
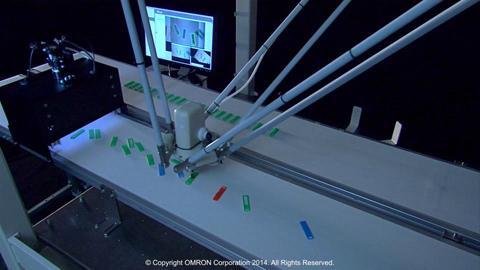
パラレルリンクロボットでのワーク搬送制御
汎用コントローラによるパラレルリンクロボット制御で賢く柔軟な搬送システムを実現します。Sysmacは画像処理・パラレルリンクの座標演算・サーボモータを高速高精度に制御。またEtherCATにより画像処理、コントローラ、サーボドライバとの入出力スループット高速化を実現します。
【公開日】2014/12/15
【時間】1:57
この動画の関連情報
あわせて見たい動画

オムロン 2連パラレルリンクロボットによる仕分け・整列
2連パラレルロボットを制御する統合コントローラ機能に注目!Sysmacはコントローラ1台でパラレルリンクロボット最大8台まで制御可能。EtherCATによる、入出力...
パラレルリンクロボットでの仕分・整列制御
NJロボティクスと画像処理、パラレルリンクの座標演算、サーボモータを高速高精度に制御し、多品種・変量生産に適した仕分け・整列制御をおこないます。

制振制御 ワーク搬送時のずれ(ガラス板)
搬送されたガラス板の停止位置のずれにご注目!振動抑制ファンクションブロックにより、動作時に発生する振動を抑制しながら高速搬送を実現します。

制振制御 複合構造の揺れ
制振制御ファンクションブロックにより、搬送時に発生する複合共振の振動を抑制し、高速搬送を実現します。

制振制御 液体搬送時のこぼれ(水コップ)
コップの水面にご注目!振動抑制ファンクションブロックにより、動作時に発生する振動を抑制しながら高速搬送を実現します。

制振制御 吊り下げ搬送時の揺れ(鉄板吊り下げ編)
鉄板の揺れにご注目!振動抑制ファンクションブロックにより、動作時の振動を抑制し高速搬送を実現します。