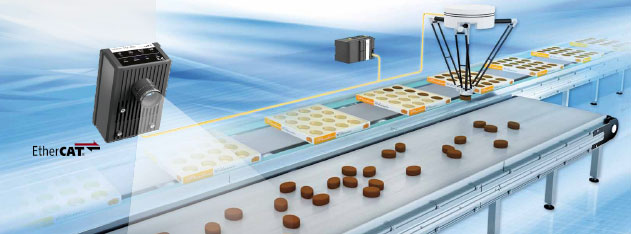
マシンの目となるスマートカメラ
FQ-Mシリーズは位置決めアプリケーションのために開発されたEtherCAT通信対応のスマートカメラです。
エンコーダ入力機能を備えており、移動体の位置決めをより簡単かつ高精度に実現します。設計ツールとして、オムロンのオートメーションソフトウェアSysmac studioが視覚センサのセッティングから各機器間の接続、キャリブレーションをサポートします。
装置との親和性を追求
シンプルな配線が可能なEtherCAT®と汎用Ethernetに対応。また、視覚センサの設定だけでなく、接続機器との“つなぎ”が簡単に実現できるPCソフトウェアもご用意。ビジョンを使ったマシンコントロールをより簡単にします。
高速性と安定性を両立した検出能力
ピック&プレースアプリケーションのために開発された形状サーチを搭載。整列されていないワークを最大5000個/分以上検出できる高速性と、明るさ変動に影響されにくい安定性を両立。ピッキングミスの削減に貢献します。
同期位置決めの実現
F Q-Mにはエンコーダ入力機能を搭載。検出結果として、位置座標データにエンコーダ値をセットして出力することが可能なため、同期制御をより簡単かつ高精度に実現できます。
装置との親和性を追求
モーション機器との接続を考慮し、EtherCATと汎用Ethernetに対応。
オムロン機器との接続はもちろん、各種ロボットとの接続性を高めるアイテムも搭載し、装置へのセットアップ時間を短縮します。
視覚センサ FQ-Mシリーズ
カメラと画像処理プロセッサを統合したコンパクトサイズ。高速モーションネットワークであるEtherCATと汎用Ethernetに対応しています。
フレキシブルにロボットコントローラと接続
接続するロボットコントローラの受信データ配列に合わせて出力プロトコルを柔軟に変更可能。ロボット側でのプログラミングを不要にするとともに、プログラムのミスを避けることもできます。
One Softwareで効率よくセットアップ
Sysmac Studioは視覚センサの設定だけでなく、通信設定や機器間のキャリブレーションまで、全てのプロセスであなたをサポート。オフラインのシミュレーションにも対応しており、アプリケーションの早期立上げに貢献します。
現場でのモニタリングや簡易調整にタッチファインダ
現場ですぐ使える手のひらサイズの小型設定・調整機器。モデル登録の専用ボタンを搭載しています。
クラス最高のパフォーマンス
新開発したエッジベースのオムロン独自アルゴリズムをFQ-Mに搭載。
照明変動、ワークのサイズ変動、部分的な隠れなどが生じた場合でも対象物を確実かつ高速に検出でき、厳しい製造現場の環境下でも安定した検出に貢献します。
高速性と安定性を両立するオムロンの「形状サーチ」
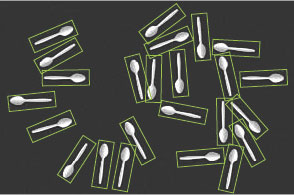
高速検出
回転ワークを最大5000個/分で検出します。
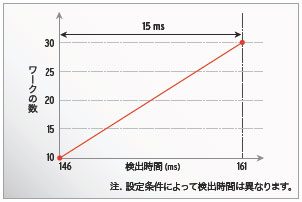
視野内のワーク数が10個の場合と30個の場合の検出時間差はわずか15msです。
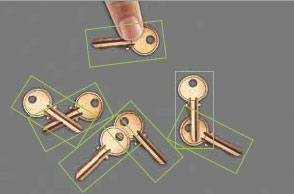
対象物が重なっていたり、部分的に隠れていても安定して検出します。

照明条件が変動しても検出に影響を与えません。
移動体の位置決めを簡単にする
画像処理結果と画像処理の実施タイミングをエンコーダ値として紐付けて接続機器に伝達できることで、移動体の位置決め制御をより簡単に実現できます。【特許出願中】
ウィザード方式のキャリブレーションがシステムアップをサポート

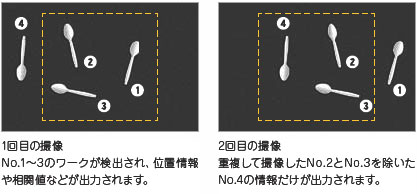
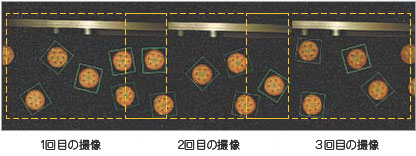
重複撮像した画像をパノラマ表示で調整【特許出願中】
視野を重ねて連続的に撮像した画像をパノラマ表示し、検出結果や撮像間隔を容易に確認できます。画像を1枚1枚確認する必要がありません。
重複検出したワークを自動的に判別【特許出願中】
重複して検出された同一のワークをFQ-Mが自動的に認識し、検出結果を1度だけ出力させることが可能です。同一ワークであることを見極めるプログラムを別コントローラで作成する必要がなくなります。