
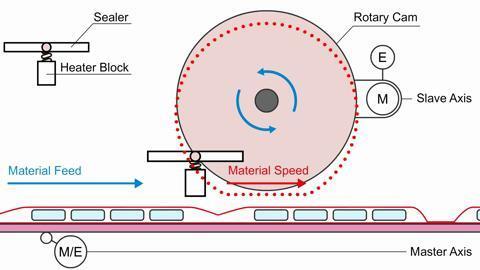
ロータリナイフファンクションブロック
包装機制御に必要となるロータリナイフの演算処理をファンクションブロック。電子カム演算方式を用いた可変長切断制御を実現します。
【公開日】2014/12/15
【時間】1:52
この動画の関連情報
あわせて見たい動画

Sysmac包装機自動化ライン(概要)
Sysmacは、搬送・包装・検査・仕分けの出荷検査ラインにもとめられる機能を統合制御 画像処理・座標演算・モータを統合制御が可能です。 さらに複数工程を同期し...
包装機ライブラリ(ボックスモーション編)
高品質シールと高速包装を支えるボックスモーション機構。モータ制御に必要となる複雑な演算による動きをご覧いただけます。
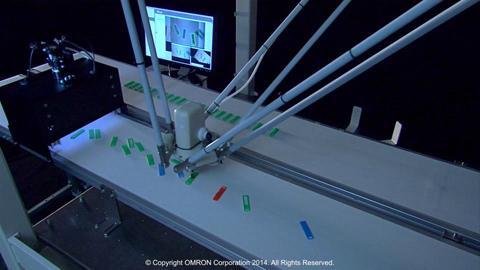
パラレルリンクロボットでの仕分・整列制御
NJロボティクスと画像処理、パラレルリンクの座標演算、サーボモータを高速高精度に制御し、多品種・変量生産に適した仕分け・整列制御をおこないます。

パラレルリンクロボットでのワーク搬送制御
汎用コントローラによるパラレルリンクロボット制御で賢く柔軟な搬送システムを実現します。Sysmacは画像処理・パラレルリンクの座標演算・サーボモータを高速高...

横ピロー包装機モデル(Sysmac包装機自動化ライン)
Sysmacは包装に求められる機能の統合制御を実現します。
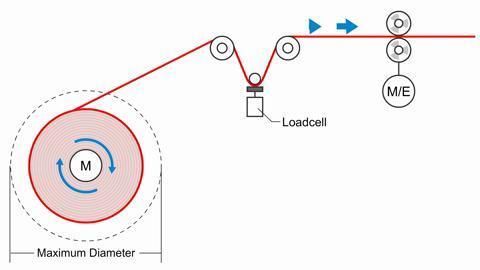
包装機ライブラリ(ワインダ/アンワインダ編)
連続包装材を巻き取る(巻取り装置)または巻き出す(巻出し装置)際のテンション制御をご覧いただけます。