
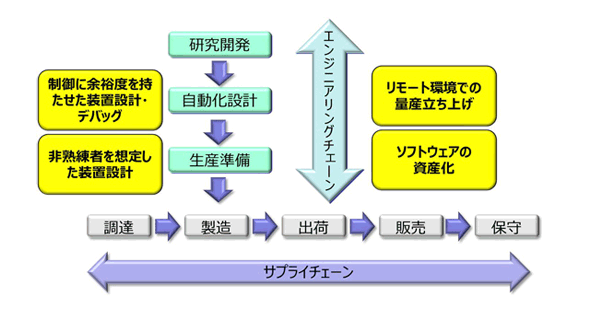
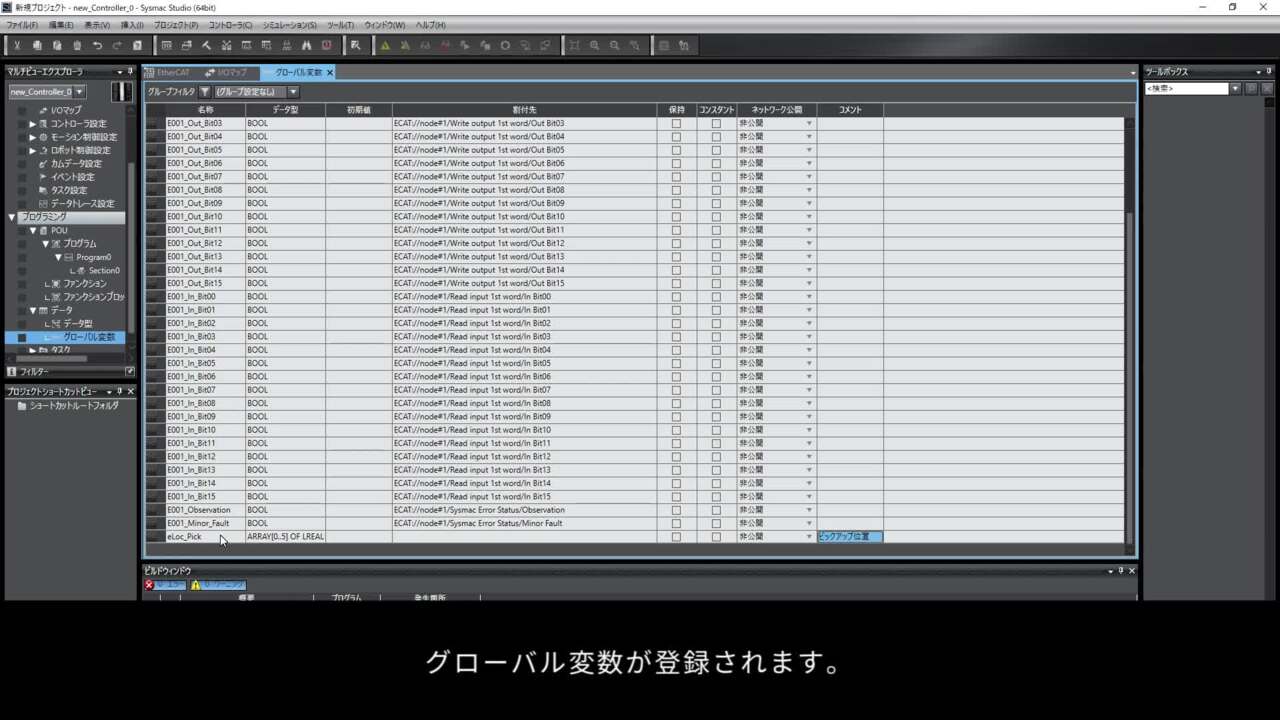
Sysmac studioでの制御プログラム設定・検証
PLCopen®の「軸」を使うことによりモーション制御の設定が用意になる事例です。
【公開日】2015/01/05
【時間】1:57
この動画の関連情報

あわせて見たい動画
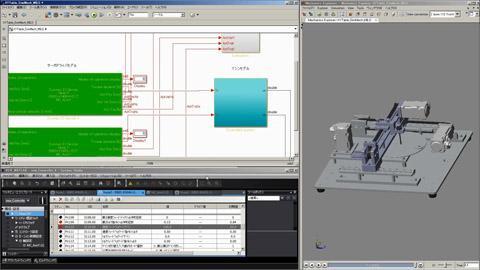
SysmacとMathworks社との連携ソリューション
3Dグラフィックを使った仮想開発環境で、サーボの遅れ、荷重、摩擦などの影響まで制御の余裕度を確認することができます。
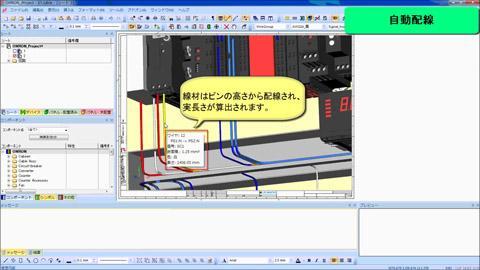
3D電気制御CADの活用
設計・製造工数削減といったお客様の制御盤設計の効率化をサポート。

パラレルリンクロボットでのワーク搬送制御
汎用コントローラによるパラレルリンクロボット制御で賢く柔軟な搬送システムを実現します。Sysmacは画像処理・パラレルリンクの座標演算・サーボモータを高速高...
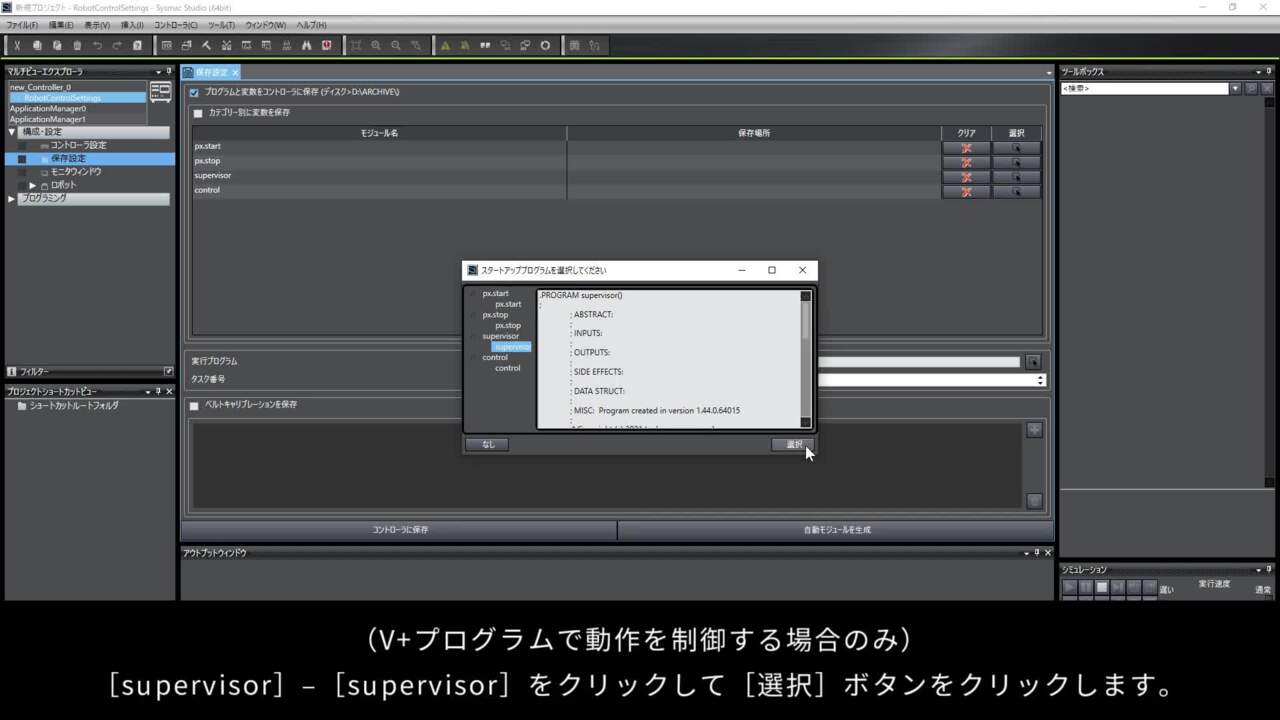
【ロボット統合システムスタートアップガイド】V+プログラムと変数の電源ON時の自動読み込みの設定
電源ON時にV+プログラムとグローバル変数を自動的に読み込むための設定手順を説明します。
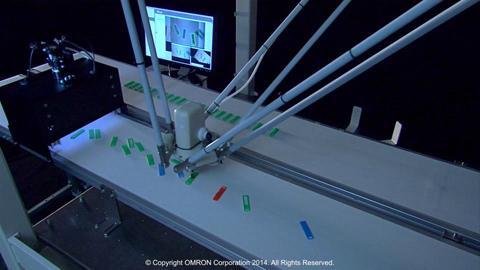
パラレルリンクロボットでの仕分・整列制御
NJロボティクスと画像処理、パラレルリンクの座標演算、サーボモータを高速高精度に制御し、多品種・変量生産に適した仕分け・整列制御をおこないます。
【ロボット統合システムスタートアップガイド】シーケンス制御プログラムの作成
シーケンス制御プログラムの作成手順を説明します。