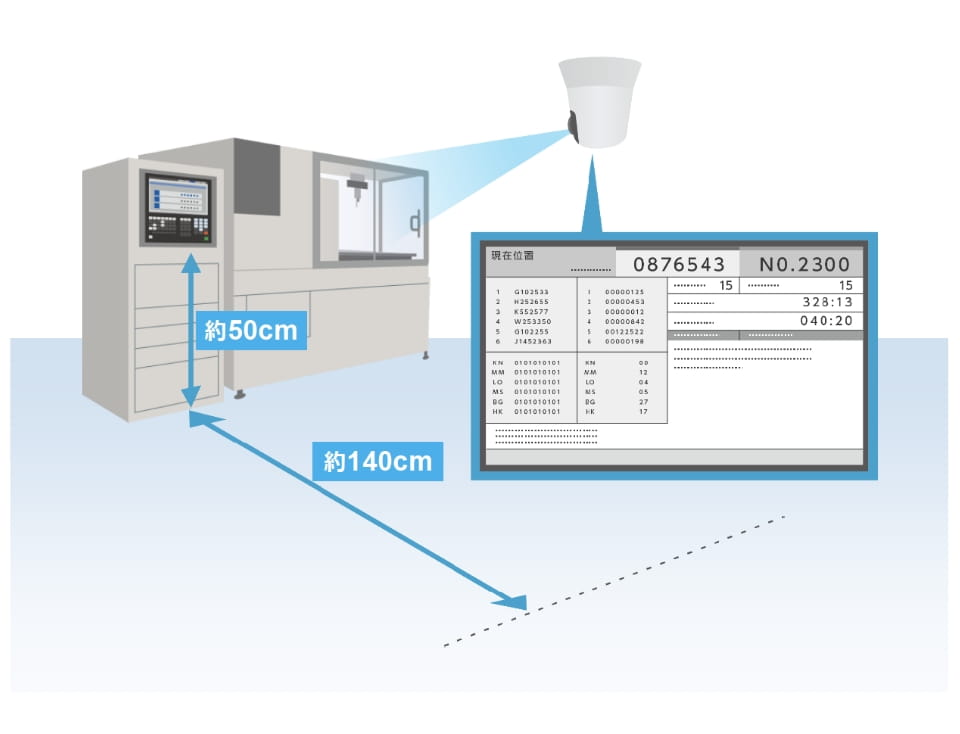
金型加工機のモニタリング検証の様子
モニター上の細かい数字や文字を読み取れます
・パレタイジング
製品出荷工程での梱包箱をパレットへの積載作業を協調ロボットにより自動化する場合、梱包箱の検出、積載物の出荷管理が必要な場合がありますが、ネットワークカメラにより梱包箱の到着検出や積載物の個数、バーコード読み取りによる出荷管理などの自動化の範囲が拡大。
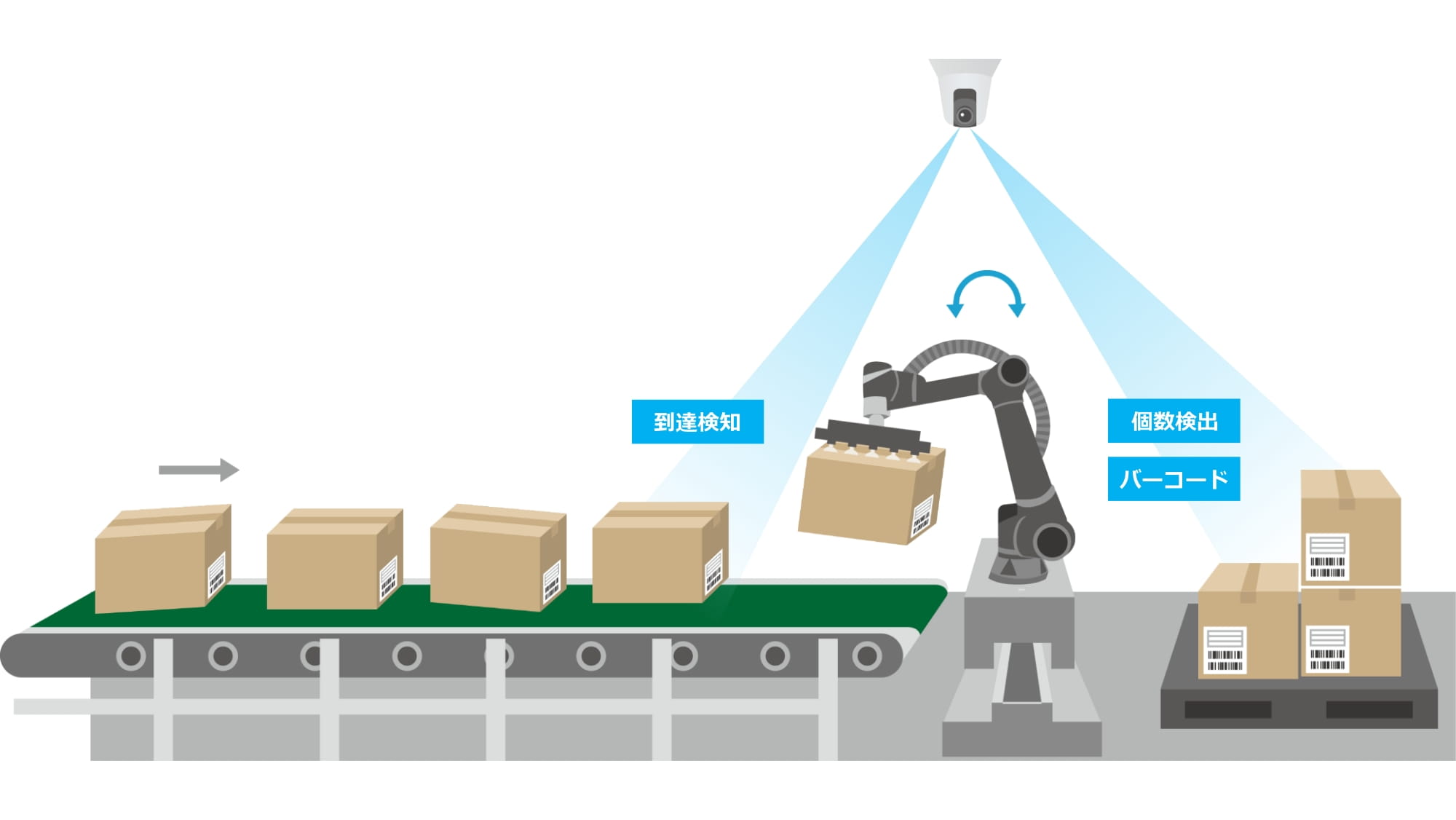
パレタイジング作業と並行して、箱積み状況やバーコード読み取り、到着検知や有無検査のセンサーをカメラで代替します
システム構成

形式

形式:Vision Edition-T
協調ロボットTMシリーズ専用モデル
