PMACアプリ紹介2 キネマティクス演算
ロボット動作に必要な運動学演算式(インバース/フォワード・キネマティクス)を実装する領域がお客様に開放されていますので、お客様のメカ機構に合わせた制御を実装可能です。
【公開日】2018/07/02
【時間】1:13
この動画の関連情報



あわせて見たい動画
PMACアプリ紹介3 モーションスペクトル分解
動作指令を複数のアクチュエータ動作にリアルタイムに分解する「モーションスペクトル分解」により、細かな高加減速動作を高応答のアクチュエータに、広範囲の動...
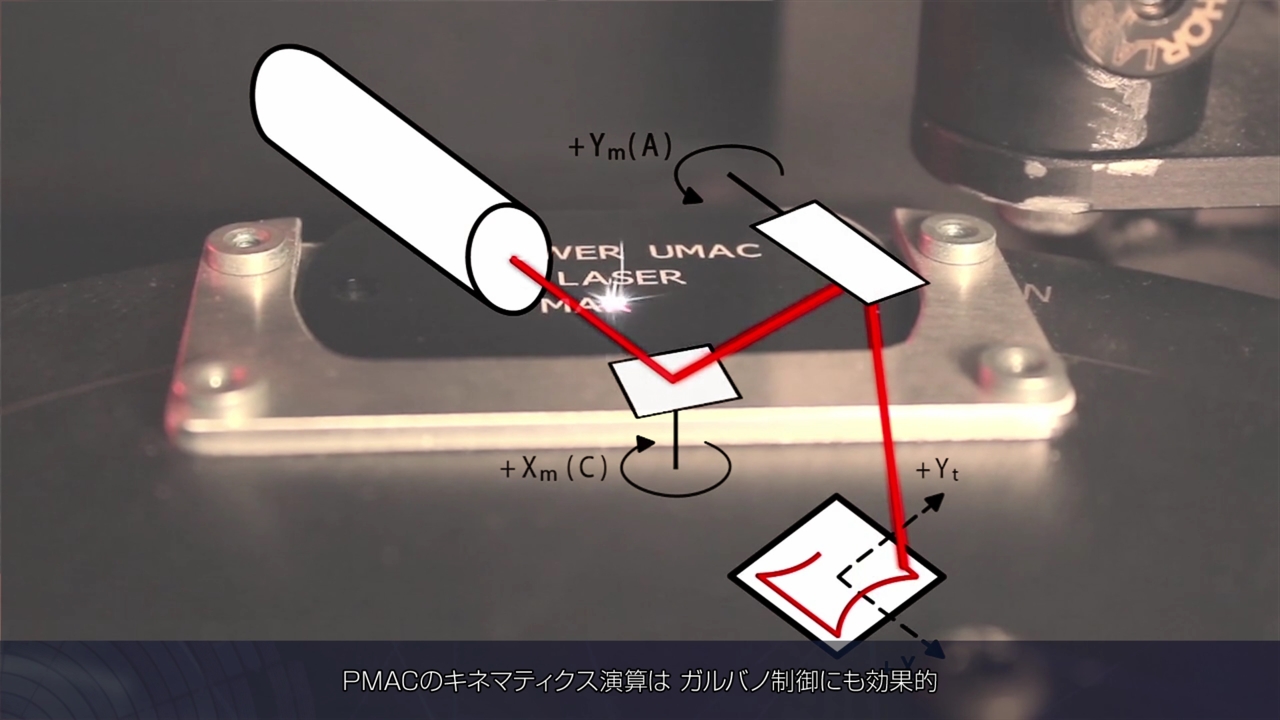
PMACアプリ紹介4 ガルバノスキャナ
PMACはステージ制御に加え、2D/3Dガルバノスキャナの制御を行うことも可能です。Machine Automationは日本の製造業課題を解決するオムロンFAソリューションです...
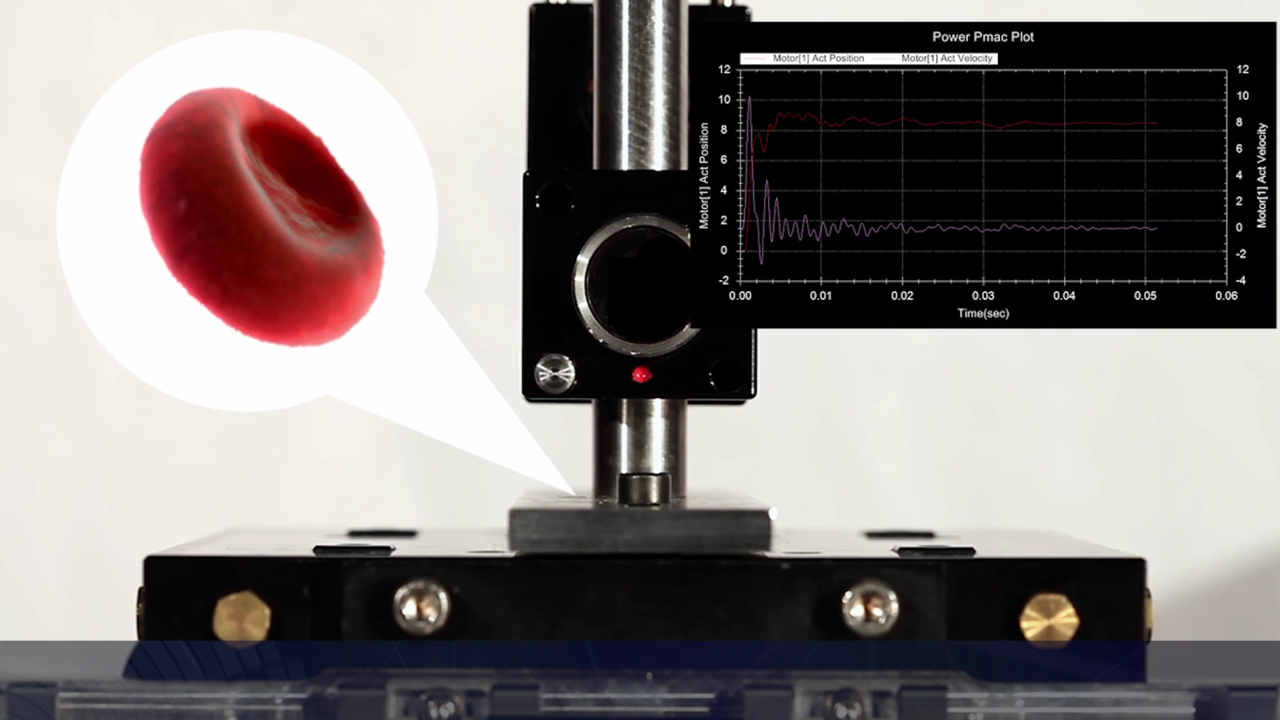
PMACアプリ紹介1 超精密ステージ制御
超精密ステージの実現には、ステージ位置情報をできる限り細かく検出しフィードバックする制御系を構築する必要があります。PMACには超高分解能リニアスケールか...
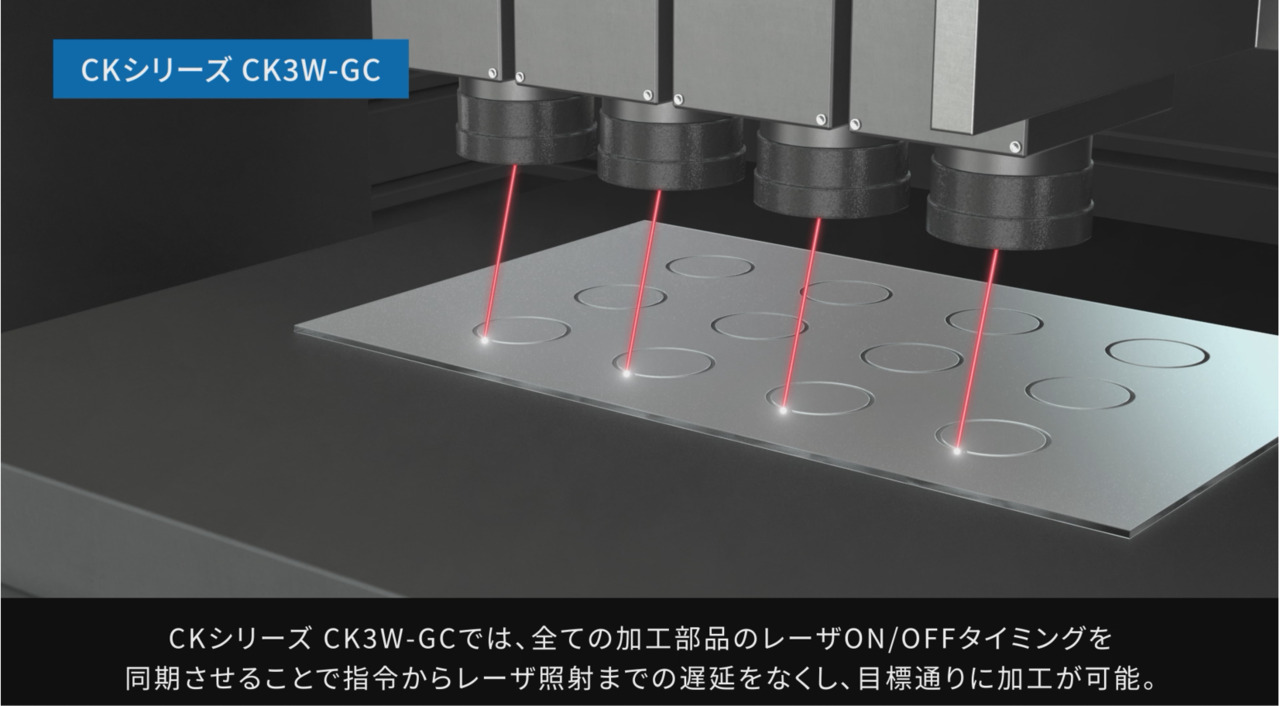
PMACアプリ紹介5 レーザ加工ソリューション(高速高精度、マルチヘッド)
レーザ加工機のタクト改善。ヘッドを複数にする場合ではガルバノスキャナをコントロールする動作クロックがヘッド間ですべて同期するため、特別な調整を行わず全...
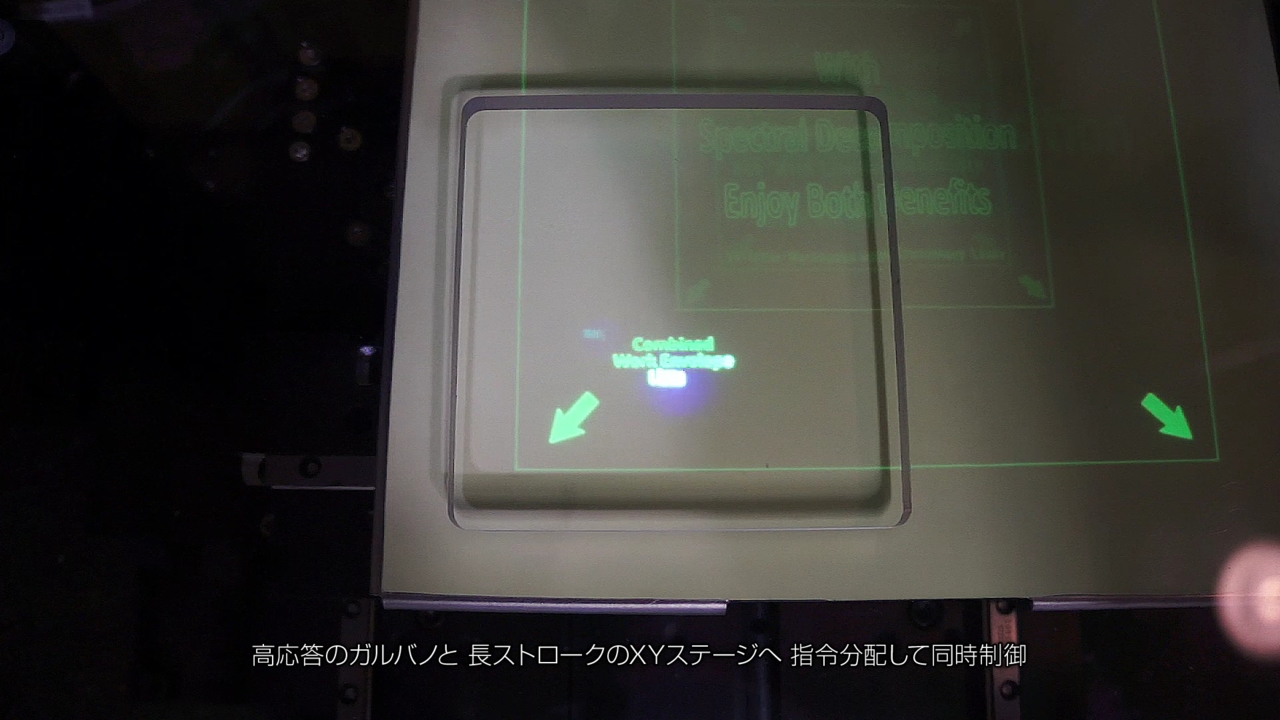
PMACアプリ紹介6 レーザ加工ソリューション(ガルバノスキャナ+ステージ同時制御)
通常ガルバノによる加工は、加工範囲が100mm×100mmと狭いことが課題だったが、ガルバノスキャナとXYステージを同期させて1つの加工を実現。

危険で単調な製品セット&完成品取り出し作業を自動化。人手作業から作業員を解放し生産数の安定化を実現
佐賀県にある金型メーカ 聖徳ゼロテック株式会社さまにおける協調ロボットを活用した事例。 危険作業を自動化することで、従業員の身体的負荷の軽減を実現します...