
コンティニュアンスアライメント(アライメント・軌跡制御モデル)
連続的にワーク位置を検出し、目標位置までの移動距離を逐次更新することで、ワークを停止させずに高精度な位置決めを行います。従来のアライメント制御から位置決め時間を平均20%短縮が可能です。
【公開日】2015/06/22
【時間】1:33
この動画の関連情報





あわせて見たい動画
アライメント・軌跡制御モデル
理想軌跡と計測軌跡からオフセット補正とフィードフォワードによる補正。 高速動作時の軌跡逸脱を考慮した2種類の位置指令により、軌跡制御の高精度化を実現し...

制振制御 ワーク搬送時のずれ(ガラス板)
搬送されたガラス板の停止位置のずれにご注目!振動抑制ファンクションブロックにより、動作時に発生する振動を抑制しながら高速搬送を実現します。

パラレルリンクロボットでのワーク搬送制御
汎用コントローラによるパラレルリンクロボット制御で賢く柔軟な搬送システムを実現します。Sysmacは画像処理・パラレルリンクの座標演算・サーボモータを高速高...
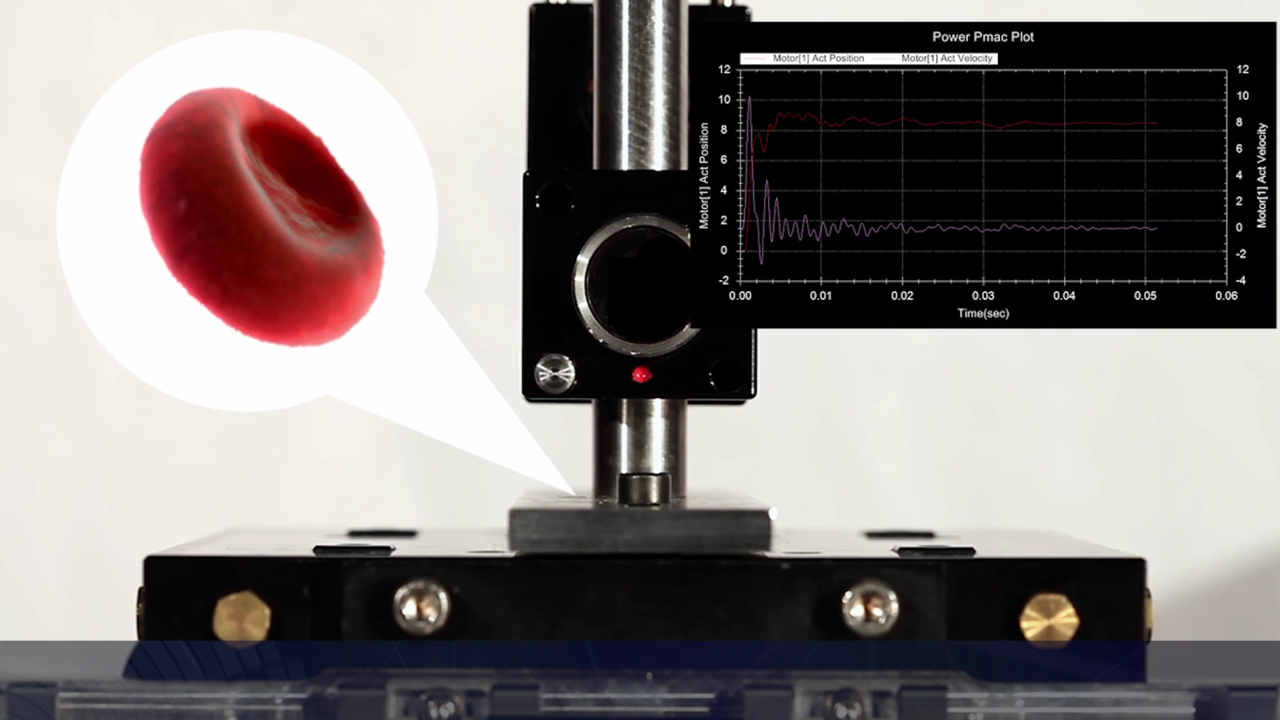
PMACアプリ紹介1 超精密ステージ制御
超精密ステージの実現には、ステージ位置情報をできる限り細かく検出しフィードバックする制御系を構築する必要があります。PMACには超高分解能リニアスケールか...
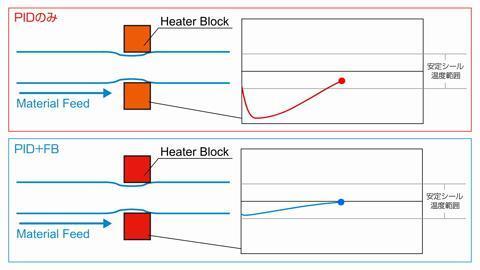
温度制御ライブラリ(直接操作量制御編)
包装の開始停止時におこるシール温度変化を抑制し、包材消費や温度安定待ちなどの無駄を削減します。

テンション制御(テープ巻き取り装置)
巻き取り装置は「早く」「きれいに」巻き取ることを要求されます。「テンション・蛇行抑制・高速化」の重要3要素をオムロンのマシンオートメーションコントローラ...