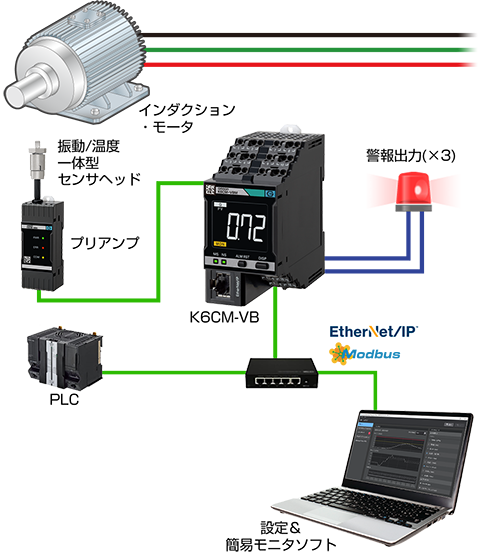
接続例(振動・温度タイプ)
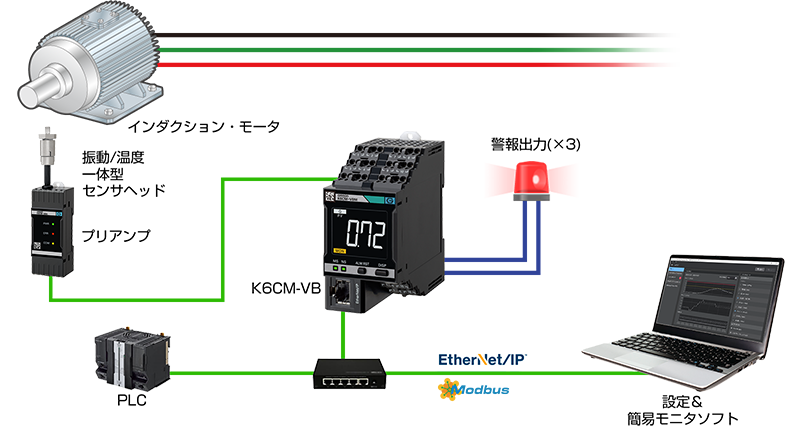
注. センサヘッドとプリアンプ間は、専用ケーブルで2.9mです。延長することはできません。
注. センサヘッドとプリアンプはセットで、出荷時に校正と検査をしています。必ず、出荷時の組み合わせでお使いください。
ベアリング異常を早期に見つけたい
注. センサヘッドとプリアンプ間は、専用ケーブルで2.9mです。延長することはできません。
注. センサヘッドとプリアンプはセットで、出荷時に校正と検査をしています。必ず、出荷時の組み合わせでお使いください。
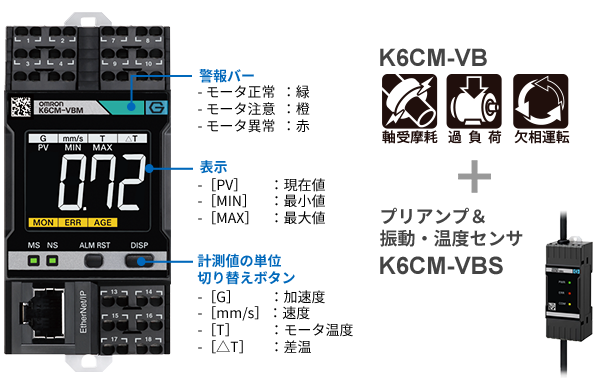
加速度、速度、モータ温度、差温によりモータの異常を検知します。
注. 差温はセンサヘッドの温度と、プリアンプ周辺の温度差を計測しており、モータ表面温度と周囲温度の差を表します。
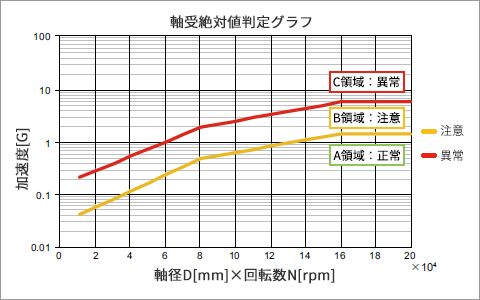
モータのベアリングに異常があると加速度の数値が上昇します。
絶対値判定
絶対値による監視は、モータの状態が不明な場合に行います。
監視対象のモータ軸経D(mm)と回転速度N(rpm)からしきい値が決まります。
相対値判定(傾向監視)
初期測定値がA領域の場合は、その数値を元値とし、その3倍を超えたら注意、5倍を超えたら異常として判定します。
速度はモータ軸の振動で上昇します。
絶対値判定
初期測定値を左のグラフに照らし良否のしきい値を設定します。
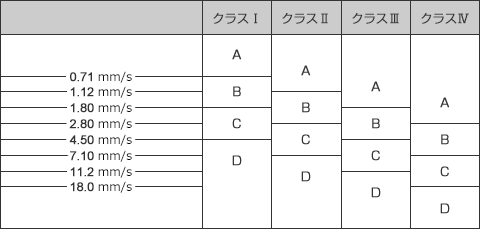
対象モータのクラスは、下表にしたがいます。
| 機器クラス | 定義 |
|---|---|
| クラスⅠ | 小型機械 (代表例:出力15kW以下のモータ) |
| クラスⅡ | 中型機械 (代表例:出力15kW ~ 75kW以下の モータおよび300kW以下の機械) |
| クラスⅢ | 大型機械: 高い剛性をもつ重い基礎上に 据え付けられたもの |
| クラスⅣ | 大型機械: 柔らかい剛性をもつ基礎上に 据え付けられたもの |
相対値判定(傾向監視)
初期測定値がAもしくはB領域の場合は、その数値を元値とし、その3倍を超えたら注意、5倍を超えたら異常として判定します。
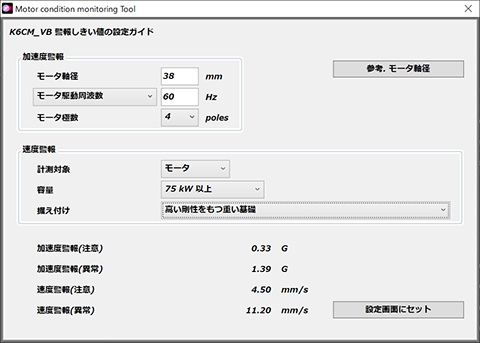
監視対象のモータ情報を専用ツールに入力することで、加速度と速度の警報しきい値(絶対値判定)を自動で設定することができます。
モータ温度はモータ表面の温度を測定します。モータの仕様にあわせてしきい値を決めます。
差温はモータ表面と周囲温度との差。モータ異常による温度上昇を検知します。
商品のさらに詳しい情報、マニュアルやCADデータのダウンロードもできます。
モータ状態監視機器
K6CM

実際のお客様での導入事例と
改善効果を
ご紹介しています。



