


- Sysmac入門
モーション制御編
NX1Pと1Sサーボでモーション制御が簡単に
マシンオートメーションコントローラNX1Pは、EtherCATポートを内蔵し、高機能モーション制御で、装置の高速・高精度化を実現
・単軸位置制御も含め最大8軸のサーボシステムをEtherCATで簡単に配線できます。
・最大4軸のモーション制御、電子カム機能や、補間機能により装置の高速・高精度化を実現します。
配線作業が簡単
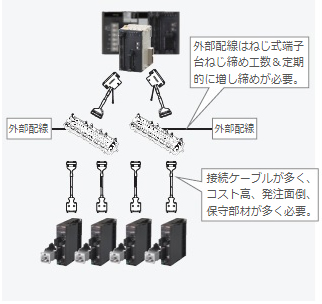
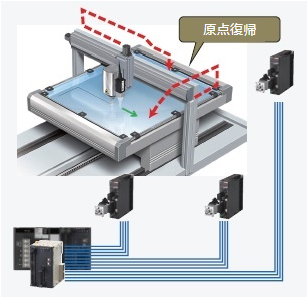
従来の位置制御ユニットでは
配線作業に時間がかかる。また配線間違いがあると確認に時間がかかっていました。
外部配線はねじ式端子台ねじ締め工数&定期的に増し締めが必要。
外部配線
外部配線
接続ケーブルが多く、コスト高、発注面倒、保守部材が多く必要。
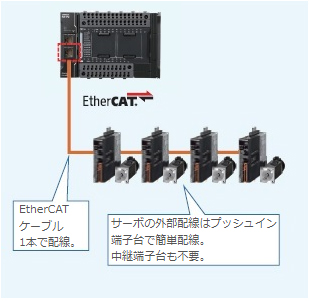
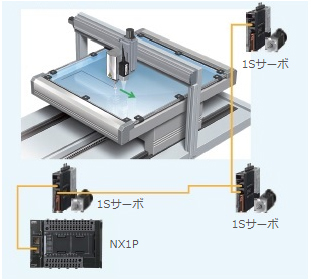
NX1Pコントローラ+1Sサーボの組み合わせなら
ケーブル1本なので配線を間違えることなく簡単接続できます!
EtherCAT
ケーブル
1本で配線。
サーボの外部配線はプッシュイン
端子台で簡単配線。
中継端子台も不要。
モーションプログラムが簡単
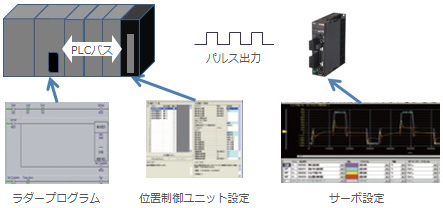
従来の位置制御ユニットでは
位置決めを行うには3つのソフトウェアが必要でした。入出力全体を制御するラダープログラミングツール、位置制御ユニット設定用のモーションプログラミング・ソフトウェア、サーボ側の設定ソフトウェア、それぞれのツール/ソフトウェアを確認しながら、調整やデバッグする必要があるので、多くの時間がかかりました。
PLCバス
パルス出力
ラダープログラム
位置制御ユニット設定
サーボ設定
NX1Pコントローラ+1Sサーボの組み合わせなら
統合ソフトウェア環境 Sysmac Studioを使うことで、ラダープログラミング + モーション + サーボ設定が1つのソフトウェアできるようになりました。ラダープログラム(またはSTプログラム)の中で位置決め命令を記載するので、従来のような3つのソフトを交互に調整する必要はありません。
Sysmac StudioだけでOK!
サーボON
原点復帰
位置決め
完了後
次の動作
完了後
次の動作
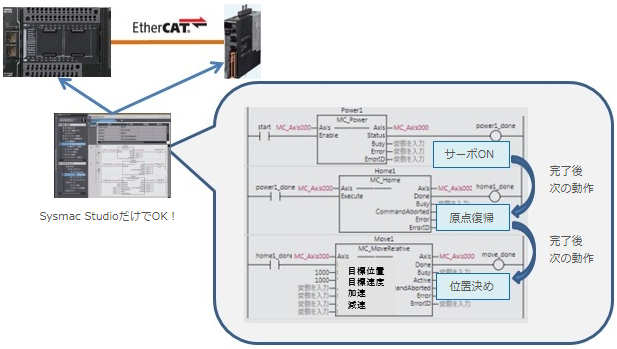
このように、簡単に位置決め制御を実現。モニタ、修正も簡単にできます!さらに、モーション・ファンクションプロックを使って、サーボONや、原点復帰、位置決めなどの動作の流れどおりにプログラムが組めて、他の人からも見やすいプログラムになります。
3次元シミュレーションでデバッグが簡単
従来の位置制御ユニットでは
デバッグには、実機の装置がないと動作の確認ができませんでした。そのため、実際の設計・制作段階に加えて、試運転・調整の期間に多くを費やしていました。また現場での調整・試運転期間に手直しが発生すると、さらに工数が発生していました。

NX1Pコントローラ+1Sサーボの組み合わせなら
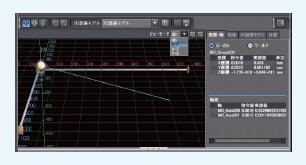
Sysmac Studioに搭載された3次元シミュレーションを使用することにより、プログラムしたサーボモータの軌跡を見ながら、機械担当者と装置の完成前にレビューができ、不具合点を事前に改善できます!
装置を設計する段階で、机上でTry&Errorを繰り返して設計を改善することにより、設計工数の大幅な削減につながり、現場でのデバッグ時間も短縮します。
絶対値エンコーダ標準搭載で停電時の再復旧が速い
従来のインクリメンタルサーボでは
非常停止や電源断時、原点情報がなくなり、原点復帰を実行しないと装置が復旧せず、次の位置決めができませんでした。
原点復帰
NX1Pコントローラ+1Sサーボの組み合わせなら
1Sサーボは、絶対値エンコーダ標準搭載。原点復帰が不要なため、次の位置決めまでの時間が削減できます。さらに、1Sサーボはバッテリレスで絶対位置を保持。メンテナンス工数も削減できます!
1Sサーボ
1Sサーボ
1Sサーボ
NX1P
![]()



 Facebook
Facebook