• 当社製NJ501-RとEtherCATで接続し、使い慣れたIEC 61131-3プログラム言語またはスクリプト(eV+)を介してプログラム可能
• コンベア速度1.4m/sまで追従可能
• マルチハンド(複数個取り)に対応するため可搬質量を高く設計
• 高速コンベア上での高速Pick&Placeに対応
• 架台コストの削減とロボットの振動低減に貢献
• 可動範囲最大直径1130mm
• 可動範囲垂直方向425mm
• 最大可搬質量8kg
• 本体質量52kg

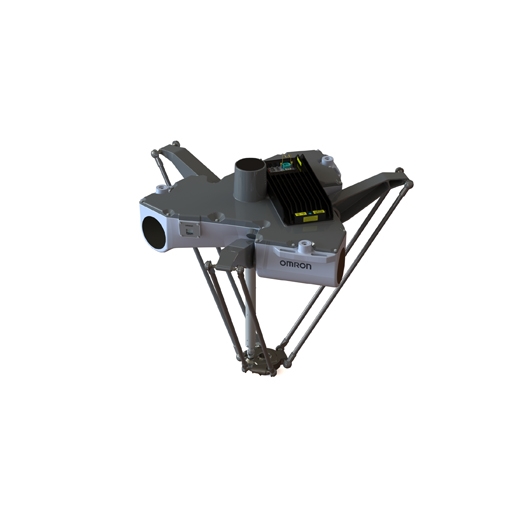
パラレルロボット EtherCAT (NJ501-R)対応バージョン
食品、薬品、医療品業界に最適なパラレルロボット
• 当社製NJ501-RとEtherCATで接続し、使い慣れたIEC 61131-3プログラム言語またはスクリプト(eV+)を介してプログラム可能
• コンベア速度1.4m/sまで追従可能
• マルチハンド(複数個取り)に対応するため可搬質量を高く設計
• 高速コンベア上での高速Pick&Placeに対応
• 架台コストの削減とロボットの振動低減に貢献
• 可動範囲最大直径1130mm
• 可動範囲垂直方向425mm
• 最大可搬質量8kg
• 本体質量52kg