
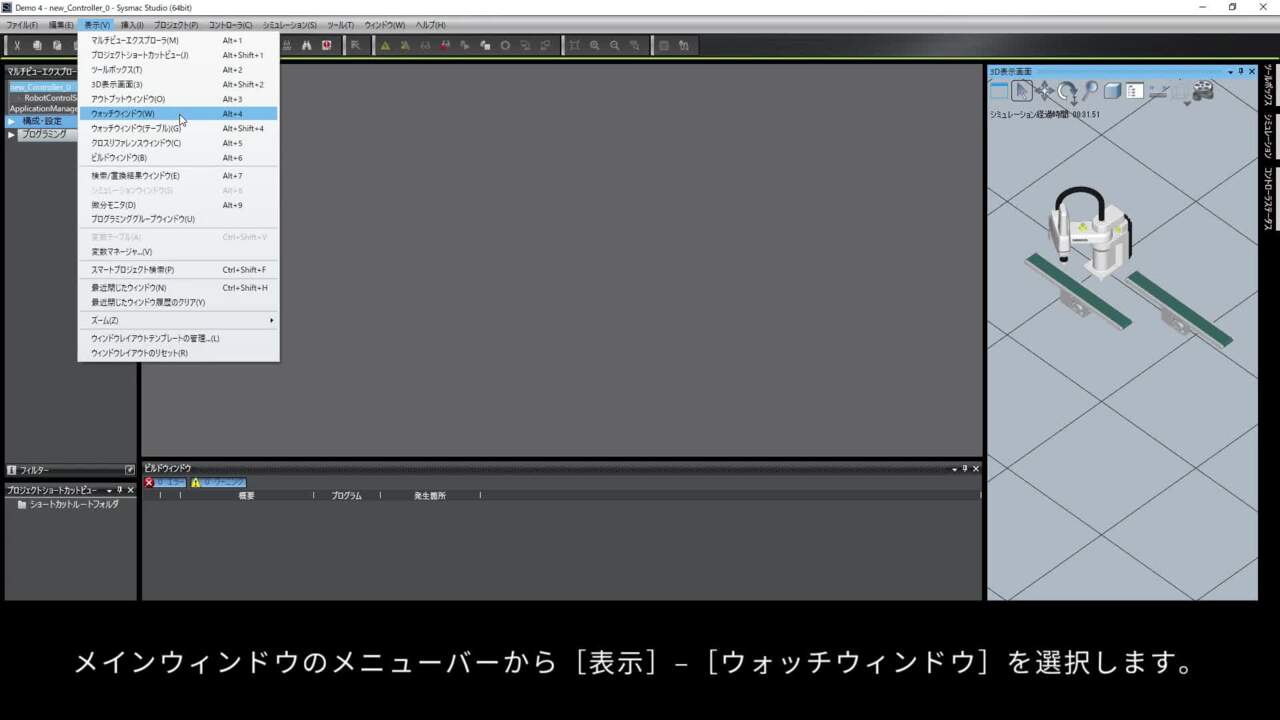
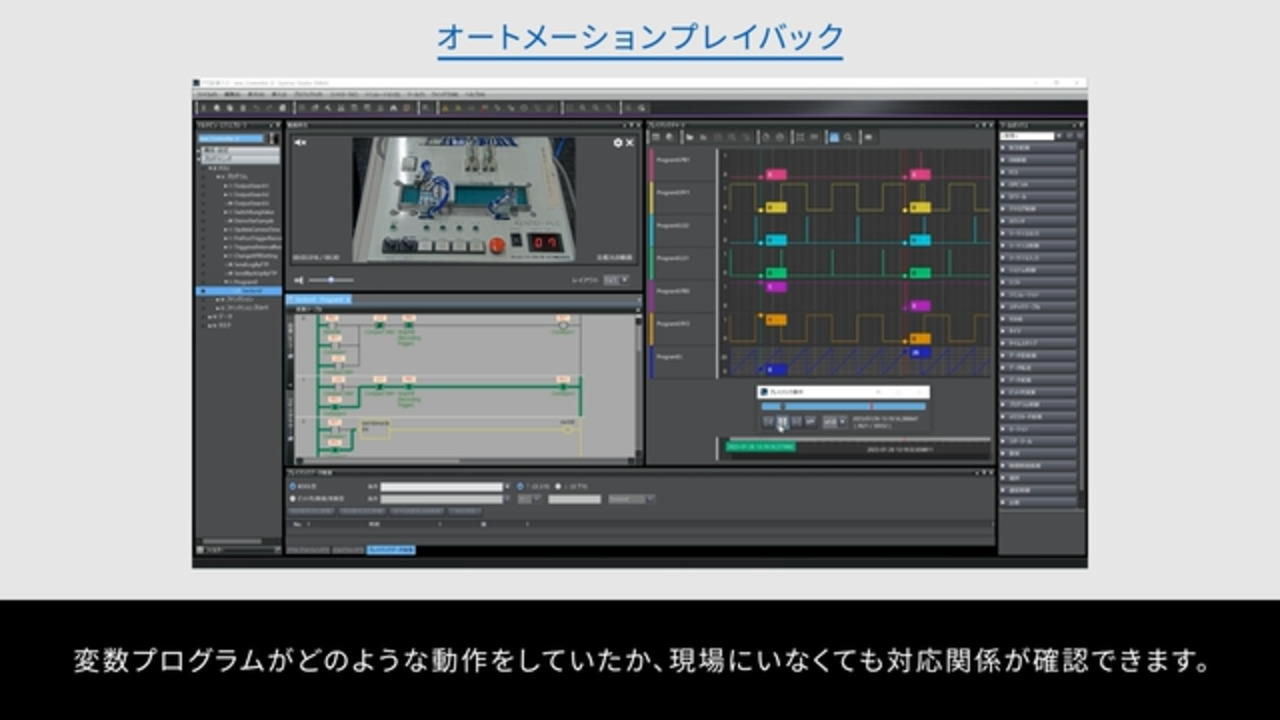
オートメーションプレイバック機能 - 仮想動作と実動作間でギャップのない装置シミュレーション
装置の動作データと仮想シミュレーション動作データでギャップのないシミュレーションが行える様子をご紹介します。
【公開日】2025/06/02
【時間】1:47
この動画の関連情報

あわせて見たい動画
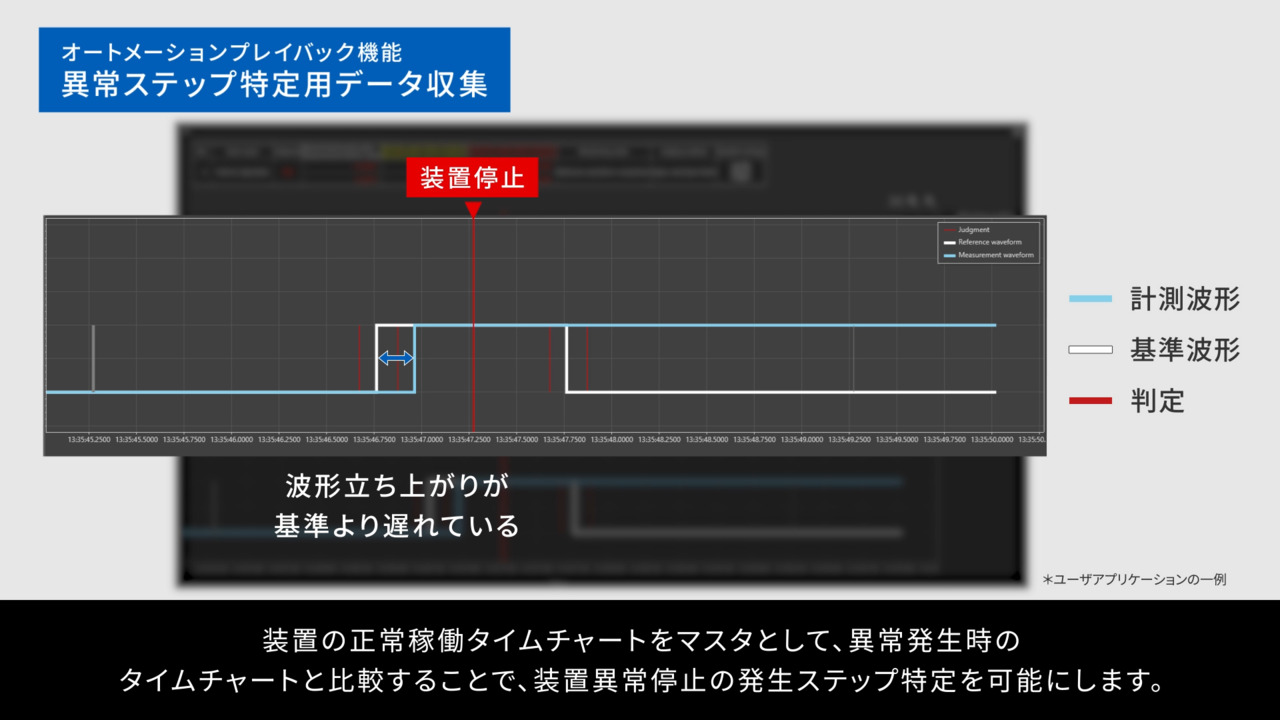
オートメーションプレイバック機能 - 装置異常停止の発生ステップ特定
装置の異常ステップ特定用データを使用し、異常発生ステップを特定する様子をご紹介します。
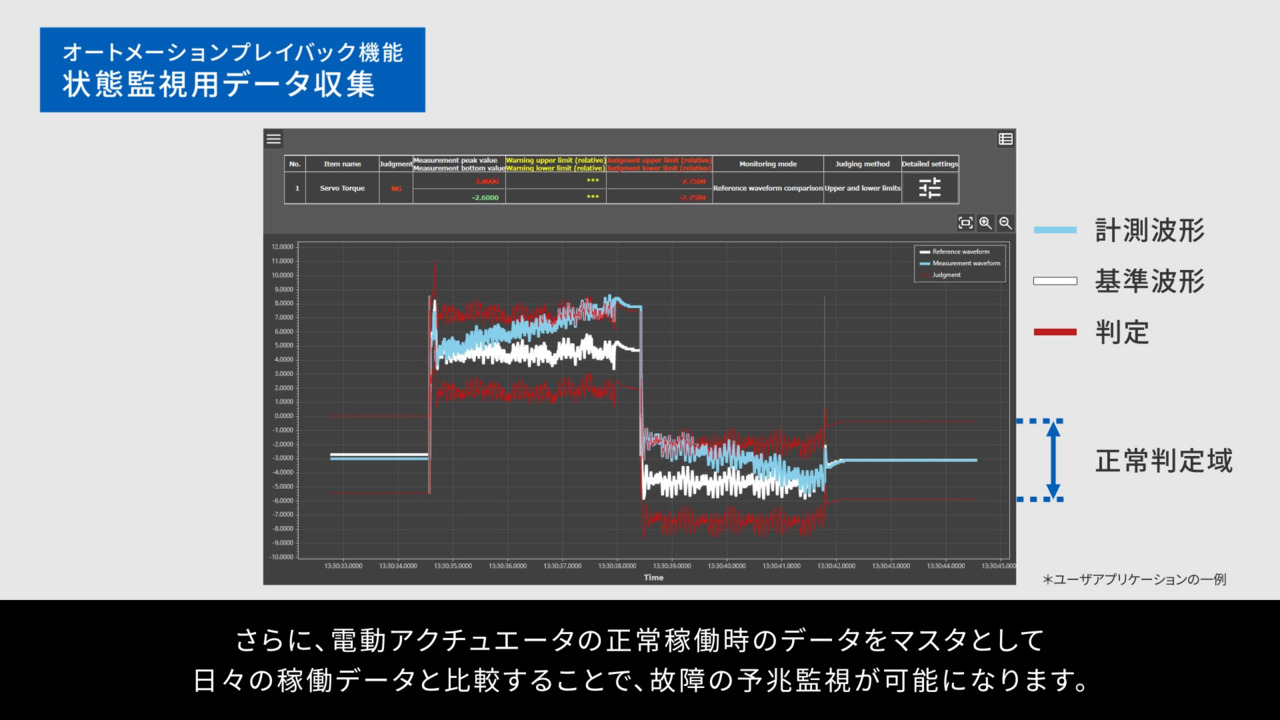
オートメーションプレイバック機能 - 電動アクチュエータ故障の予兆監視
監視回路を制御回路に追加することなく、電動アクチュエータの稼働データ比較を行い、故障の予兆監視を実現する様子をご紹介します。
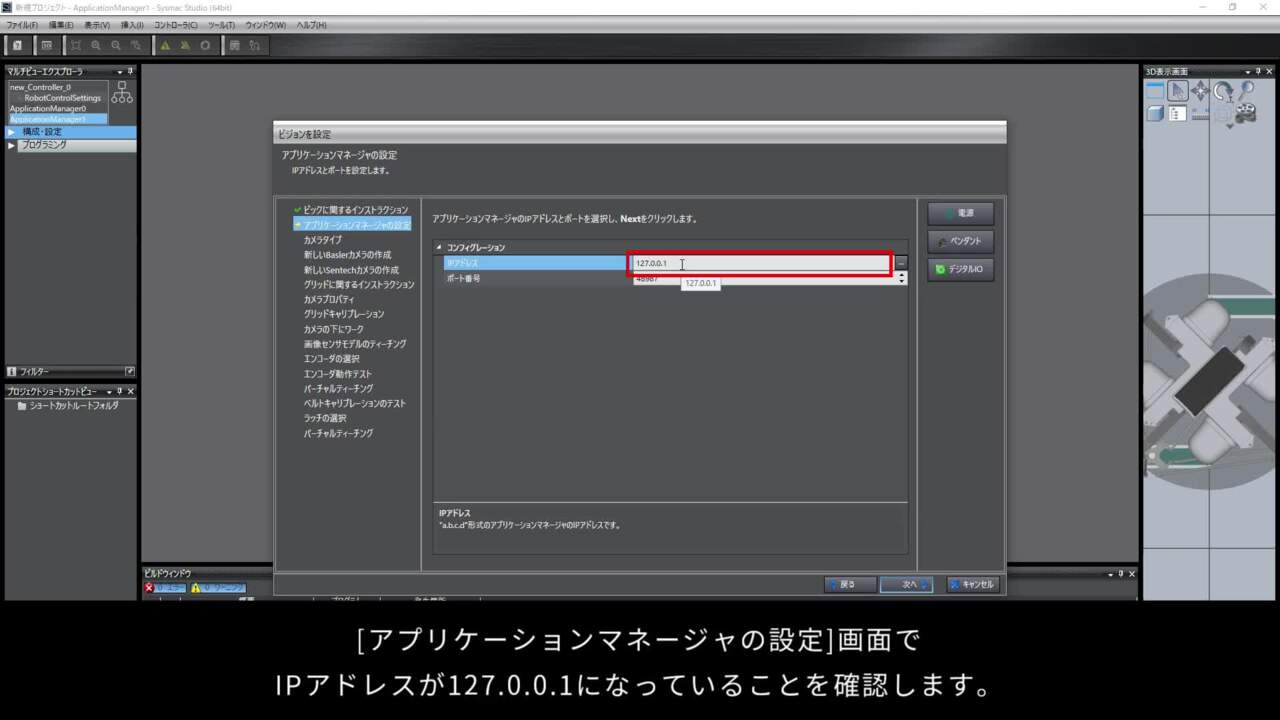
【ロボット統合システムスタートアップガイド】ロボット動作設定 Pack Managerサンプル作成
Sysmac StudioのPack Managerの機能を使用してシミュレーションで動的ピック&プレース装置を設定する手順を示します。
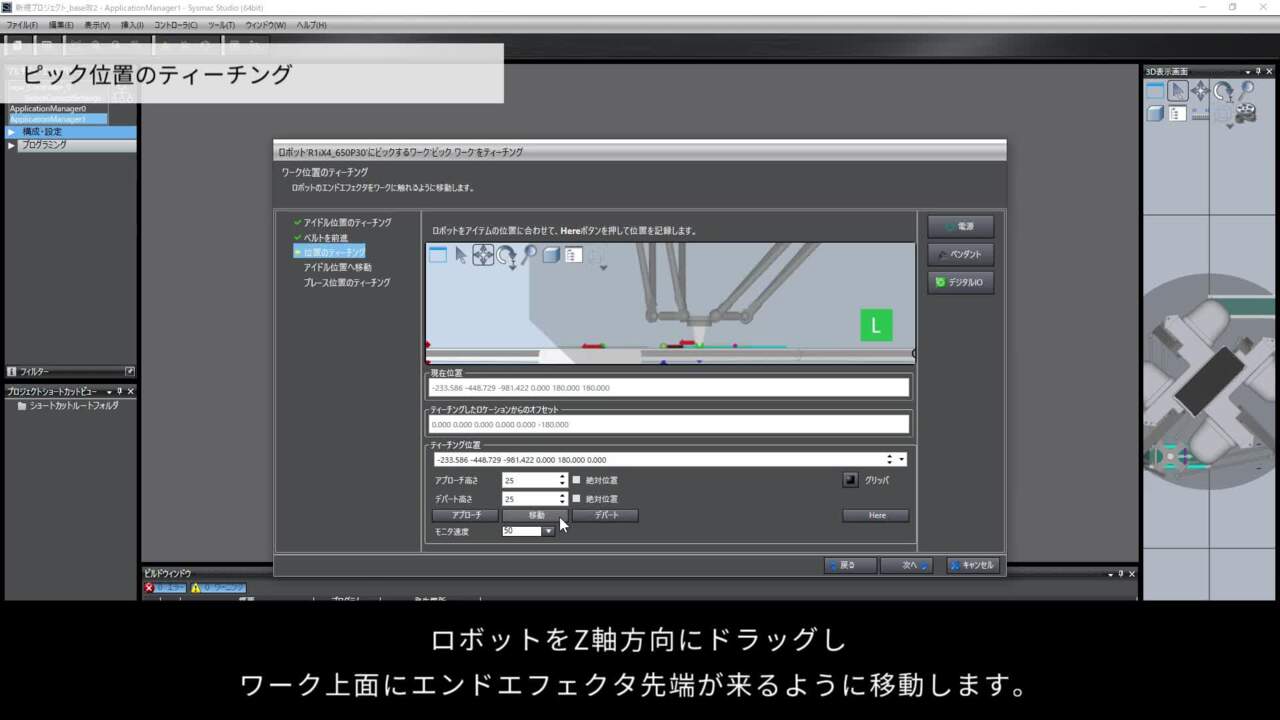
【ロボット統合システムスタートアップガイド】ロボット動作設定 Pack Managerでのティーチング
Pack Managerの機能を使用してシミュレーションで動的ピック&プレース装置のピック位置、プレース位置をティーチングする手順を示します。
【ロボット統合システムスタートアップガイド】シミュレーションでの動作確認
Sysmac Studioのシミュレーション機能を使用してロボットの動作を確認する手順を示します。
垂直立上げと安定稼働を両立
装置立上げ時の再現性の低い問題や、稼働中のトラブル原因究明時間を短縮する、NX5のオートメーションプレイバック機能についてご紹介します。