オンライン・オプションセミナ INDEX
モバイルロボット LDシリーズ

おことわり
(1)本書の内容の一部または全部を無断で転載、複製することは禁止されています。
(2)本書の内容に関しては、改良のため予告なしに仕様などを変更することがありますのでご了承ください。
本書に記載の回路構成、結線方法、プログラム等は、一般的な代表例です。
ご採用に関しては、構成する商品の取扱説明書あるいはマニュアルをお読みいただき、ご了承事項、仕様、性能、安全性についてご確認をお願いいたします。
なお、製品取り扱い上の安全に関する事項は、全てユーザーズマニュアルを優先お願いいたします。
解説動画
2-1-2章
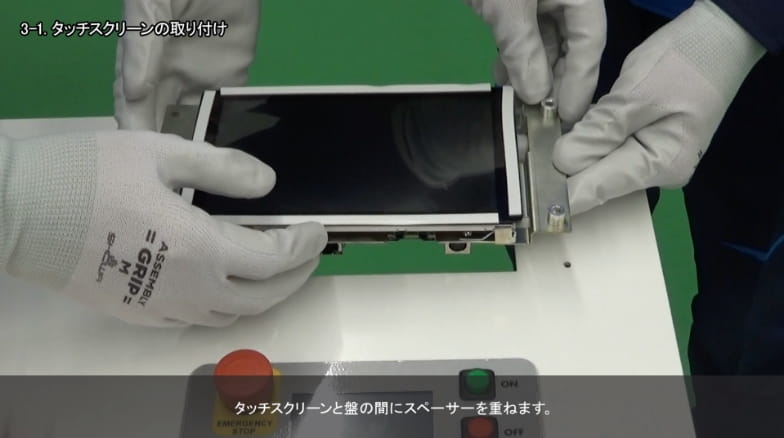
タッチスクリーン取り付け
この動画では、タッチスクリーンのオプション構成品の確認、必要工具の確認と取り付けについて説明します。
2-2章
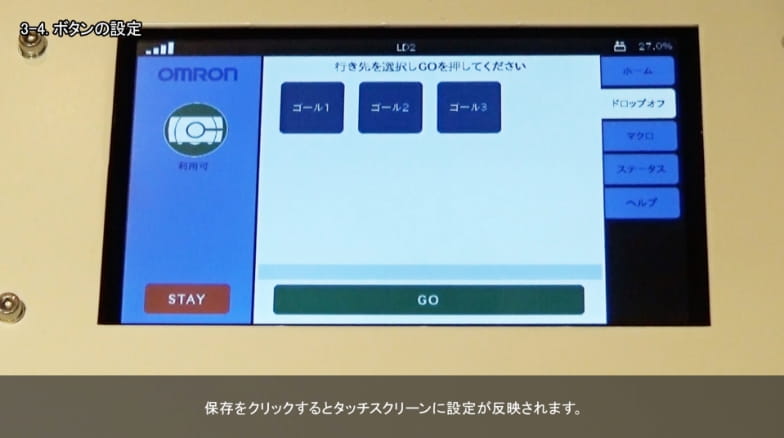
タッチスクリーンの設定①
この動画では、タッチスクリーンの電源の設定、DHCPの設定、ドロップオフモードの設定について説明します。
2-3-2章
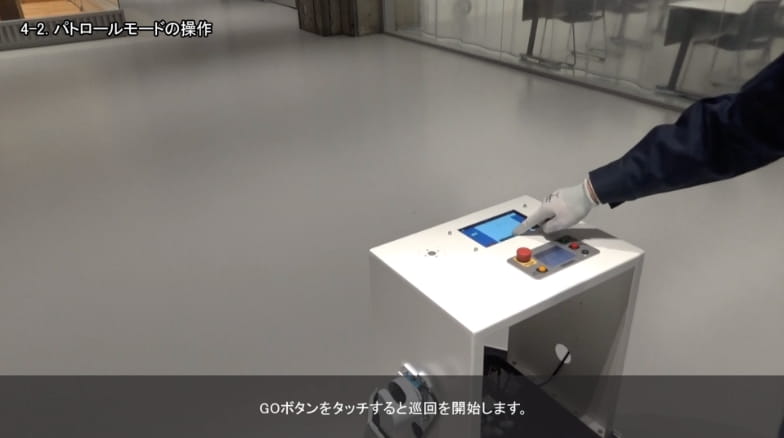
タッチスクリーンの設定②
この動画では、タッチスクリーンのパトロールモードの設定、自己位置推定の設定について説明します。

3-2章
HAPSの取り付け
この動画では、高精度位置決めシステム(High Accuracy Positioning System)の取り付けについて説明します。

3-4章
HAPS設定①
この動画では、HAPSの磁気テープの貼り付け、HAPSの有効化、FollowGuideの設定とマップの編集について説明します。
3-4章
HAPS設定②
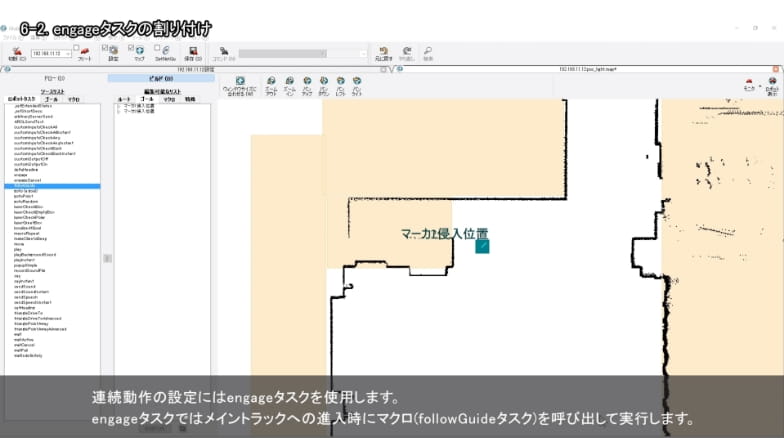
この動画では、HAPSの走行テストと連続したマーカへ移動する設定について説明します。

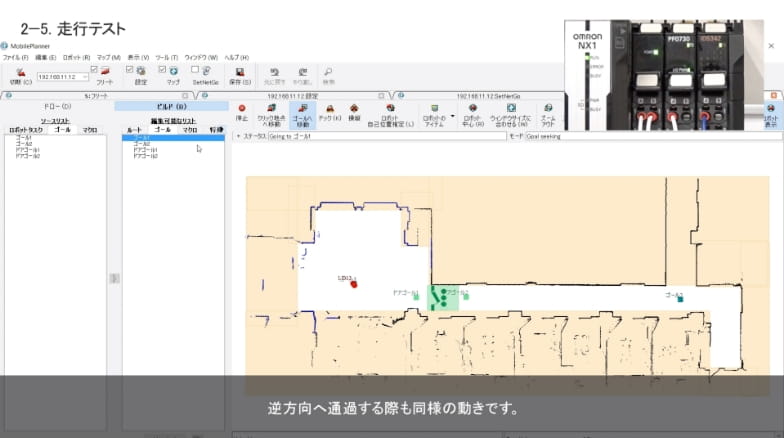
3-4章
HAPS設定③
この動画では、HAPSの走行テスト(engageタスク設定後)について説明します。

4-2章
コール/ドアボックスの取り付け
この動画では、コール/ドアボックス取り付けについて説明します。

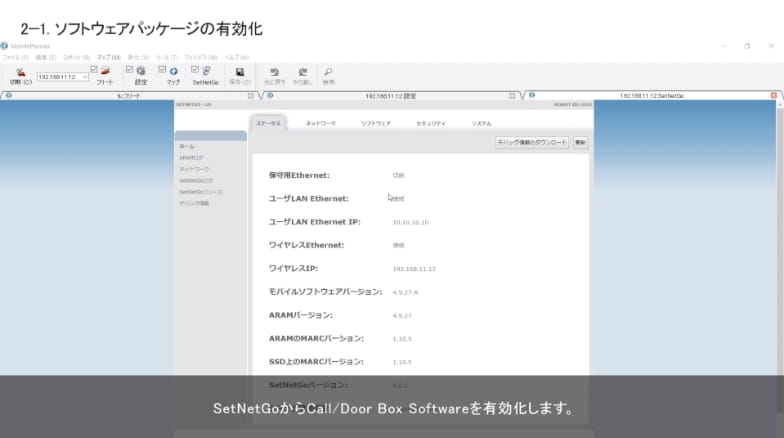
4-3-4章
コール/ドアボックスの設定①
この動画では、コール/ドアボックスのネットワーク設定について説明します。
4-4章
コール/ドアボックスの設定②
この動画では、コール/ドアボックスでのLDの設定について説明します。

4-5章
コール/ドアボックスの操作①
この動画では、コール/ドアボックスのコールボタンの操作とドアボックスの操作について説明します。
4-5章
コール/ドアボックスの操作②
この動画では、コール/ドアボックスのコールボタンの操作とドアボックスの操作について説明します。

5-5章
カートトランスポータの操作①
この動画では、カートトランスポータのカートのラッチ・アンラッチの手動操作と自立走行時のカートのラッチ・アンラッチについて説明します。
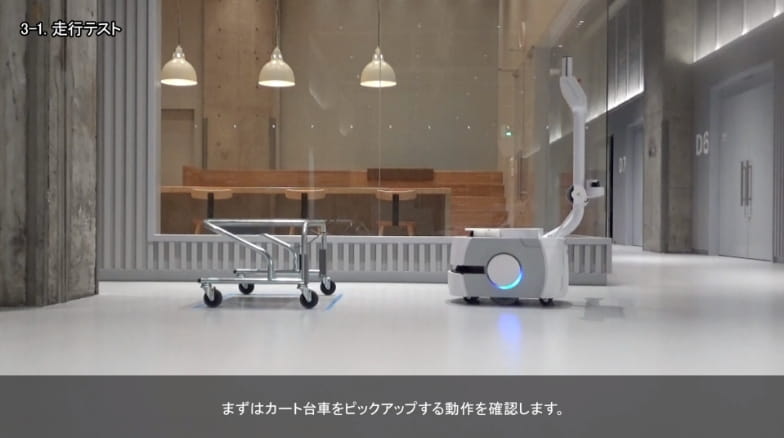
5-5章
カートトランスポータの操作②
この動画では、カートトランスポータの走行テストについて説明します。

6-2章
Acuity Localizationの取り付け
この動画では、Acuity Localizationのオプション構成品の確認、必要工具の確認と取り付けについて説明します。
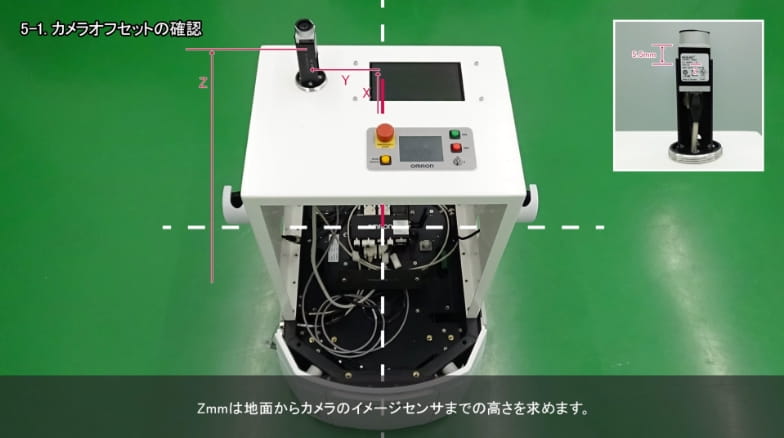
6-3章
Acuity Localizationの設定
この動画では、Acuity Localizationのソフトウェアパッケージのインストール、DHCPの設定、Acuity Localizationの有効化、カメラキャリブレーションファイルのインポート、カメラオフセットの設定とカメラ映像の確認について説明します。
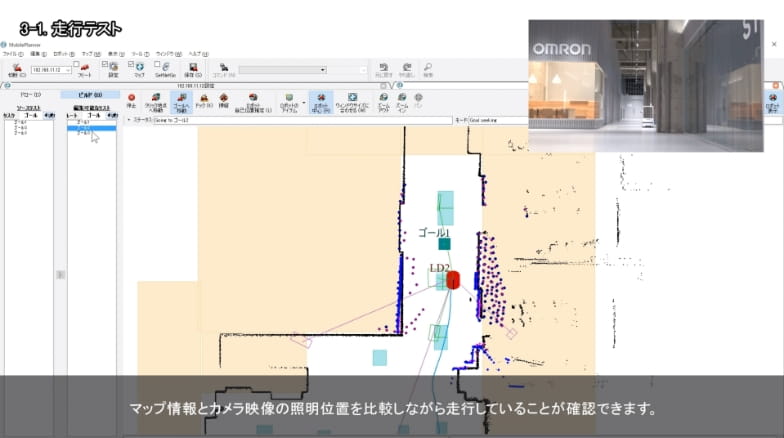
6-4章
Acuity Localizationのマップ作成
この動画では、Acuity Localizationのマッピングの準備、マッピング、走行テストについて説明します。
お客様へ:安全に関しては、必ずマニュアルおよびハードウエア設置マニュアルを参照してください。