
多品種変量型生産にロボット制御技術を導入し生産現場を再利用性の高いフレキシブルマシン、品種切換えが速いフレキシブルライン化へ
制御の高速化・高精度化
• Oneコントロールでコンベアとロボット間の高精度同期が可能
• 画像センサなどセンサからの情報を高速にロボット制御へ反映
• EtherCATで、ロボットの動きに同期したマニピュレータ部まで詳細制御可能
開発工数の削減
• One言語(ラダー、ST)でシーケンス制御からロボット制御まで可能
• 画像センサからロボットまでOneソフトウェア(Sysmac Studio)で立上げ可能
• IEC61131-3(およびJIS B 3503)規格に適合した命令でモーション制御からロボット制御までプログラミング
• 統合シミュレーションでの検証資産を実装置開発で再利用可能
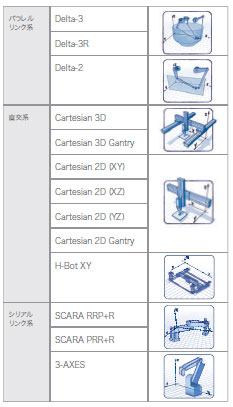
• パラレルリンク系・直交系・スカラロボットで簡単コンベアトラッキング
省スペース・高効率
• Oneコントローラでパラレルリンク系、直交系、シリアルリンク系ロボット合計で最大8台※まで制御可能
• Oneネットワーク(EtherCAT)で必要な機器を接続
• Oneコントローラシステムによる保守効率(人、もの、時間)の向上
※システムに使用する軸数により制御できるロボットの台数は変わります。
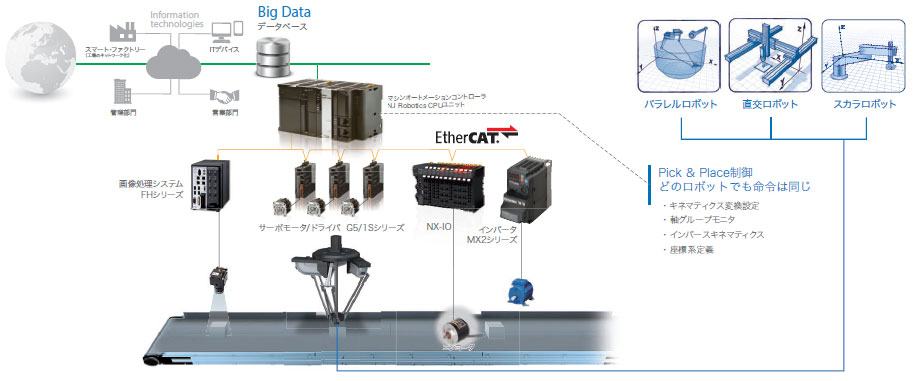
NJ Roboticsは、一般のマシン制御とロボット制御を融合し、お客様のフレキシブルマシン創造に新しい価値をご提案します。
NJ Roboticsによるシステム
• 制御システムとして、ロボット+周辺機器で最大64軸まで1つのコントローラで制御可能
• 制御システムとして、画像センサから I/O、 セーフティコントローラ、ロボットまで、EtherCAT 1種類のネットワークで構築
• DB接続機能搭載タイプでは上位へシステム情報をアップすることも可能
ロボットの種類を問わずスケーラブルに簡単プログラミング
コンベアトラッキングシステムを構築する際、パラレルリンク系・直交系・スカラとロボットの機構が違っても、Pick & Place制御プログラミングは同じ構成・手法で構築が可能。
統合シミュレーション機能で事前検証の効率化
ロボットを動かすモーション制御プログラムと画像センサの検査計測プログラムが連動し、統合したシミュレーションを実行することができます。
また、仮想空間上で、機械の動きを視覚的にシミュレート可能。
さらに複数台のロボット間同期もシミュレートできるので、複雑な動作検証を簡単に実行できます。

統合シミュレーション※
画像センサの計測結果を基に、機械がどのように動くかをシミュレートできます。
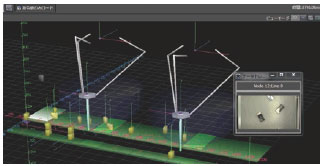
※統合シミュレーションで選択できるロボットタイプはパラレルリンクロボット(Delta3 および Delta3R)のみです。
複数軸の設定・調整工数を削減
ドライブ設定テーブル
ひとつのウィンドウで、複数ドライバの設定・モニタが可能です。
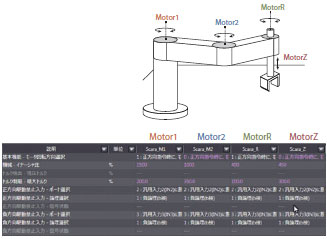
複数ドライブ簡単チューニング
短時間で同時に複数の1Sシリーズ サーボドライバを調整することができます。
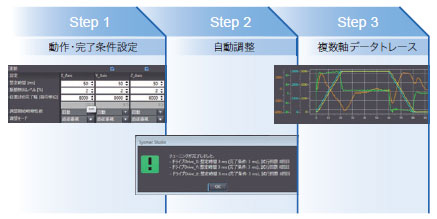
バーチャルとリアルをつなぐ、5ステップ
5ステップでPick & Place装置の立ち上げまで実現
新しいソリューションでは、統合された開発環境 Sysmac Studioがお客様の業務プロセス改善を実現します。
従来、実機による検証が不可欠であった機械のロジック検証やロボットのレイアウト検証をバーチャル環境下で実現できます。
さらに、Sysmac Studioが簡単なキャリブレーション作業を実現。高速な現場での装置設置立ち上げを実現できます。
Pick & Place装置を3Dシミュレータで可視化し、5つの簡単なステップで装置に適用します。

検出可否の確認
Sysmac Studioで準備したワーク画像を読み込むことで検査・計測の設定およびシミュレーションができます。
使用した画像データ・設定データは次のステップでそのまま再利用できます。
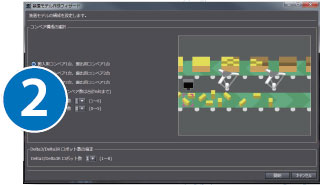
コンベアの条件を設定し、ワーク位置をシミュレーション 【PATENTED】
Vision & Robot 統合シミュレータに、シミュレーション条件を設定します。
コンベア長、カメラ設置位置等の条件を設定することで、画像センサの計測結果をもとに仮想コンベア上を流れるワークの位置をシミュレートできます。

3Dシミュレーション 【PATENTED】
仮想コンベア上を流れる実画像から発生させた仮想ワークをロボットが追従できるかを視覚的にシミュレーションできます。うまくロボットが動作しない場合は、ロボットプログラムを修正し、動作を再シミュレートしましょう。
3Dシミュレーションの動きは動作時間とセットでビデオファイルに出力でき、装置の動きを関係者と簡単に共有できます。

プログラミングと配線のチェック
3Dシミュレーションで検証したアプリケーションプログラムを、装置システム開発に活用することができます。
周辺機器の実配線との整合性をSysmac Studioで確認できます。
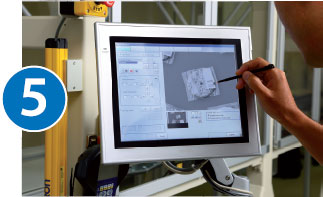
現場で簡単に位置調整 【PATENT PENDING】
Sysmac Studioに搭載されたキャリブレーションウィザードで、画像センサのカメラ、ロボット、コンベアの座標を簡単調整。
複雑なキャリブレーション作業を簡単に実行できます。
画像センサの調整が完了したらすぐに、装置動作確認を行っていただけます。
注. 本カタログで掲載している特許取得状況は、2015年11月における日本の特許の状態です。
プロジェクト全体にかかる期間を最大1/2まで短縮できます
事前検証、プログラミング、立上げ工数を削減し、検討開始から完成までの期間を削減できます。

Sysmacは、オムロン株式会社製FA機器製品の日本及びその他の国における商標または登録商標です。
Windowsは、米国Microsoft Corporationの米国およびその他の国における登録商標です。
EtherCAT®は、Beckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり登録商標です。
EtherNet/IP™およびDeviceNet™はODVAの商標です。
その他、記載されている会社名と製品名などにつきましては、各社の登録商標または商標です。